Изобретение относится к сельскохозяйственному машиностроению, в частности к устройствам для нагружения рабочих органов преимущественно широкозахватных агрегатов, и может быть использовано при их регулировке для моделирования тягового сопротивления рабочих органов.
Цель изобретения - повышение точности регулировки.
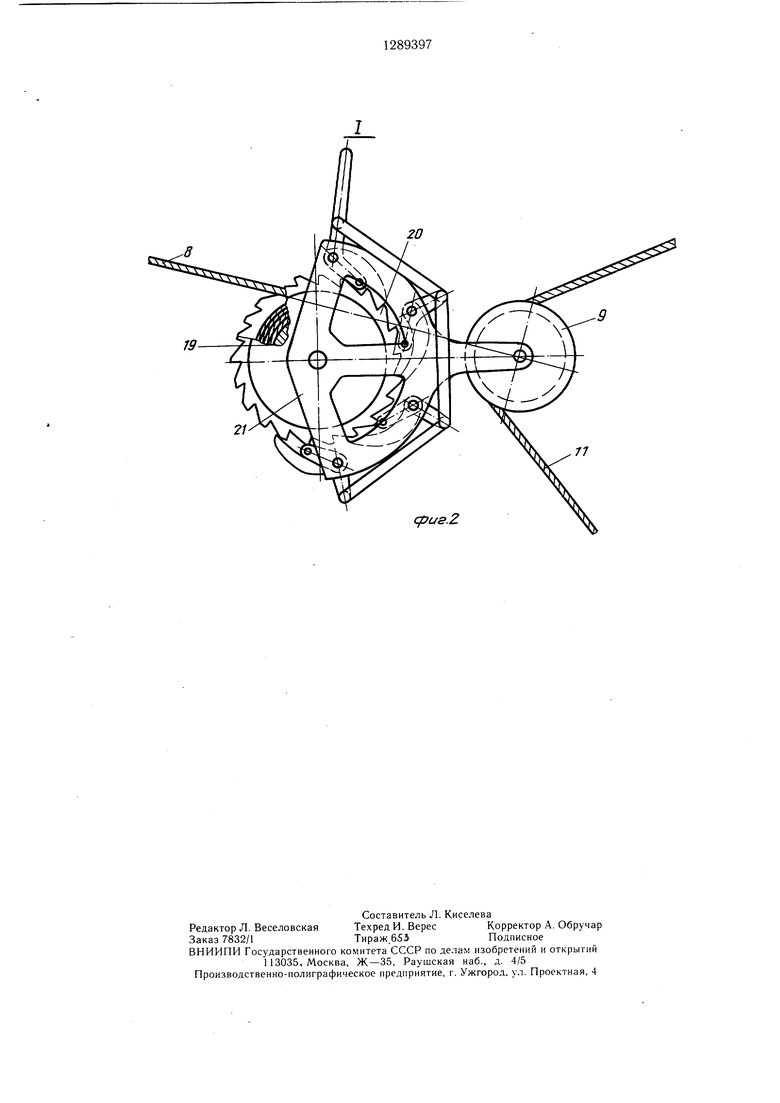
На фиг. I показано устройство для на- гружения, вид в плане; на фиг. 2 - узел I на фиг. 1.
Устройство содержит подъемную йлат- форму 1 для трактора 2, настроечную пло- ш,адку 3 для установки орудия 4 опорными колесами 5 на подставки 6 высотой, равной глубине обработки почвы.
Рабочие органы 7 орудия 4 посредством тяг 8 связаны с подвижными блоками 9.
Через подвижные 9 и неподвижные 10 блоки пропупден канат 11, один конец которого через блок 12 с динамометром 13 связан с лебедкой 14, а другой конец прикреплен к грузу 15 через блок 16, закрепленный на стойке 17.
Неподвижные блоки 10 закреплены поперек настроечной плош,адки 3 в пазу попе- речной балки 18.
Для регулирования взаимного положения блоков 9 и 10 в поперечном направлении последние установлены в пазах балки 18 с возможностью перемеш,ений друг относительно друга.
Для регулирования взаимного положения блоков 9 и 10 в продольном направлении тяги-8, связанные с блоками 9, выполнены регулируемой длины, для чего тяга навита на барабан 19 с храповым механиз- мом 20.
Для замера угла обхвата блоков 9 канатом 11 служит угломер 21.
Устройство работает следующим образом.
Агрегат переводят в рабочее положение за счет подъе1ма трактора 2 с платформой 1 относительно настроечной площадки 3 на заданную глубину обработки почвы и установки орудия 4 опорными колесами 5 на настроечную площадку 3 через подставки 6. Механизмом подъема и опускания орудия (не показан) доводят рабочие органы 7 до соприкосновения с поверхностью настроечной площадки 3 и предварительно устанавливают режущие кромки параллельно этой поверхности. Расставляют неподвижные блоки 10 между нагружаемыми рабочими органами 7, т. е. симметрично им, и закрепляют в пазах поперечной балки 18. Распределяют по ширине площадки 3 с предварительно пропущенным через них канатом 11 подвижные блоки 9 и тягами 8 соединяют их с на- груж аемыми рабочими органами 7 орудия 4, освободив собачки храпового механизма 20 из зацепления с храповым колесом.
Лебедкой 14 устанавливают груз 15 у поверхности площадки 3, базируют на ось подвижного блока 9 угломер 21, и, вращая вал барабана 19, последовательно устанавливают заданный угол обхвата для каждого подвижного блока 9 канатом по тариро- вочной таблице. Затем лебедкой 14 выбирают свободную длину каната 11 до прижатия груза 15 к упору стой.ки 17 и производят нагружение всех или группы рабочих органов в один прием до получения заданной силы натяжения каната 11 по динамо.метру 13. После этого проверяют положение режущих кромок рабочих органов 7 и при необходимости регулируют их. По окончании регулировки нагрузка одновременно снимается лебедкой со всех рабочих органов.
Формула изобретения
1.Устройство для нагружения почвообрабатывающих рабочих органов при их регулировке, содержащее подъемную платформу, настроечную площадку и механизм нагружения, отличающееся те.м, что, с целью повышения точности регулировки, механизм нагружения выполнен в виде систе.мы блоков и пропущенного через них каната, один конец которого связан с лебедкой, а на другом его конце закреплен груз, при этом система блоков состоит из подвижных блоков, каждый из которых посредством тяги связан с рабочим органом, и из установленных в чередующемся порядке с подвижными блоками неподвижных блоков, которые закреплены поперек настроечной площадки с возможностью поперечных перемещений относительно тяг.
2.Устройство по п. 1, отличающееся тем, что тяги выполнены регулируемой длины.
2/
cpue.Z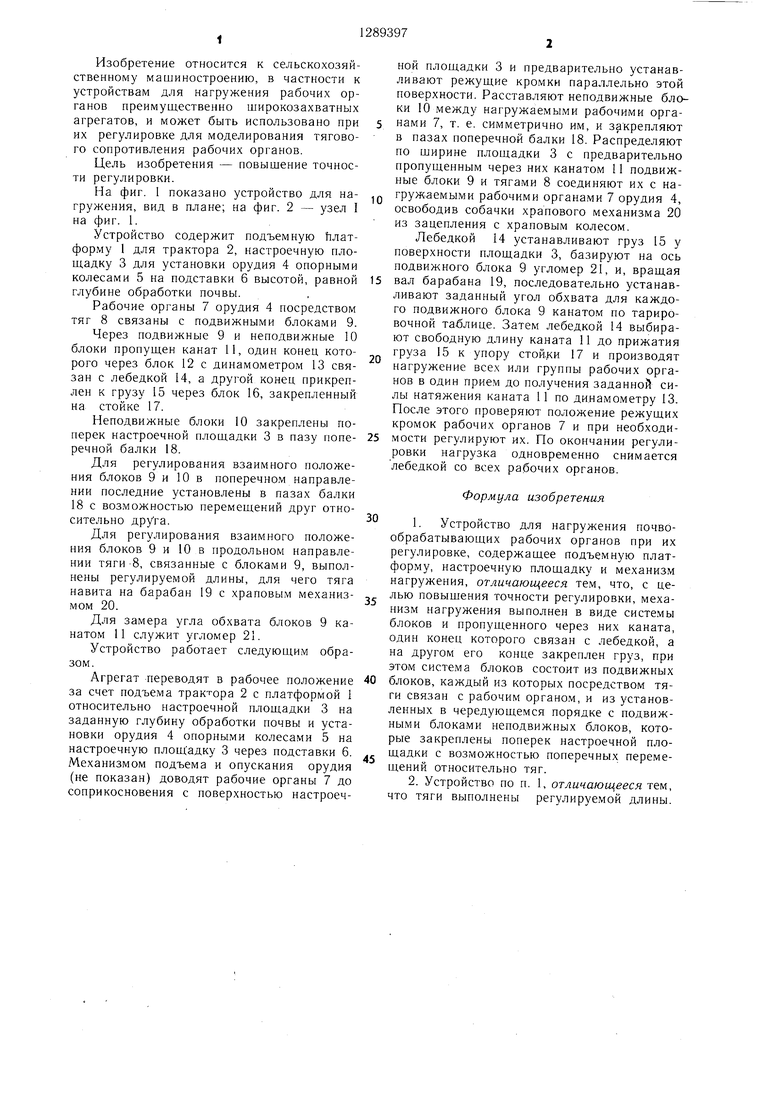
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УСПОКОЕНИЯ РАСКАЧИВАНИЯ ГРУЗОЗАХВАТНОГО ОРГАНА | 2002 |
|
RU2209761C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ РАЗВОРОТЧИК-УСПОКОИТЕЛЬ РАСКАЧИВАНИЯ ГРУЗОЗАХВАТНОГО ОРГАНА | 1993 |
|
RU2048421C1 |
| Кран-манипулятор | 1985 |
|
SU1271817A1 |
| Универсальное транспортное средство для перевозки строительных конструкций и легковесных штучных грузов | 1984 |
|
SU1207851A1 |
| ГРУЗОПОДЪЕМНОЕ УСТРОЙСТВО | 2000 |
|
RU2193517C2 |
| ПРИВОД УГОЛЬНОЙ ПИЛЫ | 2001 |
|
RU2203417C1 |
| Крановая установка | 1986 |
|
SU1361103A1 |
| Шаговый подъемник | 1978 |
|
SU767013A1 |
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВКИ ТЯЖЕЛОВЕСНЫХ ГРУЗОВ ПО ЛЕСТНИЧНЫМ ПРОЛЕТАМ | 2008 |
|
RU2380307C1 |
| КРАН ДЛЯ ОБРАЩЕНИЯ С ОТРАБОТАВШИМ ЯДЕРНЫМ ТОПЛИВОМ В ЗАЩИТНОЙ КАМЕРЕ | 2007 |
|
RU2352516C1 |
Изобретение относится к сельскохозяйственному машиностроению и может быть использовано при регулировке почвообрабатывающих рабочих органов для моделирования их тягового сопротивления. При использовании устройства повышается точность регулировки. Устройство состоит из подвижных 9 и неподвижных 10. блоков, между которыми пропушен канат 11. Один конец каната 11 через динамометр 13 связан с лебедкой 14, а другой конец прикреплен к грузу 15. Каждый подвижный блок 9 посредством тяги 8 регулируемой длины связан с рабочим органом 7 орудия 4. Неподвижные блоки 10 закреплены поперек настроечной площадки 3 в пазу поперечной балки 18с возможностью перемещений вдоль него. Индивидуальную нагрузку на каждый рабочий орган 7 можно создать как изменением длины тяги 8, так и путем изменения расстояния между неподвижными блоками 10 за счет их перемещения в пазу балки 18, а также комбинации этих вариантов. В результате достигается одновременное групповое нагружение рабочих органов 7 с имитацией индивидуальных нагрузок на каждый рабочий орган. 1 з. п. ф-лы, 2 ил. kn 1С сх со оо со 
| Способ регулирования широкозахватных секционных почвообрабатывающих агрегатов | 1984 |
|
SU1166687A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
