Известны способы решения тршонометрических уравиенш
в cos- Д с индикацией решения на экране электронно-лучевой трубки.
Однако при применении этих способов необходима сложная аппаратура, содержащая вращающиеся трансформаторы или блоки расщепле1П1Я. Результат решения получают иа экране электронно-лучевой трубки для одного вполне определенного значения аргумента.
В описываемом способе указанные недостатки устранены тем, что гармоническое иапряжение сравнивают с постоянным напряжением и полученный в результате сравнения имиульс подают на управляющий электрод электронно-лучевой трубки.
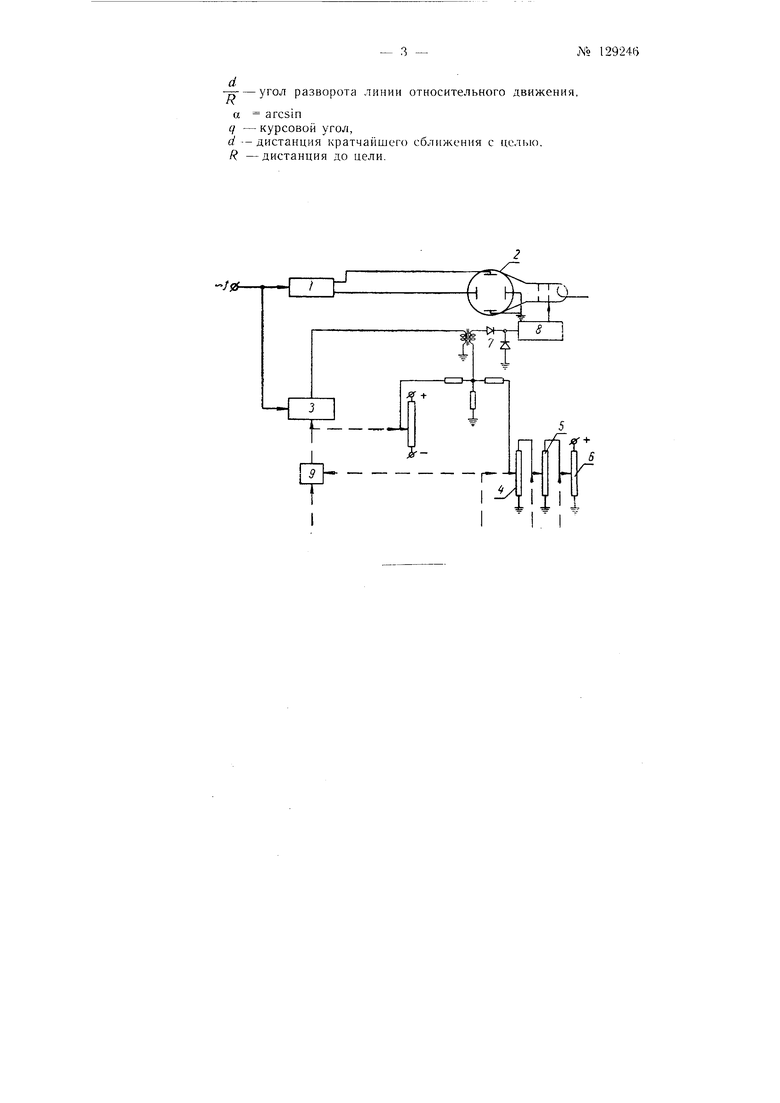
На чертеже изображена электрическая схема, иоясняюп ая описываемый способ.
Напряжение с произвольной частотой / подают на вход генератора кольцевой развертки /, выход которого подключен к горизонтальным и вертикальным пластипам электронно-лучевой трубки 2. Кроме того, напряжение с частотой /, снимаемое с выхода фазовращателя 3, и постоянное напряжение, снимаемое с системы потенциометров 4, 5 и 6 и ироиорциональное К, сравнивают при помощи амплитудного 1сомпаратора или какого-либо другого блока сравнения 7. Полученный в результате сравнения импульс с утлом отсечки 0 усиливают, формируют блоком формирования 8 и подают на управляющий электрод электронно-лучевой трубки 2. На экране трубки наблюдают подсвеченный сектор, ограничейный значениями аргумента - - : --.
ни
№ 129246
Этот способ может быть исиользаван для решения навигационных задач по раехождейию судов в море, описываемых уравнениями
cos- ---. sina -sin (/-2) и F.,:(/-: 3 90,
.
где - собственная скорость судна, решающего задачу, г„-относительная скорость судов,
d а-- агС51П-д--угол разворота линии относительного движения,
q- курсовой угол,
d - дистанция кратчайшего сближения с целью, R - дистанция до цели,
1J; -угол, определяюи1ий положение сектора безопасных курсов.
При решении навигационных задач данные х и -v,, вводят, перемешая движки потенциометров 5 и 6, а для ввода значений а используют механический дифференциал 9, посредством которого поворачивают фазовраш,атель 3 и потенциометр 4 на угол q + a. Светяш,ийся сектор на экране электронно-лучевой трубки наглядно показывает сектор углов отворота, при которых опасность столкновения судов будет предотвращена.
Описанный способ может быть применен и для решения других задач маневрирования, связанных с изменением векторного треугольника скоростей. В этом случае вместо угла q следует вводить угол ф, образованный пересечением линии относительного движения цели и лииии собственного курса.
Ручной ввод данных может быть заменен автоматическим с автоматическим поворотом судна и выводом его в безопасный сектор. Для выбора оптимального маневра при угрозе столкновения с несколькими судами одновременно результаты решений для каждого из угрожающих столкновением судов подают на общий индикатор, на экране которого высвечивается сектор курсов, обеспечивающих безопасное расхождение со всеми судами, угрожающими столкновением.
П ) е д м е т и з обретения
1.Способ решения тригонометрических уравнений вида (
с индикацией решении на электронно-лучевой трубке, о т л и ч а ю щ, и йся тем, что, с целью определения сектора, ограниченного значениями
ев.,
аргумента от -т ДО , на экране элекронно-лучевои трубки, гармоническое напряжение (ток) произвольной частоты сравнивают, нанример на компараторе, с постоянным напряжением (током), величина которого пропорциональна К а образующийся в результате сравнения напряжений (токов; импульс с углом отсечки в подают на управляюндий электрод электронно-лучевой трубки, развертка луча которой осуществляется е частотой сравниваемого гармонического напряжения.
2.Применение способа по п. 1 для решения навигационны.х задач по расхождению судов в море, описываемых уравнением;
о . cos- -sin а-sin ((7 а).
где «-собственная скорость судна, решающего задачу, Vg-относительная скорость судов,
-prугол разворота линии относительного движения,
а а resin с/ - куреовой угол,
d -- дистанция кратчайшего сближения с целью. R -дистанция до цели.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРЕДСТАВЛЕНИЯ СУДОВОДИТЕЛЮ ОБОБЩЕННОЙ ИНФОРМАЦИИ ДЛЯ КОНТРОЛЯ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1992 |
|
RU2077450C1 |
| Способ информационного обеспечения судоводителя о надводной обстановке | 2023 |
|
RU2833310C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ ОБ ОПАСНОСТИ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ВОЗДУШНЫМ ОБЪЕКТОМ | 2023 |
|
RU2812188C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ВЫСОКОСКОРОСТНЫХ СУДОВ | 2004 |
|
RU2260191C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДНА | 2012 |
|
RU2501708C1 |
| СИСТЕМА ПРЕДОТВРАЩЕНИЯ ОПАСНОГО СБЛИЖЕНИЯ СУДОВ, ИСПОЛЬЗУЮЩАЯ ОБЩЕЕ МОРСКОЕ ИНФОРМАЦИОННОЕ ПРОСТРАНСТВО | 2013 |
|
RU2548646C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| Способ генерации предварительной прокладки пути судна и устройство для его реализации | 2021 |
|
RU2782617C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ БЕЗАВАРИЙНОГО ДВИЖЕНИЯ НАДВОДНОГО ИЛИ ПОДВОДНОГО СУДНА ПРИ НАЛИЧИИ ПОДВОДНЫХ ИЛИ НАДВОДНЫХ ПОТЕНЦИАЛЬНО ОПАСНЫХ ОБЪЕКТОВ | 2012 |
|
RU2513198C2 |
| УСТРОЙСТВО ИНДИКАЦИИ ОПАСНОСТИ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1997 |
|
RU2131622C1 |