to
Изобретение относится к подъемно-транспортному оборудованию, а именно к устройствам для предохранительного торможения подъемных установок, и может быть использовано в горнорудной и шахтной промышленности.
Цель изобретения - повышение надежности эксплуатации устройства.
На фиг. 1 изображено предлагаем-ое устройство, общий вид; на фиг. 2 - разрез А-А на фиг. .
Устройство содержит шкивы трения 1, огибаемые сбегаемой и набегаюш,ей ветвями каната 2, тормозные колодки 3, обеспечи- ваюш,ие торможение шкивов 1 трения, тормозные балки 4 дугообразной формы, име- юш,ие на своих концах дополнительные тормозные колодки, балансиры 5, используемые для попарного соединения между собой тормозных балок 4, тяги б и рычаги 7 для подсоединения тормозных балок 4 к пружинно-пневмогрузовому приводу 8.
Тормозные балки 4 установлены на раме октлоняюш,их Н1КИВОВ 9 со стороны обхвата их канатами 2.
Система управления работой устройства включает в себя датчик 10 линейной скорости шкивов 1 трения, датчик 1 скоро- 25 сти, элемент 12 сравнения, нелинейный блок 13 с регулируемой зоной нечувствительности, логический элемент ИЛИ 14, усилитель 15, исполнительные механизмы 16, датчик 17 переподъема подъемных сосудов, блок 18 ручного управления и датчики 19 0 положения привода 8, имеюш,его специальный груз 20. Пульт 21 управления подъемной установкой с помошью канала 22 пнев- мосистемы связан с исполнительными механизмами 23, соединенными с пневмоприлинейным блоком 13 и через наперед заданное время передается на логический элемент ИЛИ 14 и после усилителя 15 поступает на пульт 21 управления, который подает управляющий сигнал по каналу 28 пнев- мосвязи на исполнительные механизмы 16, в результате чего из полостей пневмоци- линдров приводов 8 выпускается воздух и под действием пакетов пружин и специальных грузов 20 поворачивается рычаг 7, и с помощью тяг 6 и балансира 5 тормозные колодки, размещенные на концах тормозной балки 4, захватывают канаты 2 над отклоняющими шкивами 9 и под ними. Происходит торможение канатов 2.
В случае переподъема подъемных сосу- 5 дов сигнал от датчика 17 переподъема подается на элемент ИЛИ 14 и в дальнейшем {по вышеописанной схеме) происходит торможение канатов 2.
В случае необходимости машинист подъ- - ем а с помощью блока 18 ручного управления может осуществлять экстренное торможение. Блоком 18 ручного управления можно производить захват канатов 2 при неработающей подъемной установке, например, при подтяжке канатов, при их замене.
В условиях предохранительного торможения канатов 2 при их групповом затормаживании необходимо обеспечивать синхронность работы пружинно-групповых приводов 8 для обспечения синхронного погашения линейных скоростей канатов 2.
Равномерность зажатия канатов 2 понар- но соединенными тормозными колодками гарантируется балансирны.м закреплением тормозных колодок 3. Если усилие прижатия канатов 2 в одной паре колодок из-за неравномерного натяжения канатов 2, окаводами 24, имеющими специальные грузы 25. 5 жется меньше, чем в другой, сразу же авто- Тяги 26 и рычаги 27 в совокупности со матически произойдет перераспределение и
нивелирование усилий одностороннего зажатия канатов 2 тормозными колодками.
стойками образуют пространственные параллелограммы и обеспечивают торможение шкивов 1 трения тормозными колодками 3.
Пульт 21 управления с помощью кана- Q ла 28 пневмосистемы связан с исполнительными механизмами 16 приводов 8.
Устройство работает следующим образом.
В режиме предохранительного торможения подъемной установки с пульта 21 упФормула изобретения
Устройство для предохранительного торможения канатной подъемной установки, содержащее смонтированные на раме щки- вы трения и снабженные приводом торравления по каналу 22 пневмосвязи пода- 45 мозные колодки, попарно связанные между ется управляющий сигнал через исполнитель- собой балансирами и соединенные с их ные механизмы 23 на пневмоприводы 24, в приводом посредством рычагов и тяг, а так- результате чего выпускается воздух из ци- же систему управления работой устройства, линдров и под воздействием пакета пружинвключающую .в себя датчики линейных ско(не показаны) и специальных грузов 25 по-ростей шкивов трения и сбегающей и набесредством рычагов 27 и тяг 26 тормозные 50 гающей ветвей канатов, огибающих эти
шкивы трения, элемент сравнения этих линейных скоростей и пульт управления, связанный пневмосистемой с приводом тормозных колодок, отличающееся тем, что, с целью повышения надежности эксплуатации, оно снабжено установленны.ми на раме
колодки 3 прижимаются к тормозным полям шкивов 1. Происходит предохранительное торможение.
В случае появления проскальзывания канатов 2 по шкиву 1 трения на выходе элемента 12 сравнения сигналов датчиков 10и 11 линейных скоростей появляется сигнал рассогласования, который воспринимается не55
тормозными отклоняющими шкивами и расположенными со стороны обхвата этих отo
25 0
линейным блоком 13 и через наперед заданное время передается на логический элемент ИЛИ 14 и после усилителя 15 поступает на пульт 21 управления, который подает управляющий сигнал по каналу 28 пнев- мосвязи на исполнительные механизмы 16, в результате чего из полостей пневмоци- линдров приводов 8 выпускается воздух и под действием пакетов пружин и специальных грузов 20 поворачивается рычаг 7, и с помощью тяг 6 и балансира 5 тормозные колодки, размещенные на концах тормозной балки 4, захватывают канаты 2 над отклоняющими шкивами 9 и под ними. Происходит торможение канатов 2.
В случае переподъема подъемных сосу- 5 дов сигнал от датчика 17 переподъема подается на элемент ИЛИ 14 и в дальнейшем {по вышеописанной схеме) происходит торможение канатов 2.
В случае необходимости машинист подъ- - ем а с помощью блока 18 ручного управления может осуществлять экстренное торможение. Блоком 18 ручного управления можно производить захват канатов 2 при неработающей подъемной установке, например, при подтяжке канатов, при их замене.
В условиях предохранительного торможения канатов 2 при их групповом затормаживании необходимо обеспечивать синхронность работы пружинно-групповых приводов 8 для обспечения синхронного погашения линейных скоростей канатов 2.
Равномерность зажатия канатов 2 понар- но соединенными тормозными колодками гарантируется балансирны.м закреплением тормозных колодок 3. Если усилие прижатия канатов 2 в одной паре колодок из-за неравномерного натяжения канатов 2, жется меньше, чем в другой, сразу же авто- матически произойдет перераспределение и
Формула изобретения
тормозными отклоняющими шкивами и расположенными со стороны обхвата этих отклоняющих шкивов канатами, дополнительными тормозными колодками, попарно связанными между собой дополнительными балансирами, причем каждая пара этих дополнительных колодок снабжена соответствующим ей дополнительным приводом, а система управления работой устройства снабжена нелинейным блоком с регулируемой зоной нечувствительности, логическим элементом ИЛИ с блоком усиления, блоком ручного управления, датчиком переподъема установки и датчиками положения дополнительных приводов каждой пары тормозных
колодок, причем выход вышеупомянутого элемента сравнения соединен с входом нелинейного блока, выход которого соединен с одним из входов логического элемента ИЛИ, а два других его входа соединены с
выходом блока ручного управления и выходом датчика переподъема, выход элемента ИЛИ через блок усиления подсоединен к одному из входов пульта управления, другой вход которого выполнен с возможностью поочередного подключения выходов датчиков положения дополнительных приводов.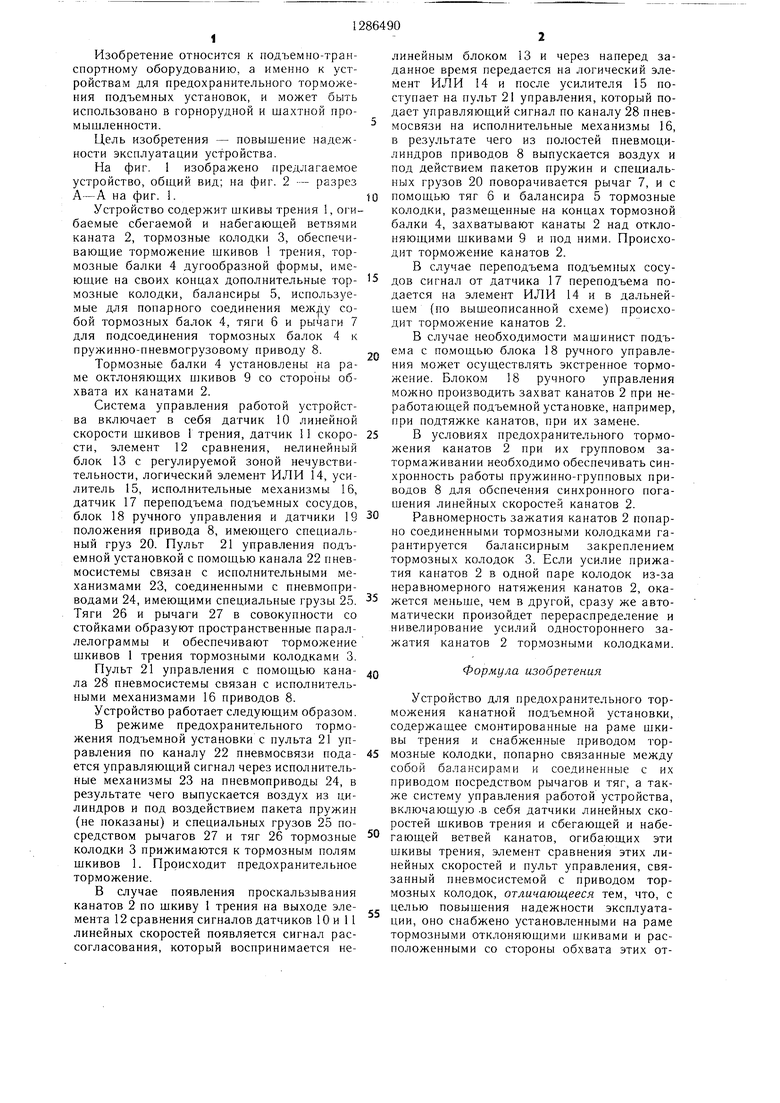
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для предохранительного торможения подъемной установки со шкивами трения | 1978 |
|
SU713811A1 |
| Устройство для предохранительного торможения подъемной установки со шкивами трения | 1985 |
|
SU1310320A1 |
| ЭЛЕКТРОПРИВОД | 2012 |
|
RU2531380C2 |
| Способ определения тормозного усилия подъемной установки | 1987 |
|
SU1518261A1 |
| БЛОК КОНТРОЛЯ СКОРОСТИ И УСКОРЕНИЯ С УПРАВЛЯЕМЫМ ЭЛЕКТРОННЫМ СПОСОБОМ ПУСКОВЫМ СЕРВОМЕХАНИЗМОМ ДЛЯ ПРИМЕНЕНИЯ В ПОДЪЕМНО-ТРАНСПОРТНЫХ СРЕДСТВАХ | 2008 |
|
RU2472693C2 |
| ГРУЗОВОЙ ПОДЪЕМНИК С БЕЗРЕДУКТОРНЫМ ЭЛЕКТРОПРИВОДОМ И РАЗГРУЗОЧНО-ЛОВИТЕЛЬНЫМ УСТРОЙСТВОМ | 2011 |
|
RU2468982C1 |
| Грузоподъемное устройство | 1983 |
|
SU1294766A1 |
| Ленточный тормоз буровой лебедки | 1981 |
|
SU988758A1 |
| ТОРМОЗ КАБИНЫ ЛИФТА С КОЛОДКАМИ, ПРИВОДИМЫМИ В ДЕЙСТВИЕ ПРУЖИНАМИ, СОЕДИНЕННЫМИ С ЗУБЧАТЫМ ПРИВОДОМ | 2009 |
|
RU2495290C2 |
| УСТРОЙСТВО АВАРИЙНОГО ТОРМОЖЕНИЯ | 2013 |
|
RU2527626C1 |

Изобретение относится к подъемно- транспортному оборудованию, а именно к устройствам для предохранительного торможения подъемных установок, и может быть использовано в горнорудной и шахтной промышленности. Цель изобретения - повышение надежности эксплуатации. Устройство содержит шкивы 1 трения, огибаемые канатом 2, тормозные колодки 3, тормозные балки 4 с дополнительными тормозными колодками, попарно связанными между собой балансирами 5. Тормозные балки 4 установлены на раме отклоняющих шкивов 9 со стороны обхвата их канатами 2. А система управления работой устройства снабжена нелинейным блоком 13 с регулируемой зоной нечувствительности, логическим элементом ИЛИ 14с блоком усиления 15, блоком 18 ручного управления, датчиком 17 переподъема установки и датчиком 19 положения приводов 8 каждой пары тормозных колодок на бал 1 ах 4, причем выход элемента сравнения 12 соединен со входом нелинейного блока 13, выход которого соединен с одним из входов логического элемента ИЛИ 14, а два других его входа соединены с выходом блока 18 ручного управления и выходом датчика 17 переподъема, выход элемента ИЛИ 14 через блок усиления 15 подсоединен к одному из входов пульта управления 21, другой вход которого выполнен с возможностью поочередного подключения выходов датчиков 19 положения приводов 8. 2 ил. (Л с N: ос а 4 Фиг.1
А9 2
Фиг. 2
| Устройство для предохранительного торможения подъемной установки со шкивами трения | 1978 |
|
SU713811A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
