Изобретение относится к области машиностроения, а именно к захватным устройствам манипуляторов и промышленных роботов, и является усовершенствованием изобретения по авт. св. № 715284.
Цель изобретения - расширение технологических возможностей путем регулирования усилия зажима.
На чертеже изображен захват, обш,ий вид.
Захват содержит корпус 1, несуш,ую пластину 2 П-образной формы, имеюшую рабочие плечи 3 для удержания деталей, и пластинчатые вставки 4 и 5 П-образной формы, придаюш,ие захвату определенную жесткость
Несущая пластина 2 и вставки 4 и 5 расположены между неподвижной стенкой 6 корпуса 1 и толкателем 7. Крепление несушей пластины 2 и пластинчатых вставок 4 и 5 в неподвижной стенке бив толкателе 7 осу- шествляется в шарнирных опорах. Исходное положение захвата на чертежах обозначено толстыми основными линиями.
Захват работает следуюш.им образом.
При поступательном перемешении толкателя 7 в направлении к неподвижной стенке 6 происходит прогиб в центральных частях
Составитель А, Чернышев Техред И. ВересКорректор И. Эрдейи
Тираж 786Подписное
ВНИИПИ Государственного комитета СССР по де.лам изобретений и открытий
1 13035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
несушей пластины 2 и пластинчатых вставок 4 и 5. За счет этого упругого прогиба несушая пластина 2 и пластинчатые вставки 4 и 5 принимают новую упругую форму (тонкие линии), при которой рабочие плечи 3 раздвигаются. Захват подводится к детали 8. При возврате толкателя 7 в исходное положение рабочие плечи 3 зажимают деталь 8. Сила зажима детали определяется энергией, деформации несущей пластины 2 и пластинча- Tkx вставок 4 и 5. Установка и снятие пластинчатых вставок 4 и 5 позволяет в широких пределах производить регулировку жесткости захвата.
Формула изобретения Захват по авт. св. № 715284, отличающийся тем, что, с целью расширения технологических возможностей путем регулирования усилия зажима, он снабжен по крайней мере одной П-образной пластинчатой вставкой, центральная часть которой сопрягается с рабочими плечами по большему радиусу, чем у несущей пластины, при этом вставка расположена с наружной стороны несущей пластины с возможностью взаимодействия с ней.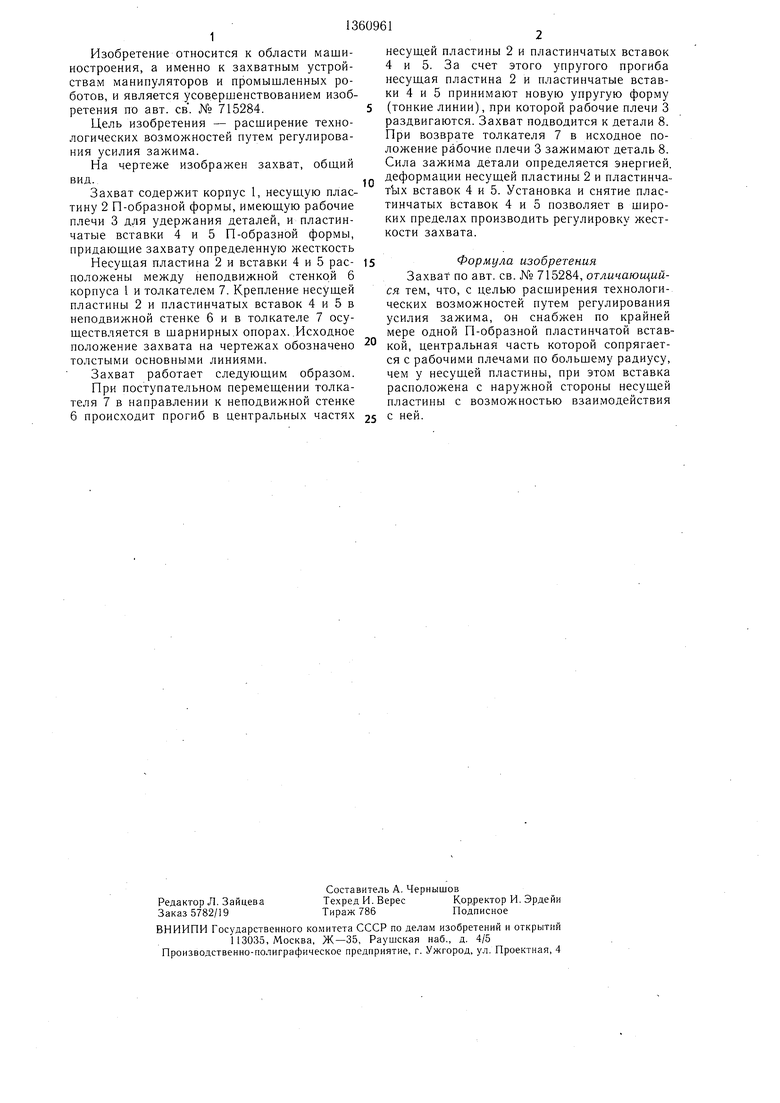
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1985 |
|
SU1288054A1 |
| Схват | 1990 |
|
SU1796452A1 |
| УПРУГОДЕФОРМИРУЕМЫЙ СХВАТ | 2013 |
|
RU2564802C2 |
| УПРУГОДЕФОРМИРУЕМЫЙ СХВАТ | 2007 |
|
RU2352452C1 |
| УПРУГОДЕФОРМИРУЕМЫЙ СХВАТ | 2008 |
|
RU2374065C1 |
| Кисть манипулятора | 1987 |
|
SU1423372A1 |
| Захватное устройство манипулятора | 1987 |
|
SU1521581A1 |
| Захватное устройство | 1990 |
|
SU1787760A1 |
| Групповой схват | 1985 |
|
SU1311926A1 |
| Захватное устройство | 1989 |
|
SU1710339A1 |
Изобретение относится к машиностроению, а именно к захватным устройствам манипуляторов и промышленных роботов. Целью изобретения является расширение технологических возможностей путем регулирования усилия зажима. Схват содержит корпус 1, несуший пла :тину 2 П-образной формы, имеющую рабочие плечи 3 для удержания деталей, и пластинчатые вставки 4 и 5 ,П-образной формы, позволяюндие менять силу зажима деталей за счет изменения жесткости захвата. При поступательном переме- ш,ении толкателя 7 в направлении неподвижной стяжки 6 происходит прогиб в центральных частях несушей пластины 2 и пластинчатые вставки 4 и 5 принимают новую упругую фор.му, при которой рабочие плечи 3 раздвигаются. Сила зажима детали определяется энергией деформации несушей пластины 2 и пластинчатых вставок 4 и 5. Установка и снятие последних позволяют в широких пределах регулировать жесткость захвата. 1 ил. (Л со с: о со 7 NO
| Захват | 1977 |
|
SU715284A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
