1
Изобретение относится к устройствам контроля и может быть использовано в устройствах идентификации элементов и систем автоматического управления, например, следящих систем
Цель изобретения - повышение точности и помехоустойчивости устройства при ступенчатом тестовом сигнале
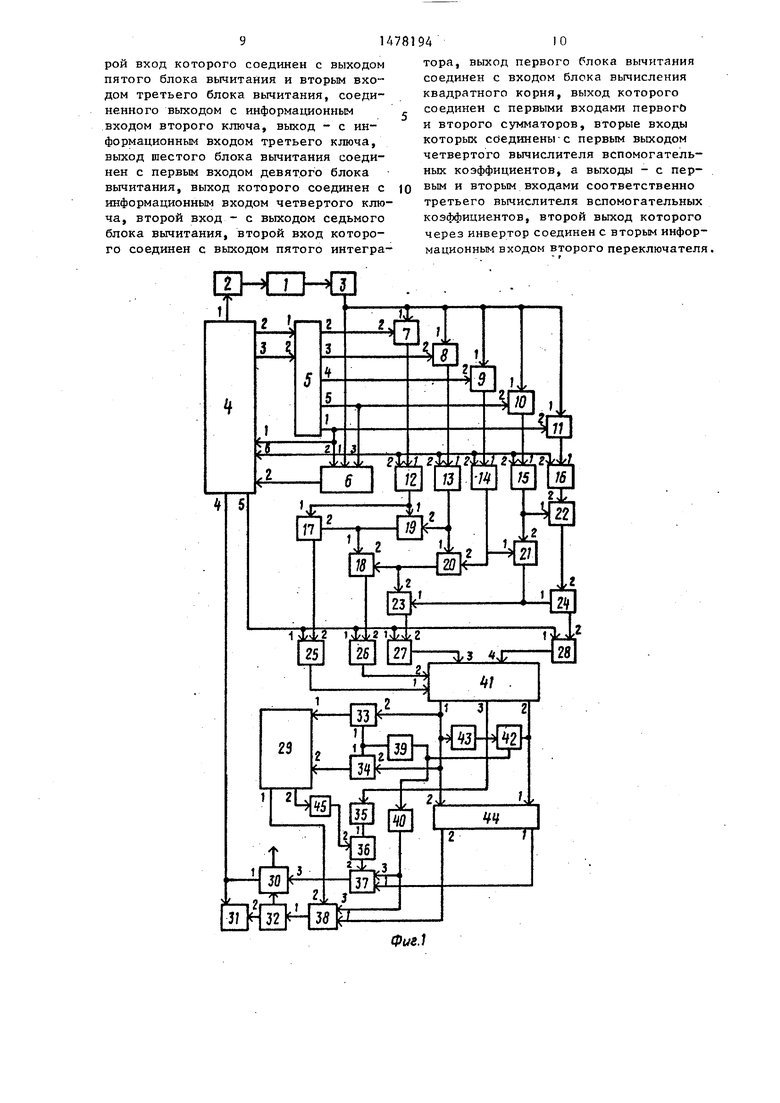
На фиг. 1 приведена структурная схема устройства; на фиг. 2 - схема блока управления; на фиг„ 3 - схема блока задержки; на фиг. 4 - схема блока контроля; на фиг 5 - реализация блока памяти; на фиг 6 - схема четвертого вычислителя вспомогательных коэффициентов; на фиг 7 - схема первого вычислителя вспомогательных коэффициентов; на фиг„ 8 - схема реле времени; на фиг0 9 - схема третьего вычислителя вспомогательных коэффициентов о
Устройство для определения параметров динамического звена содержит (фиг. 1) исследуемый объект 1, масштабный блок 2, нормирующий блок 3, блок 4 управления, блок 5 задержек, блок 6 контроля, с пятого по девятый ключи 7-11, с первого по пятый интеграторы 12-16, со второго по девятый блоки 17-24 вычитания, первый 25, второй 26, третий 27 и четвертый 28 ключи, третий вычислитель 29 вспомогательных коэффициентов, первый блок 30 умножения, первый квадратор 31, второй блок 32 умножения, первый 33 и второй 34 сумматоры, второй вычислитель 35 вспомогатель4
00
СО
NU
ных коэффициентов, второй 36, первый 37 и третий 38 переключатели, блок 39 вычисления квадратного корня, пороговый блок 40, четвертый вычислитель 41 вспомогательных коэффициентов, первый блок 42 вычитания, второй квадратор 43, первый вычислитель вспомогательных коэффициентов 44 и инвертор 45„
Елок 4 управления содержит (фиго 2) блок 46 напряжений, первое реле 47, кнопку Пуск 48, кнопку Сброс 49, второе реле 50, первую схему 51 задержки, третье реле 52, первый 53 и второй 54 масштабные блоки, четвертое 55 и пятое 56 реле, вторую схему 57 задержки и индикаторную лампу 58„
Блок 5 задержек (фиг 3) содержит первую-пятую управляемые схемы 59- 63 задержек, реле 64 времени, инвертор 65 и схему 66 совпаденияо
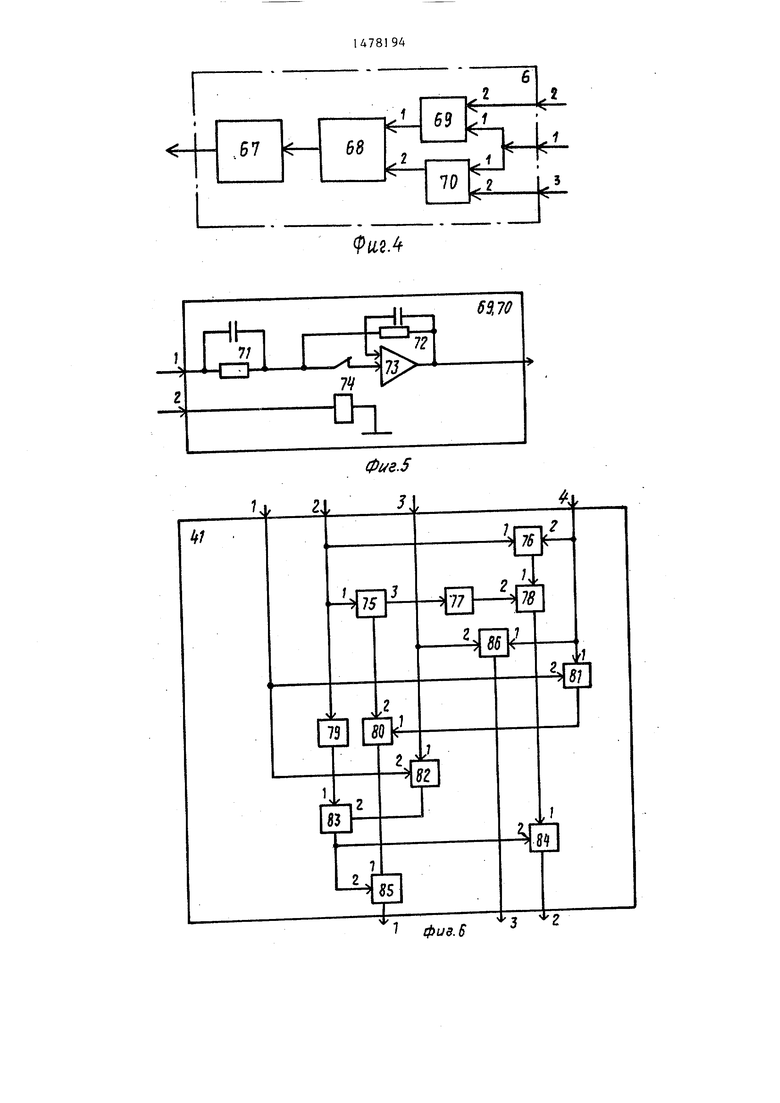
Блок 6 контроля (фиг„ 4) содержит нуль-орган 67, блок 68 вычитания первый 69 и второй 70 блоки памяти.
Блоки 69 и 70 памяти (фиг. 5) содержат первую 71 и вторую 72 RC- цепочки, усилитель 73 и реле 74
Четвертый вычислитель 41 вспомо- гательньгх коэффициентов (фиг. 6) содержит первый 75 и второй 76 блоки умножения, первый 77 квадратор, первый блок 78 вычитания, второй квадратор 79, вт рой блок 80 вычитания, третий 81 , четвертый 82 блоки умножения, трь. ли блок 83 вычитания, первый - третий блоки 84-86 деления
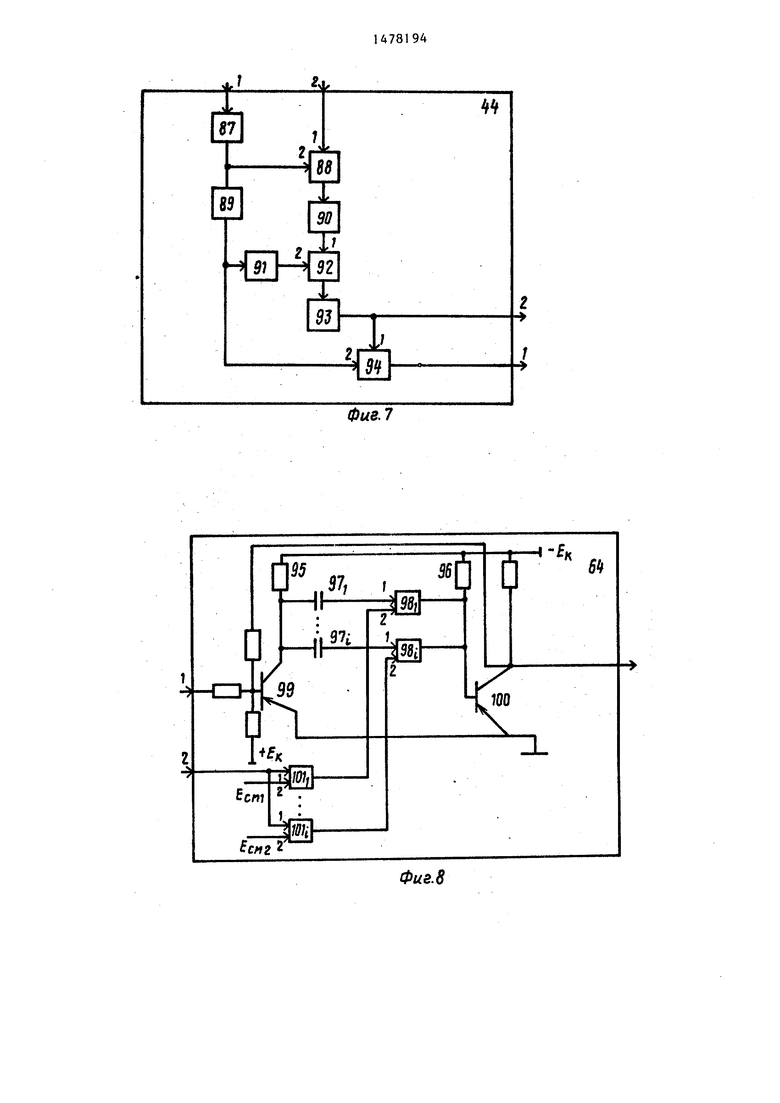
Первый вычислитель 44 вспомогательных коэффициентов (фиг0 7) содержит первый вычислитель 87, первый блок 88 деления, второй 89 и третий 90 вычислители, квадратор 91, сумматор 92, второй блок 93 деления и блок 94 умножения
Реле 64 времени (фиг0 8) содержит первый 95 и второй 96 резисторы, конденсаторы 97, переключатели 98., первый 99 и второй 100 транзисторы и пороговый блок 101 о
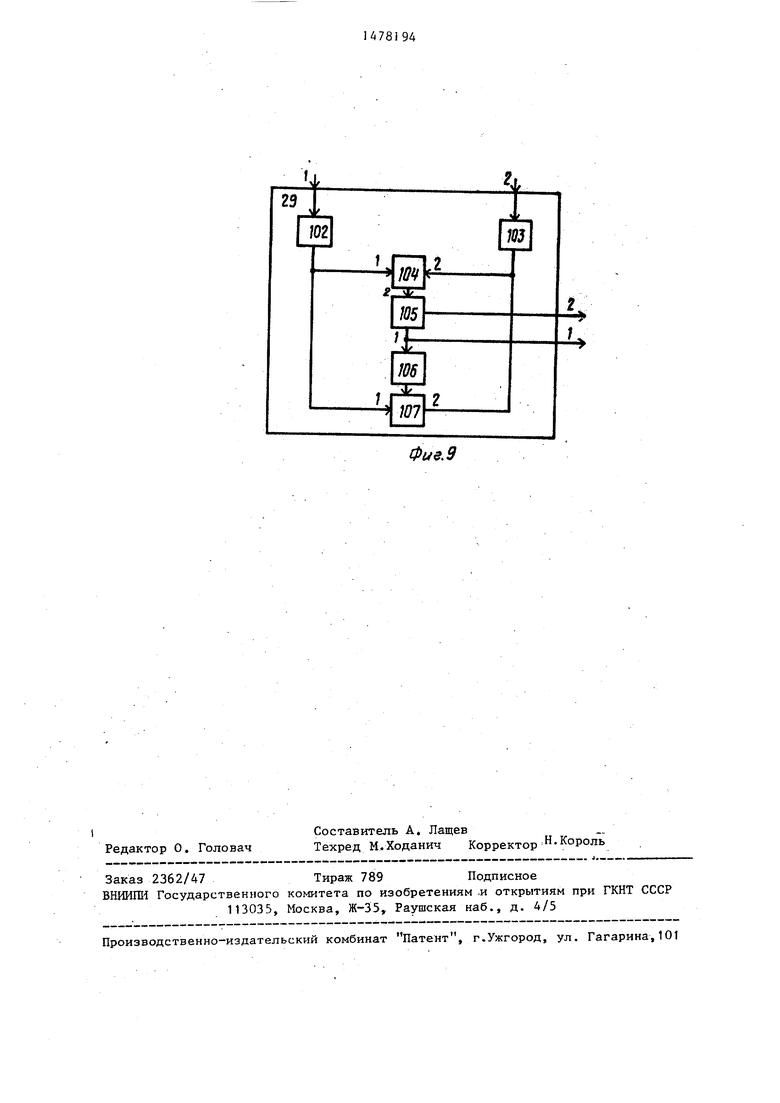
Третий вычислитель 29 вспомогательных коэффициентов (фиг 9) содержит первый 102 и второй 103 вычислители, сумматор 104, первый блок 105 умножения, блок 106 деления и второй блок 107 умножения.
Устройство для определения параметров динамического звена работает следующим образом.
0
5
0
5
0
5
0
5
0
5
Б зависимости от априорной информации, имеющейся о передаточной функции исследуемого объекта 1, второй переключатель 36 устанавливается в соответствующее положение. Если передаточная функция объекта имеет второй порядок, то второй пере- ключ-атель 36 подключает второй выход третьего вычислителя 29 к второму входу первого переключателя 37 Коэффициент передачи масштабного блока 2 устанавливается так, что сигнал на его выходе соответствует линейной зоне исследуемого объекта 1, а коэффициент передачи нормирующего блока таким, что его выходной сигнал имеет уровень, достаточный для точного определения параметров „
Зная априорно примерную длительность переходного процесса исследуемого объекта 1, устанавливается на выходе масштабного блока 53 сигнал, значение которого определяет величину периода интегрирования Т. Этот сигнал поступает на третий выход блока 4 управления и.через второй масштабный блок 54 на четвертый выход блока 4 управления
При нажатии кнопки Пуск 48 в блоке 4 управления срабатывает первое реле 47 и замыкает нормально разомкнутые контакты. При этом блокируется кнопка Пуск 48 и поступает сигнал постоянного уровня на вход исследуемого объекта 1 и на входы пяти управляемых схем 59-63 задержки в блоке 5 задержек. Включение реле 64 времени совместно с логическими элементами инвертором 65 и схемой 66 совпадения обеспечивает появление сигнала на выходах пяти схем 59-63 задержек с некоторыми запаздываниями по отношению к входному сигналу на время Т, 2Т, ЗТ, 4Т, 51.
Сигналы с выходов блока 5 задержек поступают на вторые входы пято- го-девятого ключей 7-11, последовательно закрывая их через промежутки времени Т. При этом осуществляется интегрирование сигнала с выхода исследуемого объекта 1 пятью интеграторами 12-16 на соответствующих интервалах .
Одновременно сигналы с выходов четвертой 62 и пятой 63 управляемых схем задержек поступают на первые входы блоков 69-70 памяти в блоке 6
51
контроля, в которых срабатывает реле 74. При этом на выходе блока 68 вычитания формируется сигнал yg- уц . В случае, когда длительность проме- жутка времени Т выбрана правильно 5 осуществляется обработка восходящего участка переходной характеристики, то сигнал на выходе нуль-органа 67 не появляется и реле 55 в блоке 4 управления не срабатывает. В момент последнего съема информации 5Т поступает сигнал на пятое реле 56 и поступает сигнал на первые входы четырех ключей 25-28, которые ера- батывают, и сигналы с выходов блоков 17, 18, 23 и 24 вычитания поступают на первый-четвертый входы четвертого вычислителя 41. Из значений разностей интегралов на последователь- ных участках переходной характеристики в четвертом вычислителе 41 осуществляется определение вспомогательных коэффициентов К; по формулам
Уэ-УЛ+(У2-У,Жй -(у4-Уз); () (У4-УЛ+( -().
При этом на выходе первого блока
а2
farccos (- -™)Т + () 1Ч К J
(2
42 вычитания формируется сигнал D К - 4К4.
Если D 0, то сигнал на выходе порогового блока 40 равен нулю и первые входы первого 37 и третьего 38 переключателей подключены к их выходам. В результате на выходах первого 30 и второго 32 блоков ум- ножения сигналы равны коэффициента
а Т.
-In лПГа. Т
Гагссоз(- Ц)Т+(1п-
L
-EJ
передаточной функции объекта К
W(S)
(3)
a:S + I
В случае, если сигнал на входе порогового блока 40 Dfe 0, то на его выходе формируется сигнал, который поступает на третьи входы первого 37 и третьего 38 переключателей,, В результате в первом 37 и третьем 38 переключателях подключаются
946
их вторые входы к выходам и тогда на выходах первого 30 и второго 32 блоков умножения сигналы равны 2
™ К7 D775 ln(- 2 + -2)1п( 2
К.
2 ;
,- 1015 - 20 25
30
35
40
45
50
55
(- |1 +
D .. К, -г)-Ип(-r)J
1/ln
а кТ о771,
1п + ---)1п(---)
(4)
Формирование управляющего сигнала D к определение его знака связано с различными формулами вычисления параметров в случаях, когда передаточная функция исследуемого объекта (3) описывается колебательным звеном, т.е. if 1 1 при I) О, и в случае, если 1 при DS О
Если передаточная функция исследуемого объекта представляет собой апериодическое звено, второй переключатель 36 устанавливается в первое положение, т.еа его выход подключен к выходу второго вычислителя 35, сигнал на выходе которого равен AS4 -Ts,
Сигнал на входе порогового блока 40 в этом случае всегда больше нуля, поэтому выход первого переключателя 37 всегда подключен к его второму входуо Сигнал на выходе первого блока 30 умножения равен коэффициенту а{ в (3), значение сигнала на выходе второго блока 32 умножения при этом безразлично.
В случае, когда длительность переходного процесса оказалась меньше, чем предполагалось, и значения у и у4 попали на установившийся участок переходной характеристики, то разница их значений на выходе блока 68 вычитания близка к нулю и сигнал на выходе нуль-органа 67 по.ступает на обмотку четвертого реле 55 в блоке 4 управления, При этом после срабатывания реле 56 поступает сигнал на индикаторную лампу 58, а сигнал на срабатывание четырех ключей 25- 28 не поступает. В этом случае необходимо уменьшить величину сигнала на выходе первого масшттбного блока 53 и повторить эксперимент скова. Для этого необходимо пахать кнопку Сброс 49 в блоке 4 управления. Для предотвращения пуска устройства,
прежде чем установится начальное состояние исследуемого объекта 1, предусмотрена цепь в блоке 4 управления, содержащая второе реле 50, схему 51 задержки и третье реле 52,
После окончания переходного процесса при подаче тестового сигнала можно определить коэффициент К в (3) путем деления значений выходных сиг- налов масштабного блока 2 и нормирующего блока 3 с учетом коэффициента передачи блока 3„
Таким образом, предлагаемое устройство позволяет повысить точность определения параметров динамического звена в реальных условиях (при наличии помех измерения).
Формула изобретения
Устройство для определения параметров динамического звена, содержащее блок управления, первьй выход которого подключен через масштаб- ный блок к входу исследуемого объекта, первьй вход соединен с первым выходом блока задержек, второй и третий выходы - соответственно с первым и вторым входами блока задержек, четвертый выход - с первым входом первого блока умножения, второй вход которого соединен с выходом первого переключателя, первый вход которого соединен с первым выходом пер- вого вычгс дателя вспомогательных коэффициентов, второй вход через второй переключатель соединен с выходом второго вычислителя вспомогательных коэффициентов, третий вход через пороговый блок соединен с выходом первого блока вычитания, первый вход которого соединен с первым входом первого вычислителя вспомогательных коэффициентов, второ выход которого соединен с первым информационным входом третьего переключателя, второй информационный вход которого соединен с первым входом третьего вычислителя вспомога- тельных коэффициентов, управляющий вход - с управляющим входом первого переключателя, выход - с первым входом второго блока умножения, второй вход которого через первый квадратор соединен с четвертым выходом блока управления, пятый выход которого соединен с управляющими входами с первого по четвертый ключей, выходы которых соединены соответственно с одноименными входами четвертого вычислителя вспомогательных коэффициентов, первый выход которого соединен с вторым входом первого вычислителя вспомогательных коэффициентов и через второй квадратор с первым входом первого блока вычитания, второй выход - с вторым входом первого блока вычитания, третий вход - с входом второго вычислителя вспомогательных коэффициентов, вход нормирующего блока подключен к выходу исследуемого объекта, отличающееся тем, что, с целью повышения точности и помехоустойчивости устройства при ступенчатом тестовом сигнале, в него введены блок вычисления квадратного корня, инвертор, ,два сумматора, блок контроля, пять интеграторов, восемь блоков вычитания, с пятого по девятый ключи, соединенные выходами с информационными входами соответственно с первого по пятый интеграторов, информационные входы ключей соединены с выходом нормирующего блока и первым входом блока контроля, второй вход которого соединен с управляющим входом девятого ключа и первым выходом блока задержек, второй, третий и четвертый выходы которого соединены с управляющими входами пятого, шестого и седьмого ключей соответственно, а пятый выход - с управляющим в,хо- дом восьмого ключа и третьим входом блока контроля, выход которого соединен с вторым входом блока управления, шестой выход которого соединен с управляющими входами всех интеграторов, выход первого интегратора соединен с первым входом второго блока вычитания, выход которого соединен с входом первого ключа, второй вход - с первым входом третьего блока вычитания и выходом четвертого блока вычитания, первый вход которого соединен с выходом первого интегратора, второй вход - с выходом второго интегратора и первым входом пятого блока вычитания, второй вход которого соединен с выходом третьего интегратора и первым входом шестого блока вычитания, второй вход которого соединен с выходом четвертого интегратора и первым входом седьмого блока вычитания, выход - с первым входом восьмого блока вычитания, вто
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения параметров динамического звена | 1983 |
|
SU1160372A1 |
| Анализатор частотных характеристик | 1985 |
|
SU1307373A1 |
| Устройство для определения параметров передаточной функции линейного динамического объекта | 1988 |
|
SU1585782A1 |
| Устройство для измерения чистого запаздывания инерционного звена | 1984 |
|
SU1236430A1 |
| Способ определения параметров передаточной функции линейного динамического звена и устройство для его осуществления | 1986 |
|
SU1377826A1 |
| Устройство для определения коэффициента усиления динамического объекта | 1984 |
|
SU1211700A1 |
| Устройство для определения коэффициента усиления объекта | 1985 |
|
SU1291932A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК МАТЕРИАЛОВ | 2013 |
|
RU2544312C1 |
| Устройство для определения параметров объекта | 1987 |
|
SU1446602A1 |
| Устройство для определения параметров динамического звена второго порядка | 1984 |
|
SU1231489A1 |

Изобретение относится к устройствам контроля. Цель - повышение точности и помехоустойчивости определения параметров динамического звена при ступенчатом воздействии. Устройство содержит блок управления, масштабный блок, включенный на входе исследуемого объекта, нормирующий блок, вход которого подключен к выходу исследуемого объекта, а выход через ключи-к интеграторам, выходы которых через вычитатели подключены к вычислителям. При этом для определения параметров передаточной функции объектов первого и второго порядков используются значения интегралов переходной характеристики на четырех последовательных равных интервалах времени и дальнейшее вычисление по точным формулам, что позволяет обеспечить достижение поставленной цели. 9 ил.
Ъ ЪЩ
eisi1 ;
Фиг. 7
Фиг.8
i
т
Q
Фие.9
| Васильев Д.В | |||
| и др, Проектирование и расчет следящих систем | |||
| - Л.: Судостроение, 1964, с„ 509, Авторское свидетельство СССР № 1160372, кл„ G 05 В 23/02, 1983 |
