Настоящее изобретение отиосится к устройствам для программного управления набором координат, состоящим из цифрового задатчика и приводного электродвигателя, управляемого напряжением рассогласования между задатчиком и датчиками положения. Задатчик выполняется в виде сопротивлений или регулируемых источников напряжения. При этом число цепей задатчика равно числу разрядов потенциометрических или автотрансформаторных датчиков положения, подключенных к ним и соединенных между собой повышающими механическими передачами.
Предлагаемое устройство отличается от известных тем, что на каж.цый датчик подано напряжение дополнительного источника тока для создания сдвига нуля датчика на половину начального деления датчика.
Такое выполнение устройства позволяет предотвратить его работу в точке разрыва.
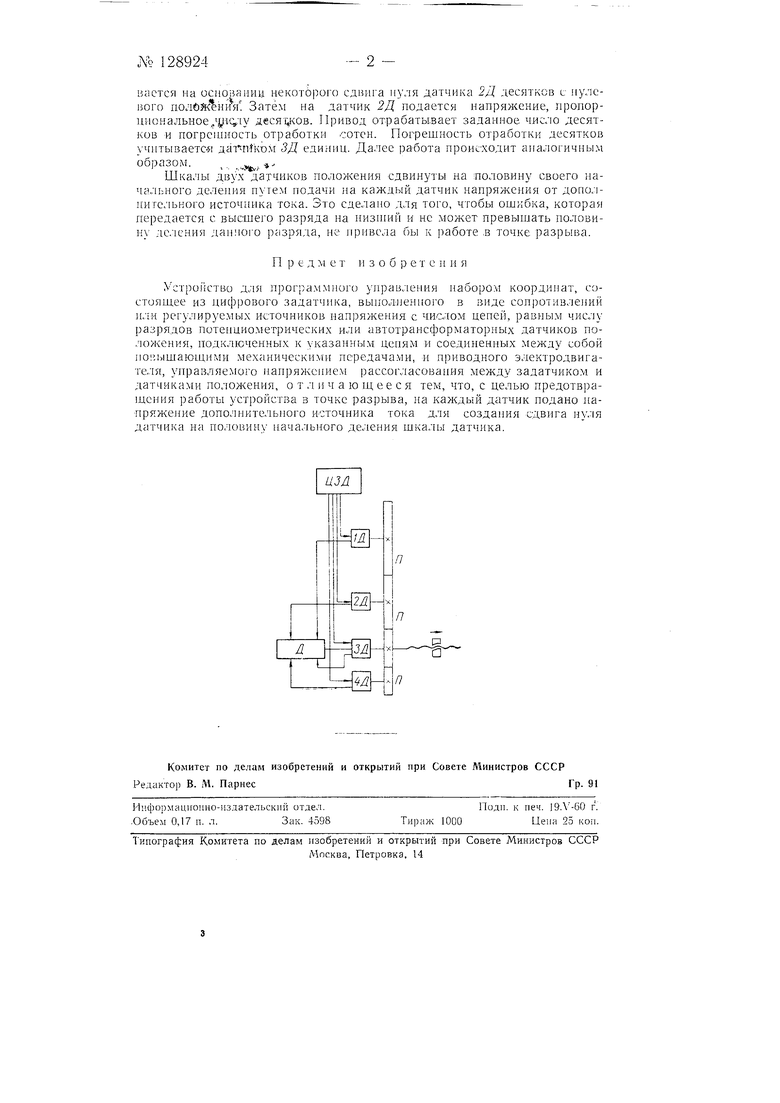
На чертеже изображена принципиальная схема предлагаемого устройства.
Устройство содержит цифровой задатчик ЦЗД, потенциометрические или автотрансформаторные датчики положения }Д, 2Д, ЗД и 4Д, подключенные к выходным цепям задатчика и соединенные между собой повышающими механическими передачами П, и приводной электродвигатель Д, управляемый напряжением рассогласования 1между задатчиком и датчиками. Задатчик ЦЗД выполнен в виде ряда сопротивлений или регулируемых цепей, число которых равно числу разрядов датчиков положения.
Предлагаемое устройство действует следующим образом. На датчик /Л поступает напряжение, пропорциональное числу сотен в набираемой координате. Привод отрабатывает координату до тех пор, пока напряжение рассогласования не станет равным нулю. Ошибка отработки учитывлстся на основании некоторого сдвига нуля датчика 2Д десятков с нулевого riojit) Затем на датчик 2Д иодается напряжение, пропорциональное ,yi4fiy деся1,ков. Привод отрабатывает заданное чис.то десятков и потреипюсть отработки сотен. Погрешность отработки десятков учнтываетс-я датчгГком ЗД единиц. Да.тее работа происходит аналогичным образом. . .,..
Шкалы двух датчиков положения сдвинуты на половину своего начального деления путем подачи на каждый датчик напряжения от допо;:иите.чьного источника тока. Это сделано для того, чтобы огиибка, которая передается с высшего разряда на низншй и не может превышать половину де.тсния данного разряда, не нрнвела бы к работе ,в точке разрыва.
Пред м е т и з о б р е т е и и я
Устройство д;1Я программного управ.тения набором координат, состоящее из цифрового задатчика, выполненного в виде сопротивлений п.ли регулируемых источников напряжения с числом цепей, равным числу разрядов потенциометрических или автотрансформаторных датчиков положения, подключенных к указанным цепям и соединенных между собой ио;.1:,1шаюи1ими механическими передачами, и приводного электродвигателя, управляемого нанряжеиием раесогласовання между задатчиком и датчиками положения, о т : и чающееся тем, что, с целью предотвращения работы устройства в точке разрыва, на каждый датчик подано напряжение дополиительиого источника тока для создания сдвига ну.:|я датчика на по.товнну начального деления шкалы датчика.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения угла поворота вала | 1959 |
|
SU127306A1 |
| Устройство для электрического деления шага | 1959 |
|
SU147949A1 |
| Устройство для автоматического включения сигнала по достижении счетчиком определенного числа | 1959 |
|
SU131147A1 |
| Устройство для измерения угла поворота вала | 1957 |
|
SU126930A1 |
| Программное устройство | 1959 |
|
SU122797A1 |
| Устройство управления гелиостатом | 1983 |
|
SU1291925A1 |
| Полуавтоматический сверлильный станок с программным управлением для линейного сверления отверстий с постоянным шагом в деталях типа судовых стрингеров | 1960 |
|
SU134956A1 |
| Аналого-цифровой регулятор тока | 1979 |
|
SU864242A1 |
| Электропривод постоянного тока | 1991 |
|
SU1815785A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
