Изобретение относится к захватным устройствам роботов и манипуляторов и наиболее эффективно при работе в особых условиях, характерных для электровакуумного, полупроводникового и химического производства.
Целью изобретения является расширение ехнических возможностей устройства.
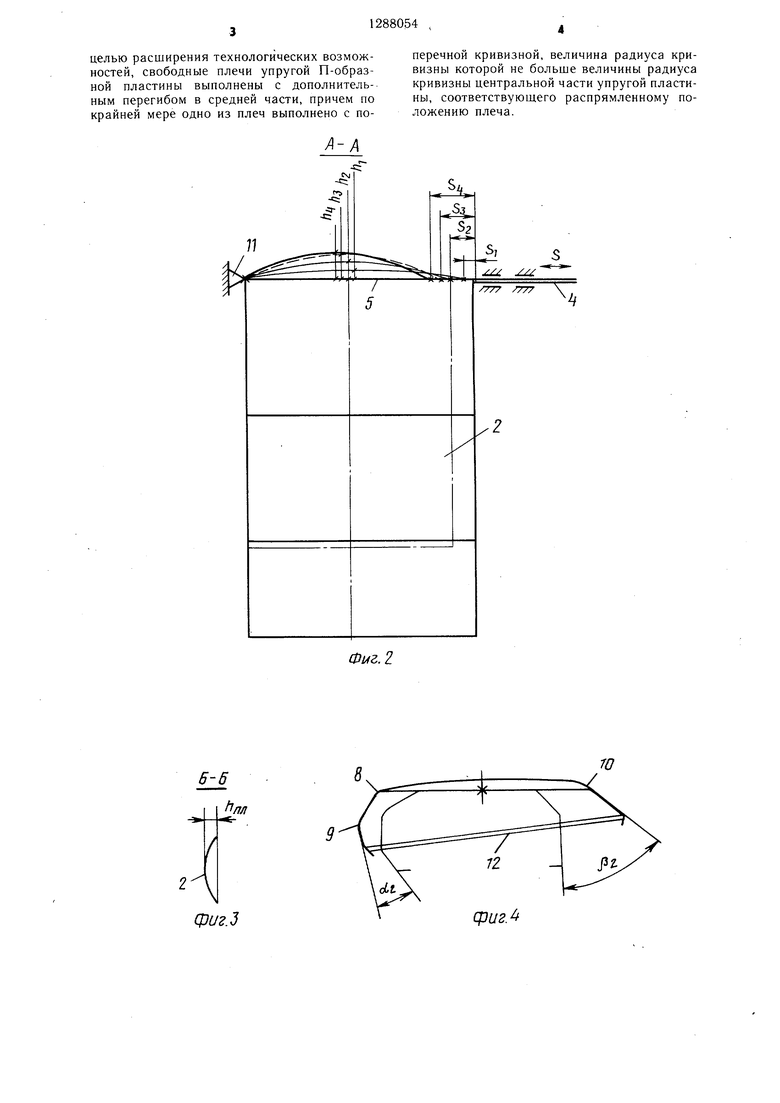
На фиг. 1 показано захватное устройтво в исходном положении; на фиг. 2 - разез А-А на фиг. 1; на фиг. 3 - сечение Б-Б а фиг. 1; на фиг. 4-6 - различные полоения захватного устройства при работе. Захватное устройство состоит из упруой П-образной пластины 1 (фиг. 1 и 2), имеющей свободно отогнутые плечи 2 и 3, и толкателя 4, воздействуюп его на центральную часть 5 пластины. Плечи 2 и 3, отогнутые от центральной части по радиусным перегибам 6 и 7, имеют дополнительные перегибы 8, 9 и 10. Плечо 2 в распрямленном положении имеет поперечную кривизну (фиг. 3), распространяющуюся в распрямленном положении плеча на линии перегибов 8 и 9.Высота Нпл (фиг. 3) кривизны в недеформированном положении захвата соизмерима с высотой поперечного прогиба пластины при воздействии на нее толкателя. Центральная часть 5 пластины 1 также может иметь поперечную кривизину Ьз (фиг. 2), распространяющуюся в распрямленном положении плеча 3 на линию перегиба 7. Центральная часть 5 пластины 1 установлена одной кромкой в неподвжном корпусе 11, а противоположной кромкой - в поступательно движущемся толкателе 4. Захватное устройство работает следующим образом.
При поступательном перемещении S толкателя 4 в направлении поперечного сжатия центральной части 5 пластины в последней появляется поперечный упругий прогиб h. Волна упругой поперечной деформации распространяется к линиям перегиба 6 и 7 свободных плеч 2 и 3, где в результате перераспределения напряжений поперечного изгиба появляются крутильные напряжения. Они вызывают noBOpot плеч 2 и 3 соответственно на угол ai и PI отноительно начального положения I (тонкие линии, фиг. 1 и 2). Захватное устройство с повернутыми на углы «1 и PI плечами 2 и 3 подводится к детали 12. При отходе толкателя 4 плечи зажимают деталь под действием упругих сил. При возврате толкателя 4 в исходное положение после поджима плечи 2 и 3 стремятся занять свое исходное положение (фиг. 2). Данный диапазон работы захвата реализуется при ходе толкателя на величину Si, когда прогиб h не превышает величины hi. Такой прогиб является достаточным для распрямления перегибов 6 и 7, при котором сохраняется подобие формы упругой пластины 1 относительно исходной.
В указанном первом диапазоне работы
зажимаются детали длиной, соизмеримой расстоянию t между плечами 2 и 3.
Работа захватного устройства во втором
диапазоне происходит следующим образом. При ходе толкателя 4 на расстояние больще Si центральная часть 5 прогибается на величину hi h h2 (фиг. 6). Прогиб центральной части в пределах обеспечивает полное распрямление перегибов
6 и 7 и поворот плеч 2 и 3 соответственно на углы а2 и р2 (фиг. 4). При обратном ходе толкателя 4 плечо 2 занимает исходное положение, а плечо 3 изменяет свою форму, т.е. перегиб 7 остается распрямленным. При
следующем ходе толкателя угловое перемещение получает лищь часть плеча 3, расположенная за перегибом 10. Фиксация формы распрямленного плеча 3 происходит за счет того, что прогиб h центральной части пластины в пределах hi h hz становится соизмеримым с высотой Ьз поперечной кривизны плеча, а также благодаря тому, что волна упругой поперечной деформации при ходе толкателя 4 на сжатие на величину S2 полностью распрямляет перегиб 7.
В этом втором диапазоне зажимаются более длинньсе детали.
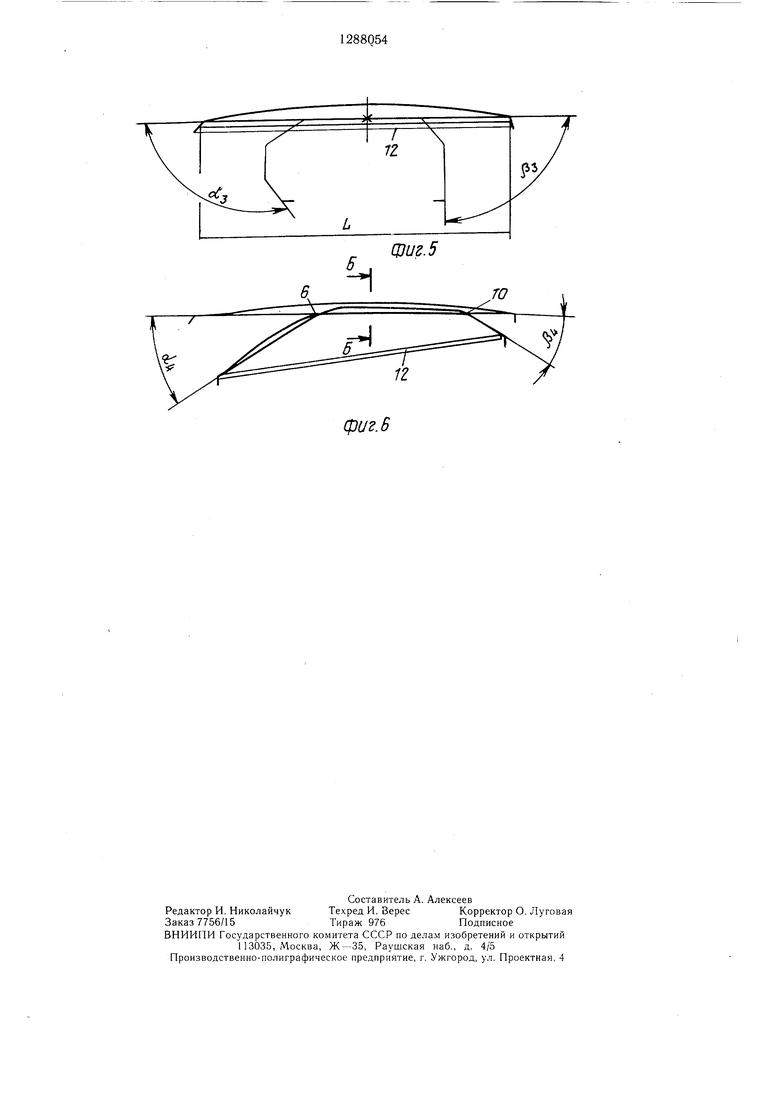
Третий диапазон работы захватного устройства реализуется при предельных перемещениях толкателя 4 в направлении сжатия центральной части до величины S4 Sa и
прогибе h4 hs. В этом случае волна поперечной деформации, распространяясь по упругой пластине и образуя в перегибах крутильные напряжения, полностью выпрямляет их (фиг. 5) и поворачивает плечи 2 и 3 на углы аз и Рз. Силы накопленной энергии деформации позволяют в этом диапазоне работы захватного устройства зажимать максимальные по длине детали длиной L с максимальным усилием.
Снятие поперечной нагрузки с центральной части 5 при отводе толкателя 4 соответствует распрямленным плечам 2 и 3, отклоненным соответственно на углы аи и (54 (фиг. 6). В этом положении захватное устройство работает в состоянии памяти механической, т.е. зажимать детали распрямленными плечами. Повторное периодическое нагружение центральной части 5 толкателем 4 в направлении ее сжатия в данном диапазоне работы приводит к качательным движениям в пределах углов а, и р4 распрямленных плеч, что бывает необходимо
при регулировке зажима в зависимости от типоразмера зажимаемой детали.
Формула изобретения
Захватное устройство, содержащее П-об- разную изогнутую упругую пластину и толкатель с приводом, расположенный поперек центральной закрепленной на корпусе части упругой пластины, отличающееся тем, что, с
целью расширения технологических возможностей, свободные плечи упругой П-образ- ной пластины выполнены с дополнительным перегибом в средней части, причем по крайней мере одно из плеч выполнено с поперечной кривизной, величина радиуса кривизны которой не больше величины радиуса кривизны центральной части упругой пластины, соответствующего распрямленному положению плеча.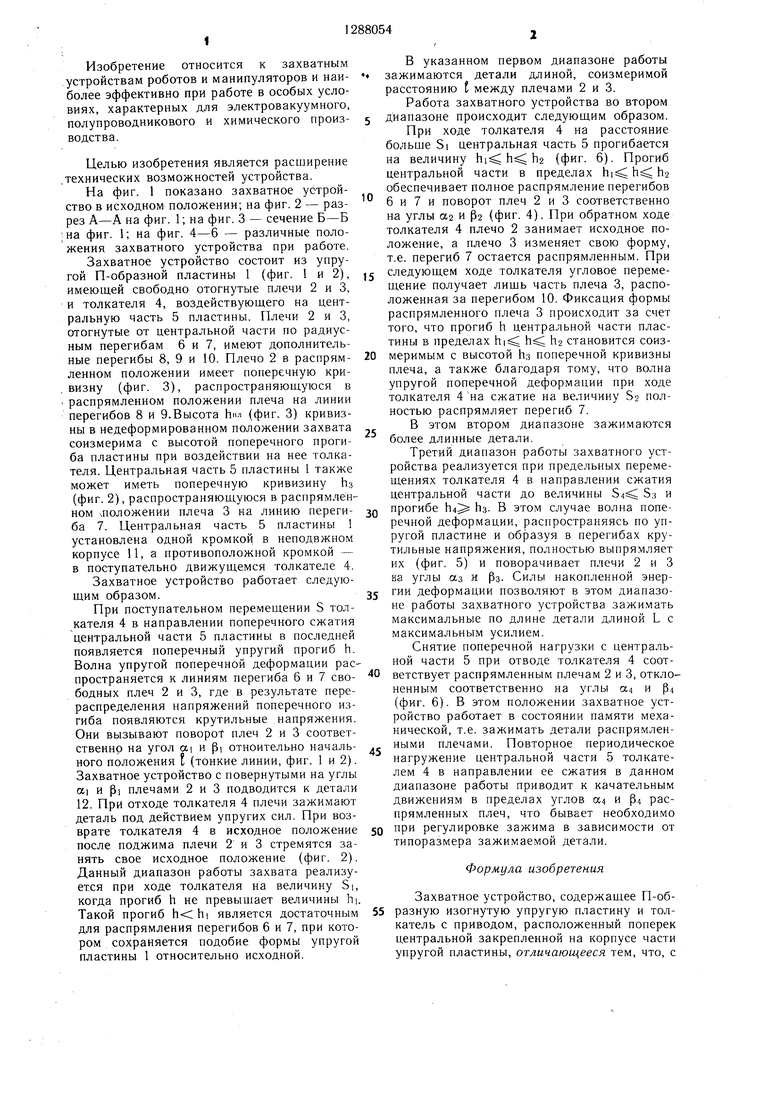
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1989 |
|
SU1622281A2 |
| Держатель катушки к намоточному станку | 1982 |
|
SU1053171A1 |
| Мембранный механизм | 1985 |
|
SU1298457A1 |
| Захват | 1986 |
|
SU1360961A2 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 2017 |
|
RU2667401C1 |
| Упругий механизм | 1981 |
|
SU976156A1 |
| Заслонка | 1979 |
|
SU732608A1 |
| Схват | 1990 |
|
SU1796452A1 |
| УПРУГОДЕФОРМИРУЕМЫЙ СХВАТ | 2007 |
|
RU2352452C1 |
| УПРУГОДЕФОРМИРУЕМЫЙ СХВАТ | 2013 |
|
RU2564802C2 |
Изобретение относится к захватным устройствам роботов и манипуляторов электровакуумного, полупроводникового и химического производства. Целью изобретения является расширение технологических возможностей. При поступательном перемещении толкателя в направлении поперечного сжатия центральной части 5 П-образной упругой пластины 1 в ней появляется поперечный прогиб. Волна упругой деформации распространяется к линиям перегиба 6 и 7 свободных плеч 2 и 3, которые в результате перераспределения напряжений вызывают поворот плеч 2 и 3 относительно начального положения. Захватное устройство в таком положении подводится к детали. При отходе толкателя плечи 2 и 3 зажимают деталь под действием упругих сил. При увеличении хода толкателя плечи 2 и 3 в местах перегибов 6 и 7 полностью распрямляются и зажим детали происходит за счет изгиба пластины в местах дополнительного перегиба 10, в этом положении перегиб 7 остается распрямленным. При дальнейшем увеличении хода толкателя захват детали будет осуществляться полностью распрямленными свободными плечами 2 и 3. 6 ил. i сл Ю оо 00 о сд 4 ф1/г.
Фиг. 2
6-6
пл
фиг.З
ери 2.
фиг. 6
| Захват | 1977 |
|
SU715284A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
