112
Изобретение относится к электротехнике, в частности к автоматизированному электроприводу на базе вентильных электродвигателей.
Целью изобретения является улучше ние виброакустических характеристик электропривода путем снижения пульсаций электромагнитного момента.
На чертеже представлена функциональная схема вентильного электропри вода.
.Вентильный электропривод (фиг.1) содержит синхронную электрическую машину 1, якорная обмотка которой подключена к выходу тиристорного преоб- разователя 2 частоты, блок 3 импульс но-фазового управления тиристорным преобразователем, выходы которого подключены к управляющим входам пре
образователя частоты и дополнительны входам датчика 4 напряжения, информационные входы подключены к выходам датчика 5 положения ротора, а к уп- раляющему входу подключены последовательно соединенные задатчик 6 режима суммирующий элемент 7 и регулятор 8 тока, при этом к второму входу сумми рукнцего элемента 7 подключен выход множителя 9, первый вход которого соединен с выходом датчика 4 напряже ния, а второй вход соединен с выходом датчика 10 тока, включенного на входе тиристорного преобразователя 2 частоты, причем выходы датчика 5 положения ротора соединены с основными входами датчика 4 напряжения.
Датчик 4 напряжения, содержащий аналоговый коммутатор и сумматор, является устройством, осуществляющим модуляцию этого сигнала импульсным сигналом, поступающим от блока 3 импульсно-фазового управления преоб- разователем по выходной частоте, и суммирование по модулю полученных сигналов положительной и отрицательной полярностей, в результате чего выходной сигнал оказывается пропорциональным ЭДС электрической машины, приведенной к звену постоянного тока преобразователя по схеме выпрямитель инвертор. Выходной сигнал датчика 5 положения ротора, выполненного по типу индукционной машины с внутренним каскадом, постоянен по амплитуде во всем диапазоне изменения частоты вращения. В качестве датчика 5 положения ротора могут быть использованы любые другие типы датчиков с выход.
О
25
30
ным сигналом, совпадающим по форме
с ЭДС машины, -и неизменным по ампли-
гуде напряжением.
Задатчик 6 режима может быть выполнен в виде потенциометра, подключенного к источнику питания.
Суммирующий элемент 7 может быть выполнен, например, в виде двух резисторов, подключенных к входу операционного усилителя,
Регулятор 8 тока может быть выполнен на операционном усилителе с обратными связями.
Тиристорный преобразователь 2 может быть выполнен как по схеме выпрямитель - инвертор, так и по схеме непосредственного преобразователя, и включать в себя систему импульсно- фазового управления.
Напряжение с выхода датчика 5 положения ротора подается на вход аналогового коммутатора датчика 4 напряжения. Аналоговй коммутатор управляется шастифазной системой импульсов выходной частоты от блока 3 им- пульсно-фазового управления преобразователем.
Множитель 9 может быть выполнен, например, на основе айалогового пере
множителя .
Датчик 10 тока может быть выполнен в виде трансформаторов тока, включенных на входе преобразователя. Вент)Я льный электропривод работает
35 следующим образом. I
С задатчика 6 режима сигнал поступает на первый вход суммирующего элемента 7. Выходной сигнал с датчика 5
40 положения ротора поступает на вход датчика 4 напряжения и одновременно в блок 3 импульсно-фазового управления преобразователем. На другой вход датчика 4 напряжения подаются управ45 ляющие сигналы с учетом угла опережения отпирания тиристоров по выходной частоте. Выходной сигнал датчика 4 напряжения при этом оказывается пропорциональным ЭДС Е электрической
JQ машины I, приведенной к звену постоянного тока для преобразователя по схеме вьшрямитель - инвертор. А так как амплитуда входного сигнала не зависит от частоты вращения п, то ходной сигнал оказывается пропорциональным
. Этот
п
сигнал поступает
на вход множителя 9, на другой вход
которого поступает сигнал от датчика 10 тока. Выходной сигнал множителя 9, пропорциональный мгновенному значению электромагнитного момента электрической машины 1, поступает на второй вход суммирующего элемента 7. Результирующий сигнал с выхода суммирующего элемента 7 поступает на вход регулятора 8 тока, который, воздействуя на блок 3 импульсно-фазово- го управления преобразователем, формирует необходимую форму кривой тока двигателя 1, обеспечивающую сглаживание пульсаций электромагнитного момента.
Точнее измеряется мгновенное значение электромагнитного момента и благодаря этому на 20-30% снижаются его пульсации. Поскольку пульсации момента существенно влияют на виброакустические характеристики электропривода, то их снижение улучшает указанные характеристики.
Использование датчика положения ротора, формирующего сигнал, пропорциональный отношению ЭДС машины к частоте ее вращения, исключает необходимость в использовании датчика частоты вращения, делителя, приводит к упрощению множителя. Дополнительно упрощается устройство в целом.
Редактор Л.Повхан
Составитель М.Сон Техред Л.Сердюкова
Заказ 394/58
Тираж 661Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
fO
J5
938164
Формула изобретения
Вентильный электропривод, содержащий синхронную электрическую машину, якорная обмотка которой подключена к выходу тиристорного преобразователя частоты, датчик напряжения с основным и дополнительным входами, блок импульсно-фазового управления тИрис- торным преобразователем, выходы которого подключены к управляющим входам преобразователя частоты и допол- нительньум входам датчика напряжения, а информационные входы, подключены к выходам датчика положения ротора, последовательно соединенные задатчик режима, суммирующий элемент и регулятор тока, выход которого подключен к управляющему входу блока импульсно- фазового управления, при этом к второму входу суммирующего элемента подключен выход множителя, первый вход которого соединен с выходом датчика напряжения, а второй вход соединен с выходом датчика тока, включенного на входе тиристориого преобразователя частоты, отличающийся тем, что, с целью улучшения виброакустических характеристик электропривода путем снижения пульсаций электромагнитного момента, датчик положения ротора выполнен по типу индукционной машины с внутренним каскадом, выходы которой подключены к основным входам датчика напряжения.
20
25
30
Корректор М.Демчик
| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электропривод | 1983 |
|
SU1160519A1 |
| Электропривод | 1985 |
|
SU1309244A1 |
| Устройство управления пуском асинхронного двигателя | 2020 |
|
RU2737953C1 |
| Вентильный электропривод | 1989 |
|
SU1677838A1 |
| Электропривод | 1985 |
|
SU1277346A1 |
| Частотно-управляемый электропривод | 1986 |
|
SU1374392A1 |
| Электропривод с асинхронной машиной с фазным ротором | 1975 |
|
SU610275A1 |
| Устройство для управления асинхронным электроприводом | 1979 |
|
SU788325A1 |
| Электропривод | 1986 |
|
SU1372580A1 |
| Устройство для управления электроприводом переменного тока | 1980 |
|
SU983958A1 |
Изобрет.ение относится к электротехнике. Целью изобретения является улучшение виброакустических характеристик электропривода. Вентиль- электропривод содержит синхронную машину (СМ) 1 с датчиком 5 положения ротора СМ 1. Якорная обмотка СМ I подключена к выходу тиристорно- го преобразователя (ТП) 2 частоты. К управляющим входам ТП 2 подключены выходы блока 3 импульсно-фазового управления, соединенного с дополнительными входами датчика 4 напряжения. Основные входы датчика 4 соединены с выходами датчика 5. Информационные входы бдока 3 подключены к выходам датчика 5, а к управляющим входам блока 3 подключены последовательно задатчик 6 режима, суммирующий элемент (СЭ) 7, и регулятор 8 тока. К второму входу СЭ 7 подключен выход множителя (М) 9. Первый вход М 9 соединен с выходом датчика 5, второй вход - с выходом датчика 10, включенного на входе ТП 2. Датчик 5 вьтолнен в виде датчика с независимьм от частоты вращения выходным напряжением синусоидальной формы по типу индукционной машины с внутренним каскадом. В электроприводе на выходе датчика 4 формируется сигнал, пропорциональный отношению Е/п. Этот сигнал поступает на вход М 9, на другой вход которого подает сигнал от датчика 10. Выходной сигнал М 9, пропорциональный величине электромагнитного момента, поступает на второй вход СЭ 7- С выхода СЭ 7 сигнал поступает на вход регулятора 8, который, воздействуя на блок 3, формирует необходимую форму кривой тока СМ 1, обеспечивающую сглаживание пульсаций электромагнитного момента. Использование датчика 5, выполненного по типу индукционной машины с внутренним каскадом, позволяет исключить датчик частоты вращения, делитель, т.е. упростить кострукцию вентильного электропривода. I ил. с & (Л to 00 00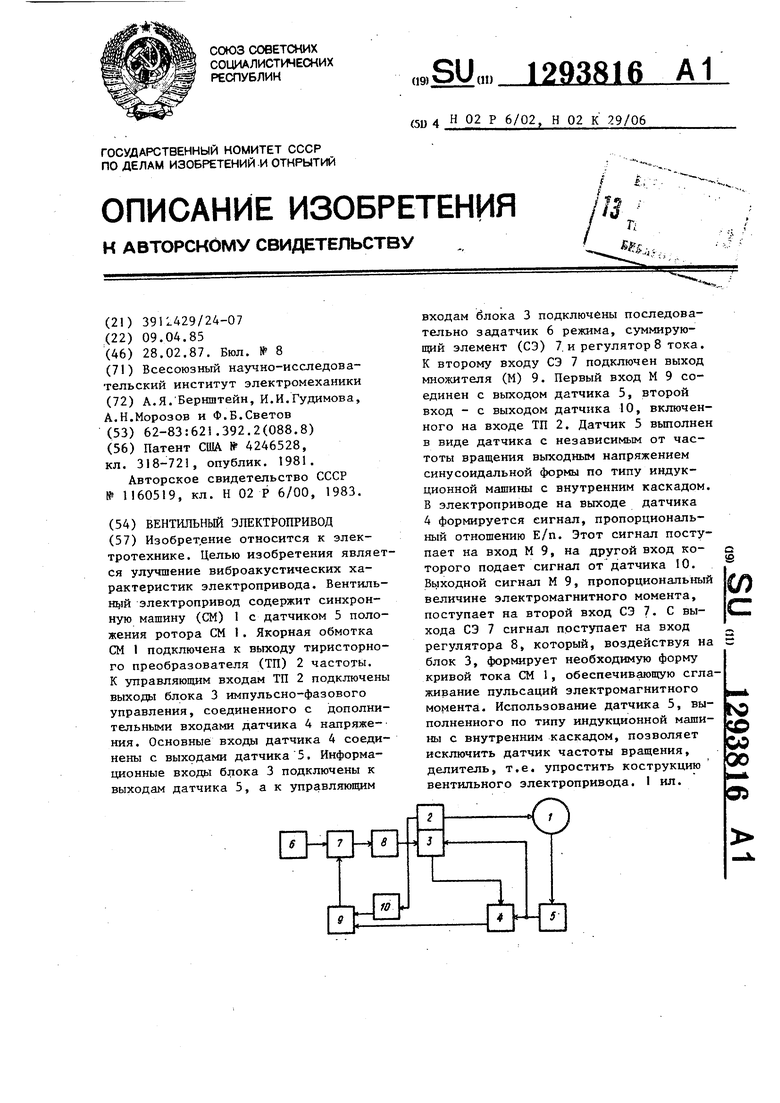
| Патент США № 4246528, кл | |||
| Способ изготовления фасонных резцов для зуборезных фрез | 1921 |
|
SU318A1 |
| Приспособление для изготовления в грунте бетонных свай с употреблением обсадных труб | 1915 |
|
SU1981A1 |
| Вентильный электропривод | 1983 |
|
SU1160519A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
