Предлагаемое изобретение относится к устройствам для зажима деталей, более конкретно - к схватам промышленных роботов и манипуляторов.
Известен захват, содержащий центральную рабочую часть и отогнутые от нее плечи, толкатель с приводом возвратно-поступательного движения. Он обеспечивает захват и передачу в позицию только одной детали [1].
Известен также захват, имеющий в центральной части корсет, расширяющий диапазон ходов плеч и сил зажима [2]. Он способен удерживать только одну деталь.
Прототипом является схват, который в центральной части имеет дополнительные плечи с противоположных сторон к основным [3]. Этот схват способен удерживать две детали с противоположных сторон центральной приводной части. Ему присущ недостаток - необходимость поворота на 180° для установки деталей на одну плоскость.
Техническим результатом предлагаемого схвата является захват и удержание двух различных деталей с одной стороны центральной рабочей части. Это упрощает позиционирование деталей в местах установки. Кроме того, при уменьшении числа плеч данный схват позволяет изменять размеры удерживаемых деталей.
Это достигается тем, что в центральной части схвата в одном направлении с плечами установлена, по крайней мере, одна упругая стенка, а толкатель снабжен вилкой, воздействующей на рабочие участки схвата от упомянутой стенки до соответствующего плеча.
Стенка имеет полки на уровне концов плеч и отогнутую под прямым углом полосу с отбортовками по краям, надетыми на центральную часть схвата. Толкатель с приводом установлен в направляющей, имеющей ось поворота, расположенную перпендикулярно к направлению хода толкателя.
Предлагаемое изобретение поясняется чертежами, на которых фиг.1 изображает общий вид схвата в пространстве, фиг.2 - продольный разрез схвата, фиг.3 - вид сверху на фиг.2, фиг.4 - вид А на фиг.3.
Упругодеформируемый схват, установленный в держателе 1 руки робота, выполнен из тонкой пластины и содержит центральную рабочую часть 2, отогнутые от нее плечи 3 и 4 и между ними упругую стенку 5 (фиг.1-3).
Центральная часть схвата поджата к держателю 1 в опорах "0" толкателем 6 через вилку 7, воздействующую на рабочие участки: "а" от плеча 3 до стенки 5 и "б" от стенки до плеча 4. Стенка крепится к центральной части жестко или с возможностью перестановки. В последнем случае она имеет отогнутую под прямым углом полосу 8 с отбортовками 9 по краям (фиг.1-4). Отбортовки надеваются на центральную часть и удерживают на ней стенку 5. Для удержания деталей стенка имеет полки 10 и 11 на уровне плеч 3 и 4 соответственно.
Толкатель 6 получает возвратно-поступательное движение от пневмоцилиндра 12 (фиг.3, 4). Возможны другие исполнения привода, рациональные для конкретного робота или манипулятора. Толкатель с приводом установлен в направляющей 13, имеющей ось поворота 14, расположенную перпендикулярно к направлению хода толкателя (см. фиг.3, 4).
Схват работает следующим образом. При поступательном перемещении S толкателя 6 от пневмоцилиндра 12 в направлении к держателю 1 центральная рабочая часть 2 прогибается. За счет упругого прогиба рабочих участков "а" и "б" плечи 3 и 4 расходятся (фиг.1 и 2 тонкие линии).
Рука робота подводит схват к позициям деталей 15 и 16. Детали заходят в открытые зевы рабочих участков, а затем зажимаются плечами 3 и 4 при отходе толкателя 6. Рука переносит схват с зажатыми деталями в позицию обработки, и цикл повторяется.
Для переналадки на другие размеры деталей стенка 5 передвигается вдоль центральной части. При необходимости захвата одной детали толкатель 6 поворачивается вместе с направляющей 13 вокруг оси 14 на угол θ, обеспечивающий контакт одного конца вилки 7 с заданным рабочим участком в одной из опор 0. Наибольшая длина захватываемой детали соответствует расстоянию между плечами. С этой целью стенка сдвигается вплотную к одному из плеч, и положение ее полок соответствует высоте детали.
Таким образом, установка одной или нескольких упругих стенок позволяет использовать схват в многономенклатурном и быстропереналаживаемом назначении, то есть одновременно брать несколько различных деталей и последовательно раздавать их в позиции обработки или работать с отдельными деталями единичного производства.
Источники информации
1. Авторское свидетельство СССР №865597, МПК B23Q 3/06. Захват. Бюл. №35, 1981 г.
2. Авторское свидетельство СССР №1360961, МПК B25Q 3/06. Захват. 1987 г.
3. Авторское свидетельство СССР №1796452, МПК B25J 15/00. Схват. Бюл. №7, 1993 г. Прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| УПРУГОДЕФОРМИРУЕМЫЙ СХВАТ | 2008 |
|
RU2374065C1 |
| УПРУГОДЕФОРМИРУЕМЫЙ СХВАТ | 2013 |
|
RU2564802C2 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 2017 |
|
RU2667401C1 |
| Схват | 1990 |
|
SU1796452A1 |
| Захват | 1986 |
|
SU1360961A2 |
| Захватное устройство | 1985 |
|
SU1288054A1 |
| Захватное устройство | 1989 |
|
SU1622281A2 |
| Захват | 1977 |
|
SU715284A1 |
| Схват робота | 1987 |
|
SU1465313A1 |
| Автоматизированный комплекс для штамповки | 1985 |
|
SU1291253A1 |
Изобретение относится к схватам промышленных роботов и манипуляторов. Схват выполнен в виде упругой пластины, содержащей центральную рабочую часть и отогнутые от нее плечи, и толкателя с приводом возвратно-поступательного движения, поджимающего центральную рабочую часть к держателю схвата с возможностью ее прогиба. Толкатель снабжен вилкой, воздействующей на рабочие участки от стенки до соответствующего плеча. В центральной части в одном направлении с плечами установлена, по крайней мере, одна упругая стенка. Стенка имеет отогнутую под прямым углом полосу с отбортовками по краям, надетыми на центральную часть, и полки для удержания захватываемых деталей на уровне концов плеч, направленные к соответствующим плечам. Изобретение позволит захватывать и удерживать несколько различных деталей с одной стороны центральной рабочей части, и имеет возможность быстрого переналаживания. 3 з.п. ф-лы, 4 ил.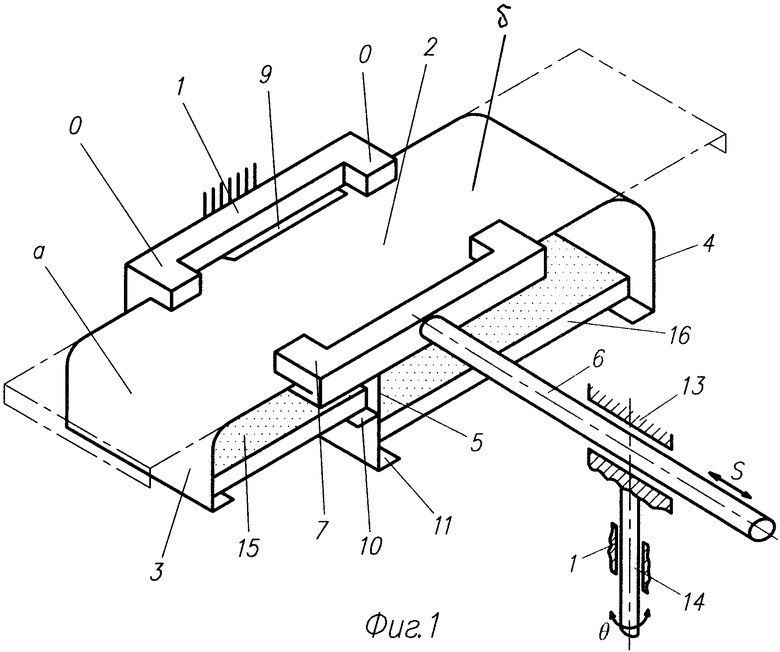
1. Упругодеформируемый тонкостенный схват, выполненный в виде упругой пластины, содержащей центральную рабочую часть и отогнутые от нее плечи, и толкателя с приводом возвратно-поступательного движения, поджимающего центральную рабочую часть к держателю схвата с возможностью ее прогиба, отличающийся тем, что в центральной части в одном направлении с плечами установлена, по крайней мере, одна упругая стенка, а толкатель снабжен вилкой, воздействующей на рабочие участки от стенки до соответствующего плеча.
2. Схват по п.1, отличающийся тем, что стенка имеет отогнутую под прямым углом полосу с отбортовками по краям, надетыми на центральную часть.
3. Схват по п.1, отличающийся тем, что стенка имеет полки для удержания захватываемых деталей на уровне концов плеч, направленные к соответствующим плечам.
4. Схват по п.1, отличающийся тем, что толкатель с приводом установлен в направляющей, имеющей ось поворота, расположенную перпендикулярно к направлению хода толкателя.
| Схват | 1990 |
|
SU1796452A1 |
| Захватное устройство | 1985 |
|
SU1288054A1 |
| Захват | 1986 |
|
SU1360961A2 |
| Захват | 1979 |
|
SU865597A2 |
| ПРИВОД ПЕРЕМЕЩЕНИЯ И СХВАТ | 2002 |
|
RU2215198C1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |

