Предлагаемое изобретение относится к роботостроению, к устройствам для зажима деталей, более конкретно, к схватам промышленных роботов и манипуляторов.
Известны схваты, содержащие упругую рабочую часть с отогнутыми от нее плечами, привод и толкатель, расположенный в одной плоскости с центральной рабочей частью [1-3]. Обладая простотой конструкции, быстродействием и минимальной металлоемкостью, они имеют ограничения по весу, габаритам и форме захватываемых деталей, например, не удобны для удержания деталей треугольной или круглой формы.
Техническим результатом предлагаемой конструкции является разнообразие форм, увеличение веса и размеров захватываемых деталей при тех же габаритах устройства. Это достигается выполнением рабочей части лучеобразной формы, например, крестообразной и установкой толкателя привода по центру перпендикулярно к ней. Для улучшения технологичности рабочая часть выполняется из двух и более упругих элементов с плечами, наложенных один на другой и развернутых на определенный угол.
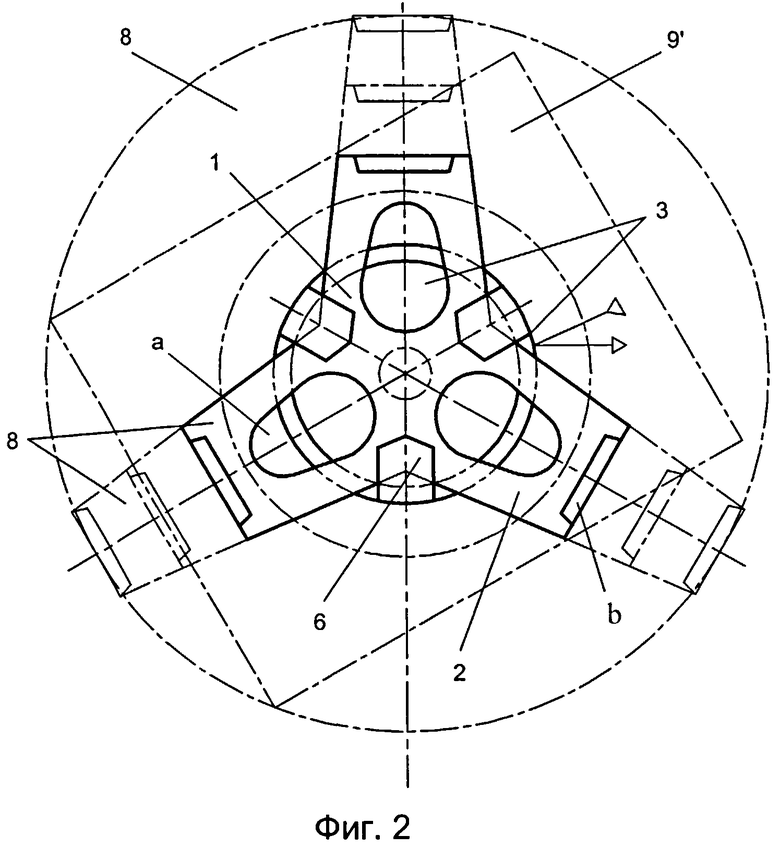
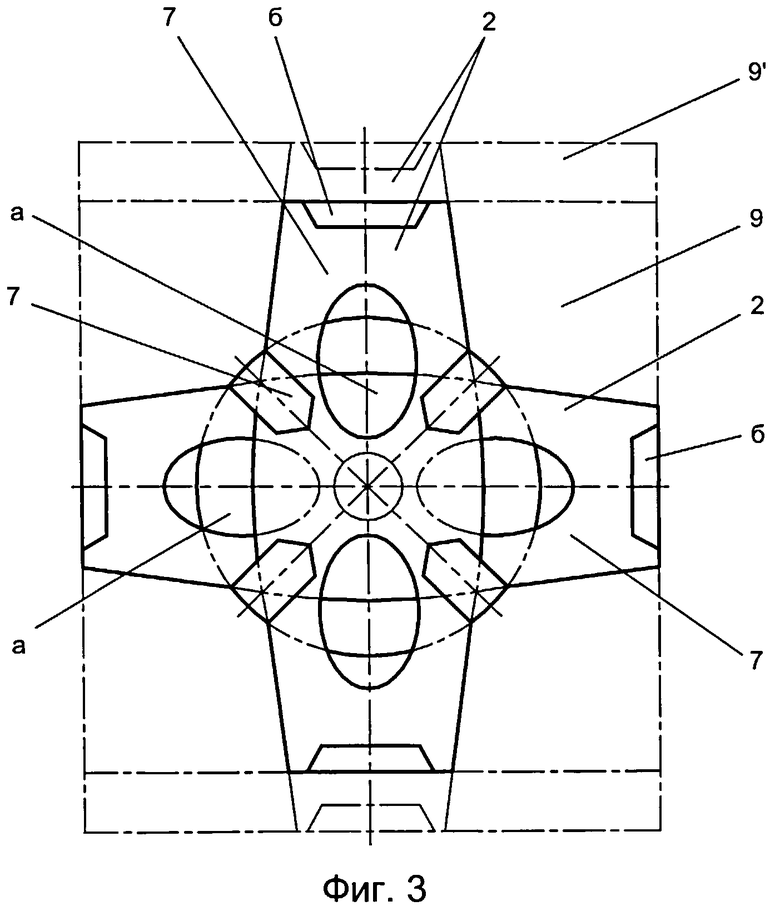
На фиг.1 изображен трехлучевой схват, продольный разрез; на фиг.2 - то же, вид снизу; на фиг.3 - четырехлучевой схват, вид снизу; штрих-пунктиром обозначены рабочее положение элементов схвата и удерживаемые им детали.
Упругодеформируемый схват содержит рабочую часть 1, образованную упругими элементами с отогнутыми плечами 2; корпус 3; пневмо- или гидропривод с поршнем 4, шток 5 которого является толкателем и установлен по центру рабочей части перпендикулярно к ней (фиг.1, 2). Возможен и другой вид привода: механический, электромагнитный. Рабочая часть выполнена лучеобразной, в рассматриваемом примере - трехлучевой, и опирается на выступы 6 держателей корпуса. Лучи упругого элемента имеют окна «a» в центральной части для увеличения ее прогиба и угла поворота плеч. Отбортовки «b» плеч служат для удержания деталей. Выступы 6 держателей имеют вогнутую поверхность «c», сопрягаемую с прогибами лучей (см. фиг.3).
По другому варианту исполнения рабочая часть состоит из двух, реже трех П- или Г- образных упругих элементов 7, наложенных один на другой и развернутых на определенный угол, в конкретном примере - на 90° (фиг.3). Крестообразная форма схвата удобна для удержания многогранных деталей.
Схват работает следующим образом. При подаче воздуха в пневмоцилиндр поршень 4 смещается в направлении S и выдвигает толкатель 5 на величину 1. Толкатель прогибает упругую рабочую часть 1 в центральной ее области. Напряжения деформации поворачивают плечи 2, и концы их расходятся (см. штрих-пунктир). Схват с повернутыми плечами подводится к детали 8 или 9. При ходе толкателя 5 назад плечи 2 сходятся до упора в деталь и зажимают ее, опирающуюся на отбортовки плеч «b». Рука робота переносит схват в рабочую позицию. Там пневмоцилиндр снова выдвигает толкатель, и плечи расходятся, отпуская деталь.
Трехлучевой схват надежно зажимает круглые детали типа фланца 8 или треугольной формы, но способен переносить детали других форм, например, прямоугольной - 91. Четырехлучевой схват предназначается для переноса листов, преимущественно квадратных 9 или прямоугольных 91, и пригоден для деталей полигональной формы. Разница в их размерах по направлениям лучей компенсируется упругостью плеч.
Упругодеформируемые схваты отличаются предельной простотой и минимальным весом, в 100-300 раз меньше шарнирно-рычажных конструкций. Минимальные габариты обеспечивают компактность при хранении. В одной кассете толщиной 80-100 мм может находиться библиотека до 30 единиц различных модификаций схватов. Их предельная простота и быстросменность в руке робота делают выгодным даже разовое применение. Отсутствие кинематических пар в плечах гарантирует высокую надежность работы схватов в вакууме, агрессивных и запыленных средах. Схваты являются широкоходовыми и могут удерживать детали в большом диапазоне размеров.
Источники информации
1. AС СССР 715284, B23Q 3/06. Захват. 1980.
2. АС СССР 1360961, B23Q 30/06, B25J 15/00. Захват. 1987.
3. АС СССР 1796452, B25J 15/00. Схват. 1993. Прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| УПРУГОДЕФОРМИРУЕМЫЙ СХВАТ | 2007 |
|
RU2352452C1 |
| УПРУГОДЕФОРМИРУЕМЫЙ СХВАТ | 2008 |
|
RU2374065C1 |
| Схват | 1990 |
|
SU1796452A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 2017 |
|
RU2667401C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 2018 |
|
RU2673118C1 |
| ВАКУУМНЫЙ ЗАХВАТНЫЙ КОРРЕКТИРУЮЩИЙ МОДУЛЬ | 2009 |
|
RU2431561C2 |
| Устройство для сборки бесфасочных пазовых соединений | 1982 |
|
SU1088911A1 |
| Схват | 1983 |
|
SU1126433A1 |
| Захватное устройство манипулятора с рабочим элементом из электропроводящего гибкого углеродного материала | 2020 |
|
RU2743441C1 |
| Схват манипулятора | 1980 |
|
SU905064A1 |
Изобретение относится к роботостроению, а именно к схватам промышленных роботов и манипуляторов. Упругодеформируемый схват содержит рабочую часть, образованную упругими элементами с отогнутыми плечами с отбортовками, корпус с приводом и толкатель. Корпус снабжен держателями с выступами, на которые опирается рабочая часть. При этом рабочая часть выполнена лучеобразной формы, а толкатель установлен по центру рабочей части и перпендикулярно к ней. В частности, рабочая часть образована из двух или трех П- или Г-образных упругих элементов, наложенных один на другой и развернутых на угол, например, 90°. Изобретение обеспечивает зажим деталей разнообразной формы в широком диапазоне веса и размеров захватываемых деталей. 1 з.п. ф-лы. 3 ил.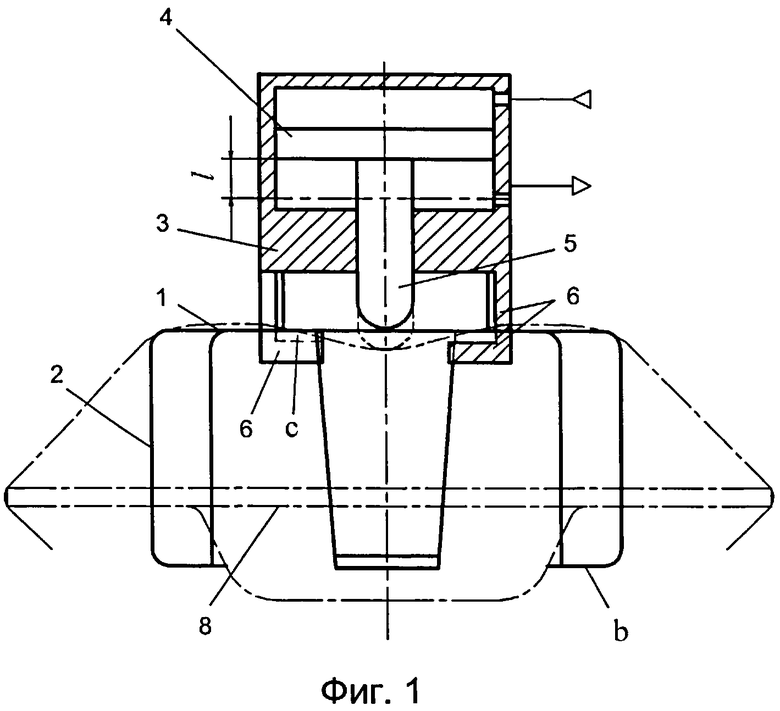
1. Упругодеформируемый схват, содержащий рабочую часть, образованную упругими элементами с отогнутыми плечами с отбортовками, корпус с приводом и толкатель, отличающийся тем, что корпус снабжен держателями с выступами, на которые опирается рабочая часть, при этом рабочая часть выполнена лучеобразной формы, а толкатель установлен по центру рабочей части и перпендикулярно к ней.
2. Схват по п. 1, отличающийся тем, что рабочая часть образована из двух или трех П- или Г-образных упругих элементов, наложенных один на другой и развернутых на угол, в частности, 90°.
| УПРУГОДЕФОРМИРУЕМЫЙ СХВАТ | 2008 |
|
RU2374065C1 |
| Схват | 1990 |
|
SU1796452A1 |
| УПРУГОДЕФОРМИРУЕМЫЙ СХВАТ | 2007 |
|
RU2352452C1 |
| Захват | 1986 |
|
SU1360961A2 |
| RU 2055725 C1, 10.03.1996 | |||
| Захват | 1977 |
|
SU715284A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |

