Изобретение относится к области информационно-коммуникационных технологий, а именно к оборудованию, обеспечивающему безопасность мореплавания на основе интенсивно развивающегося общего морского информационного пространства.
Проблема расхождения судов в море остается весьма актуальной. Анализ причин последних происшествий показывает, что в большинстве случаев человеческий фактор лежит в основе череды действий, ведущих к развитию неблагоприятной ситуации сближений судов. В настоящее время для судоводителя становится все труднее принять оптимальное решение для предотвращения опасной ситуации в условиях возрастания интенсивного движения судов. Необходима надежная система, повышающая безопасность расхождения судов путем заблаговременного оптимального маневрирования и уменьшения роли человеческого фактора в принятии решений.
В помощь судоводителю для принятия правильного маневра в настоящее время применяются некоторые технические средства и организационные мероприятия.
В частности, на всех судах установлены Средства Автоматической Радиолокационной Прокладки (САРП). Резолюция IMO (Международная Морская Организация) А.823 (19), принятая 23 ноября 1995 года (Сборник №4 резолюций ИМО. - СПб.: ЗАО ЦНИИМФ, 1996. - 384 с), установила новые требования к современным САРП, устанавливаемым на морских судах, построенных после 01 января 1997 года. В этих требованиях заложены условия, по которым с помощью САРП можно только предварительно имитировать предполагаемый свой маневр в предположении, что все остальные участники движения не изменяют курса и скорости. То есть при изменении курса и скорости встречного судна (цели) САРП в их современном виде не могут помочь судоводителю в принятии решения о маневрировании, и решение принимается на основании собственного опыта, Международных Правилах Предупреждения Столкновений Судов (МППСС) и субъективной оценки ситуации.
Береговые Системы Управления Движения Судов (СУДС) предполагают частное решение задачи в условиях ограниченной акватории и на подходах к портам. Они осуществляют общий контроль за движением судов в своих границах. С 01 августа 2002 г. введено в действие «Положение о системах управления движением судов», разработанное в Государственной Службе Морского Флота при Министерстве Транспорта Российской Федерации. Оно основано на резолюции IMO А.857 (20) «Руководство по службам движения судов» (Сборник №8 резолюций ИМО. - СПб.: ЗАО ЦНИИМФ, 1998, 2001. - 416 с). Согласно всем перечисленным документам, роль СУДС сводится к координации движения судов путем выдачи рекомендаций отдельным судам, с которыми поддерживается связь на ультракоротких волнах (УКВ). При этом рекомендации выдаются оператором СУДС на основании собственной субъективной оценки ситуации. Но в случае возникновения опасной ситуации окончательное решение и ответственность остаются за судоводителем, и все опять сводится к человеческому фактору.
Человеческий фактор все еще остается слабым звеном в предотвращении столкновений:
«Наиболее опытные судоводители полагают, что они понимают МППСС довольно хорошо, но это не всегда факт. Даже если это так, то насколько хорошо обучены все члены команды на мостике? Частично проблема в том, что множество судоводителей просто не понимают МППСС» (How Well Do You Know the Collision Regulations? (2004) Standard Safety No 15, June, The Standard P&I Clubs are managed by Charles Taylor Consulting plc companies, 5-6).
Однако и сами МППСС в некоторых случаях не могут предоставить однозначного решения:
«МППСС, даже если судоводители понимают их в точности, не дают всех ответов. Существует много трудных ситуаций, которые они не могут разрешить… Имеются аналогичные затруднения в отношении ситуации обгона, и особенно если вовлечены более чем два судна или капитан судна с меньшей скоростью выбирает маневр изменением курса» (How Well Do You Know the Collision Regulations? (2004) Standard Safety No 15, June, The Standard P&I Clubs are managed by Charles Taylor Consulting plc companies, 5-6).
МППСС являются руководством к действию для судоводителей. Но вместе с тем следует признать, что рекомендации в них прописаны для ситуации сближения только двух судов. Известны примеры, когда при наличии трех судов принятие судоводителями стандартных решений в соответствии с МППСС в предположении, что другие суда не меняют курса и скорости, может привести к развитию ситуации неблагоприятного сближения.
Наиболее близким и перспективным техническим средством для повышения безопасности мореплавания, использующим общее морское информационное пространство, принятым за прототип, является система предотвращения опасного сближения судов, реализованная в виде Автоматической Идентификационной Системы (АИС) («Судовое оборудование универсальной автоматической информационной (идентификационной) системы (АИС) (Класс «А»). Временные технико-эксплуатационные требования. МФ-02-22/848-62.» Государственная служба морского флота Министерства транспорта РФ. (Введены в действие с 15 марта 2002 года). - Москва, 2002. - 117 с.), содержащая судовой комплекс Автоматической Идентификационной Системы (АИС), включающий основной блок Автоматической Идентификационной Системы (АИС), пульт управления и отображения (ПУО), судовую антенну ультракоротковолновой связи и источник питания, при этом основной блок Автоматической Идентификационной Системы выполнен с размещением в нем портов приема сигналов от внешних информационно-коммуникационных устройств в виде антенны GPS (Глобальная система позиционирования, США) / GLONASS (Глобальная навигационная спутниковая система, Россия), внешнего приемника GPS/GLONASS, гирокомпаса, датчика скорости поворота судна, датчика дифференциальных поправок, электронной картографической навигационно-информационной системы (ЭКНИС), устройства лоцманский порт и канала дальней связи, а сам данный блок подключен к пульту управления и отображения (ПУО), к выходу судовой антенны ультракоротковолновой связи (УКВ) и источнику питания.
Известная система работает следующим образом. В основной блок АИС судна на его порты поступают данные в виде сигналов от внешних устройств:
- порт антенны GPS (Глобальная система позиционирования, США) / GLONASS (Глобальная навигационная спутниковая система, Россия) осуществляет временную синхронизацию для всех станций от единого источника универсального всемирного координированного времени (UTC);
- порт внешнего приемника GPS/GLONASS подает сигналы о текущем положении и перемещении своего судна;
- порт гирокомпаса подает сигналы о текущем курсе своего судна;
- порт датчика скорости поворота судна подает сигналы о текущей угловой скорости изменения курса своего судна;
- порт датчика дифференциальных поправок осуществляет прием дифференциальных поправок глобальной навигационной спутниковой системы (ГНСС) по каналу АИС и выдачу их приемнику ГНСС внешнему и встроенному (функция мобильной станции);
- порт электронной картографической навигационно-информационной системы (ЭКНИС) осуществляет прием и выдачу статических, рейсовых данных, текстовых и двоичных сообщений на электронные карты;
- устройство лоцманский порт служит для подключения лоцманской аппаратуры, которая выполняется в виде портативного компьютера (ноутбука) с электронной картой района лоцманского обслуживания;
- порт канала дальней связи применяется для существенного расширения зоны действия базовой станции АИС, когда судовые данные передаются по каналам международной морской спутниковой системы (ИНМАРСАТ-С),
а сам данный блок подключен к пульту управления и отображения (ПУО), судовой антенне ультракоротковолновой связи (УКВ) и источнику питания. Эти сообщения формируют информационный пакет информации для текущего момента времени. Этот пакет периодически и регулярно передается через антенну в диапазоне УКВ морской подвижной судовой радиослужбы. Одновременно через данную антенну каждым судном аналогичным путем принимается аналогичная информация от других судов, находящихся в радиусе действия, ограниченном распространением радиоволн УКВ диапазона (20-30 морских миль), его основным блоком. Принятая информация автоматически обрабатывается и отображается на навигационном дисплее ПУО (пульт управления и отображения), к которому подключен основной блок АИС. Необходимая синхронизация работы всех АИС, как судовых, так и береговых обеспечивается сигналами внешних устройств глобальной навигационной спутниковой системы (ГНСС, в частности GLONASS) через основной блок АИС. По сигналам ГНСС в судовых навигационных приемниках рассчитываются текущие координаты каждого судна и вектор скорости.
С утверждением на 73-й сессии комитета ИМО по безопасности на море Резолюции MSC 99(73) от 05 декабря 2000 года «Принятие поправок к правилу 19 главы 5 Международной конвенции по охране человеческой жизни на море» («Международная конвенция по охране человеческой жизни на море 1974 года (СОЛАС-74)». (Консолидированный текст, измененный Протоколом 1988 года к ней, с поправками). - СПб.: ЗАО ЦНИИМФ, 2008. - 984 с.), которые включают новую редакцию главы V ″Безопасность мореплавания″, кардинально изменились требования к оснащению морских судов навигационным оборудованием и, в частности, аппаратурой АИС. В соответствии с этими поправками все суда валовой вместимостью 300 и выше были уже оборудованы АИС не позднее 31 декабря 2004 года (вместо 01 июля 2007 года). В настоящее время оснащение большинства судов АИС в глобальном масштабе уже практически закончилось.
Недостатки известного технического средства, использующего общее морское информационное пространство, принятого за прототип, заключаются в следующем: в приложении 3 Резолюции IMO MSC.74 (69) (принята 12 мая 1998 года) (МК СОЛАС-74) изложены «Рекомендации по эксплуатационным требованиям к универсальной судовой системе автоматического опознавания (AIS)». В соответствии с этими требованиями АИС в ее современном виде все еще не является средством обеспечения безопасности мореплавания в чистом виде, а является вспомогательным информационным средством для всех прочих устройств, предназначенных для безопасного расхождения судов. В этом заключается ее существенный недостаток. Но дальнейшее развитие АИС должно привести к обратному изменению ситуации, что является назревшей актуальной общественной потребностью.
Технической задачей, на которую направлено заявляемое изобретение, является устранение указанных недостатков, а именно: создание системы предотвращения опасного сближения судов, использующей общее морское информационное пространство, которая обеспечит автоматический обмен данными между всеми заинтересованными судами, так чтобы информация была общедоступной и одинаковой. В этих условиях одинаковое судовое оборудование и программное обеспечение, установленное на всех судах, должно оперативно выдать одно и то же оптимальное решение по маневрированию, и ситуация опасного сближения в таком случае будет предотвращена задолго до ее возможного развития.
Поставленная техническая задача достигается тем, что в известной системе предотвращения опасного сближения судов, использующей общее морское информационное пространство, содержащей судовой комплекс Автоматической Идентификационной Системы, включающий основной блок Автоматической Идентификационной Системы, пульт управления и отображения (ПУО), судовую антенну ультракоротковолновой связи (УКВ) и источник питания, при этом основной блок Автоматической Идентификационной Системы выполнен с размещением в нем портов приема сигналов от внешних информационно-коммуникационных устройств в виде антенны GPS (Глобальная система позиционирования, США) / GLONASS (Глобальная навигационная спутниковая система, Россия), внешнего приемника GPS/GLONASS, гирокомпаса, датчика скорости поворота судна, датчика дифференциальных поправок, электронной картографической навигационно-информационной системы (ЭКНИС), устройства лоцманский порт и канала дальней связи, а сам данный блок подключен к пульту управления и отображения (ПУО), к выходу судовой антенны ультракоротковолновой связи (УКВ) и источнику питания, В ОТЛИЧИЕ ОТ НЕЕ заявляемая система дополнительно содержит бортовой компьютер и дополнительный блок Автоматической Идентификационной Системы, выполненный с размещением в нем портов приема сигналов от внешних информационно-коммуникационных устройств в виде радиолокационной станции (РЛС) и средств автоматической радиолокационной прокладки (САРП), а также и сигналов от основного блока Автоматической Идентификационной Системы, причем данный дополнительный блок подключен к бортовому компьютеру, пульту управления и отображения (ПУО) и судовой антенне ультракоротковолновой связи (УКВ).
Совокупность ограничительных и отличительных признаков заявляемого изобретения, выражающаяся в установке основного и дополнительного блоков Автоматической Идентификационной Системы и бортового компьютера, являющегося серийным, в совокупности с их связями, обеспечивает достижение поставленной технической задачи следующим путем. Полученная в основном блоке АИС через его порты связи и информационно-коммуникационные устройства информация ото всех судов, включая свое судно, поступает от него в дополнительный блок АИС, в котором эта информация сравнивается и дополняется данными в виде сигналов, полученных дополнительным блоком от внешних устройств, а именно:
- порт радиолокационной станции (РЛС) подает в него сигналы об относительном положении других судов и положении объектов, не имеющих обеспечения АИС;
- порт средств автоматической радиолокационной прокладки (САРП) подает в него сигналы об относительном перемещении других судов и перемещении объектов, не имеющих обеспечения АИС.
Если при сравнении в дополнительном блоке АИС информация подтверждается, то через антенну УКВ от дополнительного блока АИС на все суда, данные от которых обработаны, передается сигнал подтверждения и упреждающий момент времени, когда свое судно готово выполнить маневр, если это потребуется. Если данные о координатах, курсе и скорости с каким-либо судном расходятся, то с ним подобным же образом в автоматическом режиме через антенну УКВ снова осуществляется обмен этими данными с целью уточнения в дополнительном блоке АИС информации, и, наконец, после их согласования оба эти судна снова подают на все суда сигнал подтверждения и упреждающий момент времени, когда они будут готовы выполнить маневр при необходимости. Когда ими (этими судами) будут получены все эти необходимые подтверждения о получении от остальных судов, то этот скорректированный согласованный пакет информации по всем судам из дополнительного блока АИС поступает на бортовой компьютер, который по заданной программе осуществляет выбор и мониторинг оптимального решения по маневрированию для всех судов на момент времени, наибольший из подтвержденных всеми судами.
Предлагаемое изобретение поясняется следующим графическим материалом.
На фиг.1 представлена блок-схема, позволяющая реализовать заявляемую систему предотвращения опасного сближения судов.
На фиг.2 представлена блок-схема формирования обобщенного пакета данных во временной развертке в заявляемой системе предотвращения опасного сближения судов.
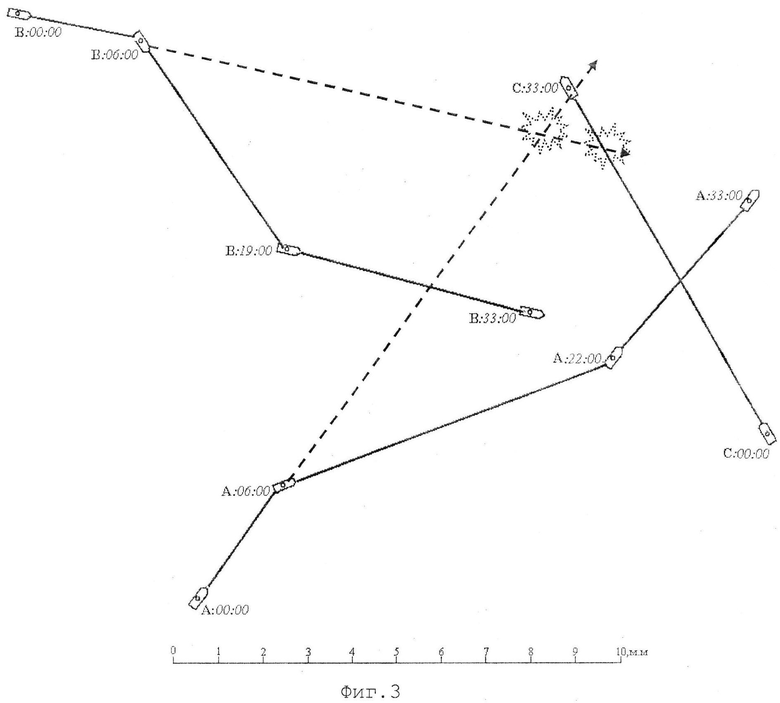
На фиг.3 представлена навигационная прокладка расхождения трех судов, для которых рекомендации по согласованному маневрированию получены в заявляемой системе предотвращения опасного сближения.
Заявляемая система предотвращения опасного сближения судов, использующая общее морское информационное пространство, содержит в своем составе (фиг.1) судовой комплекс Автоматической Идентификационной Системы (АИС) 1, включающий основной блок Автоматической Идентификационной Системы (АИС) 1.1, пульт управления и отображения (ПУО) 1.2, источник питания 1.3, судовую антенну ультракоротковолновой связи (УКВ) 1.4. При этом основной блок Автоматической Идентификационной Системы 1.1 выполнен с размещением в нем портов приема (не показаны) сигналов от внешних информационно-коммуникационных устройств в виде антенны GPS (Глобальная система позиционирования, США) / GLONASS (Глобальная навигационная спутниковая система, Россия) 1.1.1, внешнего приемника GPS/GLONASS 1.1.2, своего гирокомпаса 1.1.3, датчика скорости поворота своего судна 1.1.4, датчика дифференциальных поправок 1.1.5, электронной картографической навигационно-информационной системы (ЭКНИС) 1.1.6, устройства лоцманский порт 1.1.7 и канала дальней связи 1.1.8. Сам данный блок 1.1 подключен к пульту управления и отображения (ПУО) 1.2, к источнику питания 1.3 и к выходу судовой антенны ультракоротковолновой связи (УКВ) 1.4. Также система дополнительно содержит дополнительный блок Автоматической Идентификационной Системы 2, выполненный с размещением в нем портов приема (не показаны) сигналов от внешних информационно-коммуникационных устройств в виде радиолокационной станции (РЛС) 2.1 и средств автоматической радиолокационной прокладки (САРП) 2.2, а также и сигналов от основного блока Автоматической Идентификационной Системы 1.1, и бортовой компьютер 3. Причем данный дополнительный блок 2 подключен к бортовому компьютеру 3, к судовой антенне ультракоротковолновой связи (УКВ) 1.4 и к пульту управления и отображения (ПУО) 1.2 (не показано).
Заявляемую систему на примере движения трех судов A, B, C (фиг.2) используют следующим образом. В основной блок АИС 1.1 поступают данные от внешних устройств 1.1.1-1.1.5, а также 1.2, которые формируют стандартные сообщения, содержащие информацию соответственно о своем судне, его координатах, курсе, опасном грузе на борту, порте назначения, времени прибытия, предполагаемых маневрах и прочие данные. При этом порт антенны GPS (Глобальная система позиционирования, США) / GLONASS (Глобальная навигационная спутниковая система, Россия) 1.1.1 осуществляет временную синхронизацию для всех станций от единого источника универсального всемирного координированного времени (UTC); порт внешнего приемника GPS/GLONASS 1.1.2 подает сигналы о текущем положении и перемещении своего судна; порт гирокомпаса 1.1.3 подает сигналы о текущем курсе своего судна; порт датчика скорости поворота судна 1.1.4 подает сигналы о текущей угловой скорости изменения курса своего судна; порт датчика дифференциальных поправок 1.1.5 осуществляет прием дифференциальных поправок ГНСС по каналу АИС и выдачу их приемнику ГНСС внешнему и встроенному (не показаны) (функция мобильной станции); порт электронной картографической навигационно-информационной системы (ЭКНИС) 1.1.6 осуществляет прием и выдачу статических, рейсовых данных, текстовых и двоичных сообщений на электронные карты; устройство лоцманский порт 1.1.7 служит для подключения лоцманской аппаратуры (не показано), которая выполняется в виде портативного компьютера (ноутбука) с электронной картой района лоцманского обслуживания; порт канала дальней связи 1.1.8 применяется для существенного расширения зоны действия базовой станции АИС, когда судовые данные передаются по каналам международной морской спутниковой системы (ИНМАРСАТ-С). Эти сообщения периодически и регулярно передаются на другие АИС через антенну 1.4 судового комплекса АИС 1 в диапазоне УКВ морской подвижной судовой радиослужбы. Одновременно через антенну 1.4 судового комплекса АИС 1 каждым из судов A, B, C аналогичным путем принимается аналогичная информация от других судов, находящихся в радиусе действия, ограниченном распространением радиоволн УКВ диапазона (20-30 морских миль). Принятая блоком АИС 1.1 данная информация автоматически обрабатывается и отображается на его навигационном дисплее пульта управления и отображения (ПУО) 1.2. Необходимая синхронизация работы всех АИС как судовых, так и береговых (не показаны) обеспечивается глобальной навигационной спутниковой системой (ГНСС, в частности GLONASS) 1.1.1. По сигналам ГНСС в судовых навигационных приемниках (не показаны) рассчитываются текущие координаты каждого судна и вектор скорости. Полученная в основном блоке АИС 1.1 информация ото всех из судов A, B, C, включая свое судно, поступает от него в дополнительный блок АИС 2, в котором эта информация сравнивается с аналогичными данными, полученными от РЛС 2.1 и САРП 2.2 своего судна. Если при сравнении в нем информация подтверждается, то через антенну 1.4 судового комплекса АИС 1 на все суда в данной зоне, данные от которых обработаны, передается сигнал подтверждения и упреждающий момент времени, когда свое судно готово выполнить маневр, если это потребуется. Если данные о координатах, курсе и скорости с каким-либо судном в дополнительном блоке АИС 2 расходятся, то с ним подобным же образом через антенну 1.4 судового комплекса АИС 1 в автоматическом режиме снова осуществляется обмен этими же данными с целью последующего уточнения в блоке АИС 2 информации, и, наконец, после их согласования в нем оба эти судна подают на все остальные суда сигнал подтверждения и упреждающий момент времени, когда они будут готовы выполнить маневр при необходимости. Когда ими (этими судами) будут получены все необходимые подтверждения от остальных судов, то этот скорректированный согласованный пакет информации по всем судам от дополнительного блока АИС 2 поступает на бортовой компьютер 3, который по заданной программе осуществляет выбор и мониторинг оптимального решения по маневрированию для всех судов на момент времени, наибольший из подтвержденных всеми судами.
Основная информационно-коммуникационная задача заявляемого изобретения - сформировать обобщенный пакет исходных данных, одинаковый для всех судов. При его наличии общее морское информационное пространство сработает как СУДС, и человеческий фактор будет сведен к минимуму. Схема, формирующая обобщенный пакет исходных данных во временной развертке при помощи АИС, заключается в следующем (фиг.2):
(1) Основной блок АИС 1.1 каждого судна A, B и C через определенные интервалы времени через антенну 1.4 посылает короткие радиоимпульсы 1a, содержащие пакет полученной от внешних источников 1.1.1-1.1.5, 1.2 информации о позиции, курсе и скорости, судовых маневренных характеристиках, выполняемых и предполагаемых маневрах и прочей необходимой навигационной информации, влияющей на возможность маневрирования;
(2) Основной блок АИС 1.1 каждого из данных судов постоянно сканирует передаваемые установленные радиочастоты 1a, собирает информацию от всех других судов, посылающих радиоимпульсы в соответствии с вышеизложенным пунктом, формирует обобщенный пакет информации 1b, включая свою собственную, и передает ее в дополнительный блок АИС 2;
(3) Обобщенный по данному пункту пакет информации 1b в дополнительном блоке АИС 2 перепроверяется на основании собственных наблюдений за положением и перемещением других судов (например, при помощи САРП и (или) других средств наблюдения), соответствующим образом корректируется и посылается через антенну УКВ 1.4 судового комплекса АИС 1 (на фиг.2 не показано) в виде радиоимпульса на установленной радиочастоте, отличной от п.(1);
(4) Основной блок АИС 1.1 каждого судна постоянно сканирует эти отличительные радиочастоты, установленные для обмена скорректированными обобщенными пакетами информации, и сравнивает в дополнительном блоке АИС 2 свой имеемый пакет с этими, полученными с других судов, формируя пакет 1с, с теми же судами, с которыми при сравнении в блоке АИС 2 обнаруживаются большие расхождения, осуществляется изложенный выше автоматический адресный обмен с целью взаимной корректировки данных;
(5) Когда скорректированные обобщенные пакеты информации (п.(2) 1b и п.(4) 1c) в блоке АИС 2 согласованы, устанавливается синхронизированный для всех судов момент времени, наибольший из подтвержденных всеми судами, по достижении которого скорректированный обобщенный пакет информации на каждом судне поступает в бортовой компьютер 3, который должен оперативно выдать и показать одно и то же оптимальное решение по маневрированию для всех судов;
(6) Каждое судно осуществляет в назначенное время свой маневр (или сохраняет курс и скорость) в соответствии с решением п.(5) и осуществляет аналогично рабочий контроль за развитием ситуации п.(1)-п.(4), и при обнаружении опасного отклонения от предполагаемого сценария производится корректировка маневров п.(5).
В частном случае при развитии системы дальней идентификации (СДИ) (спутниковое обеспечение), которая внедряется согласно Резолюции IMO MSC.210 (81) от 19.05.2006 г. (МК СОЛАС-74), безопасное расхождение судов с использованием заявляемой системы может быть начато задолго до того, как они увидят друг друга на экране радиолокатора.
Главное преимущество предлагаемого изобретения в том, что человеческий фактор исключается из процесса обмена данными между судами. Известно много примеров, как судоводители пытались «улучшить» МППС с помощью УКВ связи и тем самым создавали опасные ситуации. Причины хорошо известны: недопонимание, языковые проблемы и ошибки в идентификации. Современный автоматический обмен данными заявляемой системы предоставляет достоверную информацию, которая может быть перепроверена и синхронизована за долю секунды.
Необходимое оборудование и программа будут работать в реальном времени, и каждый раз в процессе обмена данными программа может быть скорректирована вследствие возможных отклонений от предполагаемого развития ситуации.
На фиг.3 в навигационной прокладке (масштаб в морских милях, время указано в минутах и секундах от момента выдачи оптимального решения бортовыми компьютерами судов A, B, C) представлен пример согласованного в соответствии с предлагаемой системой решения о маневрировании для трех судов. Судно A следует курсом 037° со скоростью 17.1 уз., судно B следует курсом 102° со скоростью 15.4 уз., судно C следует курсом 330° со скоростью 09.6 уз. Если все они будут сохранять курс и скорость, то через 27 мин. предполагается опасное сближение судов A и B, через 30 мин предполагается опасное сближение судов B и C. Если суда обмениваются информацией о координатах, курсе, скорости и на вход бортового компьютера на каждом судне поступают одни и те же данные, то на шестую упреждающую минуту все они получат следующие рекомендации: судно A поворачивает вправо на курс 069° и возвращается на прежний курс через 22 мин, судно B поворачивает вправо на курс 145° и возвращается на прежний курс через 19 мин, судно C сохраняет курс и скорость. Если эти маневры будут выполнены в установленное время, то суда не будут приближаться друг к другу на расстояние менее двух миль.
В приведенном выше примере критерий безопасного расхождения на основе дистанции кратчайшего сближения (Дкр) был выбран только для облегчения объяснения использования изобретения. Интервалы между наблюдениями в относительном движении выбраны трехминутными и количество судов ограничено тремя по той же причине. Программа предотвращения опасного сближения судов в ее настоящем виде находит оптимальное решение для 10 судов. Но это количество ограничивается только ресурсами компьютера, и это реализовано на обычном серийном офисном компьютере. Возможны другие примеры реализации, такие как на базе «зоны безопасности судна» (Lamb, W.G. (1985) The Calculation of Marine Collision Risks. Journal of Navigation 38, 365-374) или оценке опасности сближения, основанной на возможном наиболее неблагоприятном маневре со стороны любого судна. Также возможен маневр изменением скорости, и программы для безопасного расхождения путем регулирования скоростью уже существуют.
Существующие и проектируемые береговые СУДС могут быть использованы в частном случае как координирующие и контролирующие центры.
Таким образом, с технической стороны проблемы все доступно для использования: быстрый и надежный обмен данными между участниками расхождения посредством описанного оборудования может быть обеспечен в ближайшем будущем, имеемое разработанное программное обеспечение для предотвращения опасного сближения судов в реальном времени тоже может быть соответствующей стороне предоставлено Заявителем в короткие сроки. В связи с этим нет необходимости в специальном компьютерном оборудовании для предотвращения столкновений судов: обычного современного бортового компьютера в общей совокупности достаточно, проблема интерфейса для связи с навигационными и коммуникационными средствами - тоже не такой большой технический вопрос (это уровень конструкторской разработки).
Перечень использованных общепринятых сокращений:
| название | год | авторы | номер документа |
|---|---|---|---|
| Тренажерный комплекс для подготовки судоводителей | 2017 |
|
RU2657708C1 |
| Система прогнозирования безопасного расхождения судов | 2022 |
|
RU2780081C1 |
| Морская система безопасности | 2019 |
|
RU2732233C2 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДНА | 2012 |
|
RU2501708C1 |
| МОРСКАЯ ГЕОИНФОРМАЦИОННАЯ ИНТЕГРИРУЮЩАЯ ПЛАТФОРМА РЕАЛЬНОГО ВРЕМЕНИ | 2023 |
|
RU2808849C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ БЕЗАВАРИЙНОГО ДВИЖЕНИЯ НАДВОДНОГО ИЛИ ПОДВОДНОГО СУДНА ПРИ НАЛИЧИИ ПОДВОДНЫХ ИЛИ НАДВОДНЫХ ПОТЕНЦИАЛЬНО ОПАСНЫХ ОБЪЕКТОВ | 2012 |
|
RU2513198C2 |
| СПОСОБ ПРЕДСТАВЛЕНИЯ СУДОВОДИТЕЛЮ ОБОБЩЕННОЙ ИНФОРМАЦИИ ДЛЯ КОНТРОЛЯ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1992 |
|
RU2077450C1 |
| Комплекс навигации и управления кораблем | 2022 |
|
RU2786251C1 |
| НАВИГАЦИОННЫЙ ТРЕНАЖЁР | 2023 |
|
RU2838905C2 |
| Способ высокоточного определения навигационных элементов движения судна | 2016 |
|
RU2643072C2 |

Изобретение относится к области информационно-коммуникационных технологий, а именно к оборудованию, обеспечивающему безопасность мореплавания на основе интенсивно развивающегося общего морского информационного пространства. Система предотвращения опасного сближения судов использует общее морское информационное пространство и содержит судовой комплекс Автоматической Идентификационной Системы (АИС), который включает основной и дополнительный блоки АИС, дополнительный бортовой компьютер, пульт управления и отображения, судовую антенну ультракоротковолновой связи и источник питания. Основной блок АИС выполнен с размещением в нем портов приема сигналов от внешних информационно-коммуникационных устройств в виде антенны, внешнего приемника, гирокомпаса, датчика скорости поворота судна, датчика дифференциальных поправок, электронной картографической навигационно-информационной системы, устройства лоцманский порт и канала дальней связи. Данный блок подключен к пульту управления и отображения, к выходу судовой антенны ультракоротковолновой связи и источнику питания. Достигается создание системы предотвращения опасного сближения судов, обеспечение автоматического обмена данными между всеми заинтересованными судами. 3 ил.
Система предотвращения опасного сближения судов, использующая общее морское информационное пространство, содержащая судовой комплекс Автоматической Идентификационной Системы, включающий основной блок Автоматической Идентификационной Системы, пульт управления и отображения, судовую антенну ультракоротковолновой связи и источник питания, при этом основной блок Автоматической Идентификационной Системы выполнен с размещением в нем портов приема сигналов от внешних информационно-коммуникационных устройств в виде антенны GPS/GLONASS, внешнего приемника GPS/GLONASS, гирокомпаса, датчика скорости поворота судна, датчика дифференциальных поправок, электронной картографической навигационно-информационной системы, устройства лоцманский порт и канала дальней связи, а сам данный блок подключен к пульту управления и отображения, к выходу судовой антенны ультракоротковолновой связи и источнику питания, отличающаяся тем, что она дополнительно содержит бортовой компьютер и дополнительный блок Автоматической Идентификационной Системы, выполненный с размещением в нем портов приема сигналов от внешних информационно-коммуникационных устройств в виде радиолокационной станции и средств автоматической радиолокационной прокладки, а также и сигналов от основного блока Автоматической Идентификационной Системы, причем данный дополнительный блок подключен к бортовому компьютеру, пульту управления и отображения и судовой антенне ультракоротковолновой связи.
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СУДОВОЙ НАВИГАЦИИ | 2010 |
|
RU2444026C1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ СУДОВ | 1991 |
|
RU2042212C1 |
| НОЖНИЦЫ ДЛЯ РЕЗКИ ЛИСТОВОГО МАТЕРИАЛА | 0 |
|
SU212011A1 |

