11293820 2
Изобретение относится к электро- демпфирования od в сторону максималь технике, в частности к автоматическому управлению энергетическими сисньгх значений, обеспечивается при на стройке коэффициента Kif в соответствии с выражением
темами .
Целью изобретения является повыше- 5 ние статической и динамической устойчивости при широком диапазоне изменения режима и параметров энергосистемы и улучшение показателей качества электроэнергии в процессе адаптации.
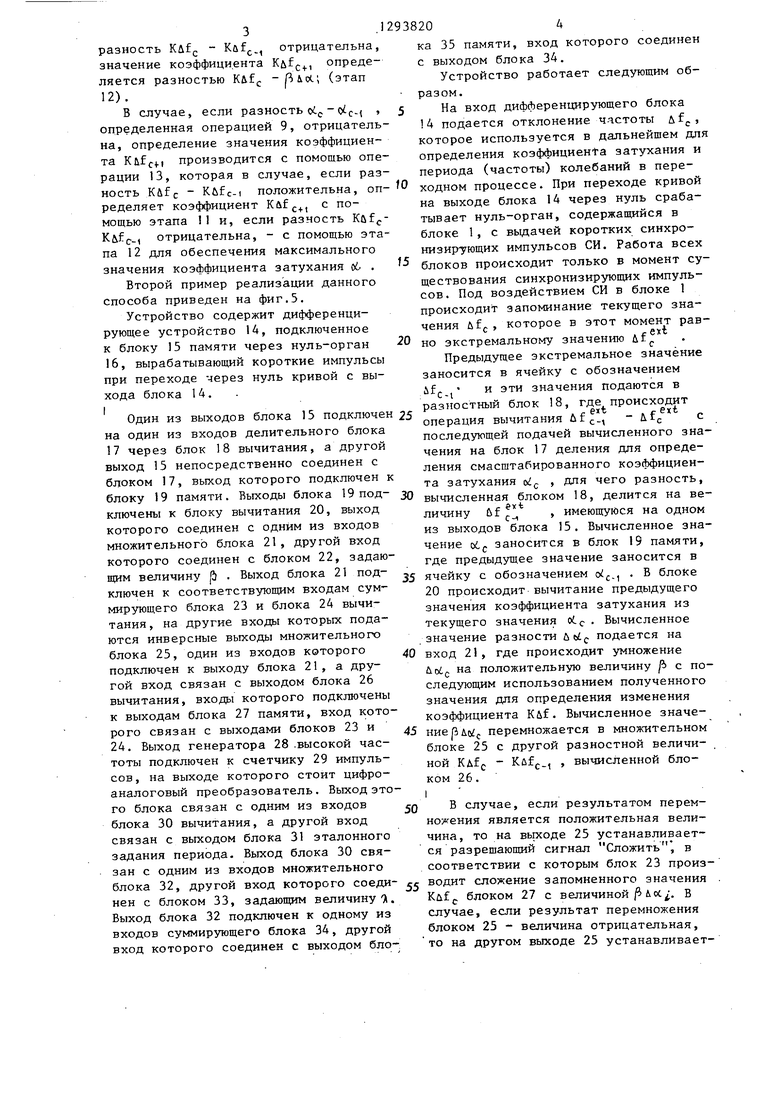
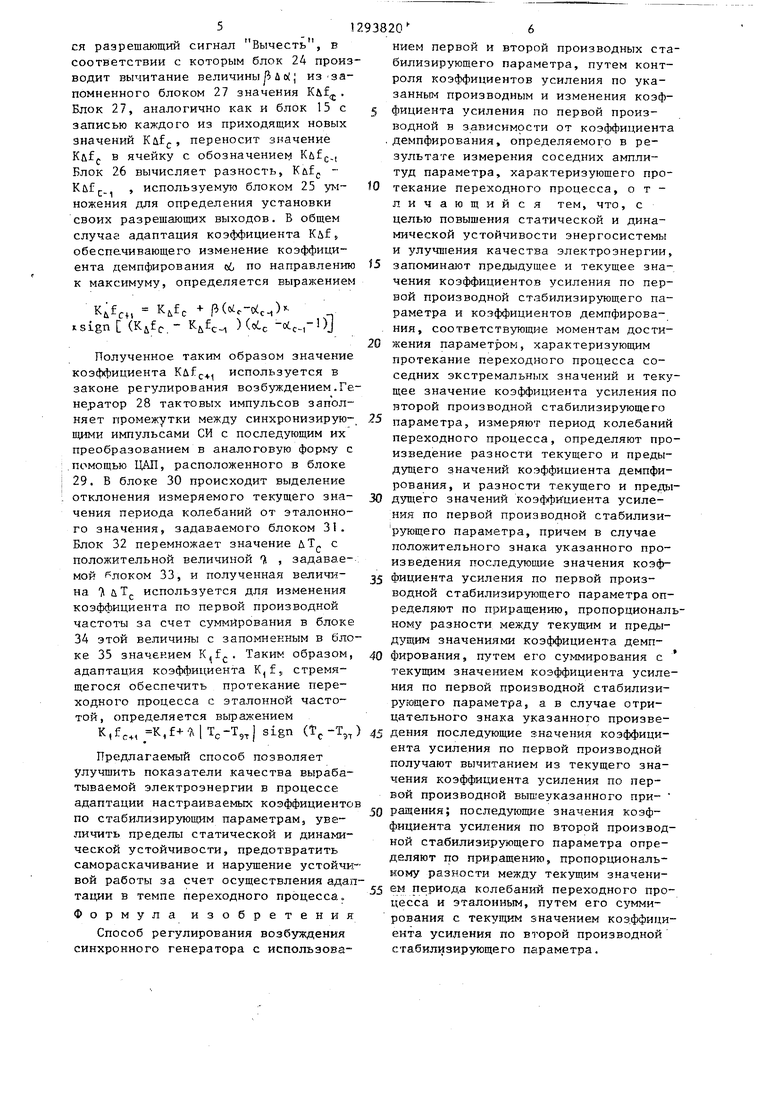
На фиг.1 показана область устойчивости с нанесенными линиями разных частот колебаний; на фиг.2 - зависимость частоты колебаний от коэффициньгх значений, обеспечивается при настройке коэффициента Kif в соответствии с выражением
+pkc-o:e., I sign(otc-ud,- )(Kufc - ,)
fO
I
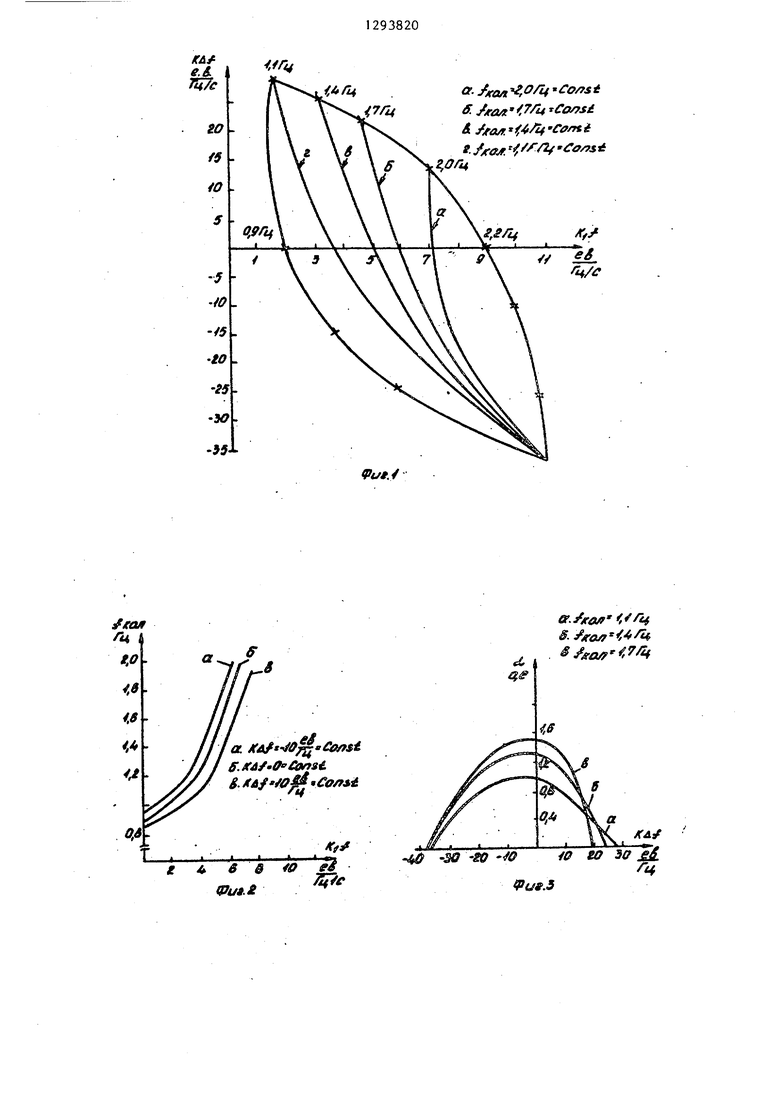
Реализация данного способа с применением вычислительной техники может быть осуществлена в соответствии с алгоритмом, приведенным на фиг.4.
С помощью операции I выявляется
достижение отклонени ем частоты ufj,
eKt
ента К,,; на фиг.З - зависимость ко- 5 своего экстремального значения bf.
t
эффициента демпфирования от изменения Kuf; на фиг.4 - алгоритм, иллюстрирующий пример реализации способа с применением вычислительной техники; на фиг.З - схема устройства, реализующего предлагаемый способ.
В качестве стабилизирующих параметров используются коэффициенты по отклонению и первой производной частоты Kuf и K,f соответственно, пропорциональные первой и второй производным (р 5 и р S) угла генератора со- ответственно.
и запоминание предшествующего значения ufc-i Расчет коэффициентов Kif и осуществляется только в момент достижения своего очередного
20 экстремального значения U f
При этом происходит определение (операция 2) временного интервала Т между моментами достижения текущего и предыдущего экстремальных значений
25 uf (,. Операция 3 определяет разность uTj, между текущим значением полупериода Tj. и эталонньм Т , а операция 4 определяет величину приращения
„ , используемую для настройки коДля обеспечения протекания адапта- ., ,ri/ с
30 эффициента K,f (этап 5), используе- ции в темпе переходного процесса каж- „
. . V с V с мого для обеспечения эталонной час- дыи из коэффициентов Кл и K,f на- . - п
тоты колебании. Далее производится страивается для поддержания парамет-,, Г, ..
настройка коэффициента Kuf, для чего этап 6 определяет значение коэфра, с которым он непосредственно свя-г
...,. е-lU ldiiw wiiL/c.uc:jj/i nciMClznnc::
зан. Гак коэффициент К,г изменяется . , ,
эс фициента демпфирования об с помощью
в зависимости от рассогласования меж-. 35 м ч- н w -ч
ду текущей частотой переходного процесса и эталонной, (фиг,2).
Коэффициент Kaf настраивается в зависимости от изменения коэффициен- деления полученной разности на та демпфирования для обеспечения мак- 0 значение f,., . Операция 7 опреде- симум кривой (фиг.З).
Минимальное рассогласование между текущей частотой и эталонной обеспечивается в случае настройки коэффициента в соответствии с выраже 45
вычисления разности между соседними экстремальными значениями и получением масштабированного значения об за
ляет значение изменения коэффициента демпфирования Ь oif, -Ы;., под воздействием предыдущего изменения коэффициента Kuf с - Kuf.., . .
Операция 8 определяет приращение
/ЗйЫрДЛя коэффициента Kuf,.. В случае.
нием
/ЗйЫрДЛя коэффициента Kuf,.. В случа
V 1 V J. л. п /т т /е, о«гт т ч если величина йл,- является положи- K(ic+i i c /™с Чт/sign(.,.),
тельной, что определяется операцией 9, дальнейшее определение действия
где X - коэффициент, используемый для определения приращения на каждом шаге настройки;
Tj. - значение измеренного периода колебаний переходного процесса;
период эталонной частоты колебаний.
Изменение коэффициента , обеспечивающего изменение коэффициента
демпфирования od в сторону максималь
ньгх значений, обеспечивается при настройке коэффициента Kif в соответствии с выражением
+pkc-o:e., I sign(otcud,- )(Kufc - ,)
I
Реализация данного способа с применением вычислительной техники может быть осуществлена в соответствии с алгоритмом, приведенным на фиг.4.
С помощью операции I выявляется
достижение отклонени ем частоты ufj,
eKt
своего экстремального значения bf.
своего экстремального значения bf.
и запоминание предшествующего значения ufc-i Расчет коэффициентов if и осуществляется только в момент достижения своего очередного
экстремального значения U f
При этом происходит определение (операция 2) временного интервала Т между моментами достижения текущего и предыдущего экстремальных значений
uf (,. Операция 3 определяет разность uTj, между текущим значением полупериода Tj. и эталонньм Т , а операция 4 определяет величину приращения
м ч- н w -ч
деления полученной разности на значение f,., . Операция 7 опреде-
вычисления разности между соседними экстремальными значениями и получением масштабированного значения об за
деления полученной разности на 0 значение f,., . Операция 7 опреде-
45
ляет значение изменения коэффициента демпфирования Ь oif, -Ы;., под воздействием предыдущего изменения коэффициента Kuf с - Kuf.., . .
Операция 8 определяет приращение
/ЗйЫрДЛя коэффициента Kuf,.. В случае.
если величина йл,- является положи-
если величина йл,- является положи-
тельной, что определяется операцией 9, дальнейшее определение действия о
приращением (uct; производится операцией 10, которой осуществляют опредеение знака предшествующего изменения Kuf - ., , под воздействием которого фиксируется операцией 9 знак
изменения коэффициента демпфирования. В случае, если разность Kuf. - Kui(--i окажется положительной, значение коэффициента Kufc,.) определяется суммой Kufc (этап 11), Если же
разность Кд(, - Kaf.,, отрицательна, значение коэффициента Kuf,, определяется разностью Kufj, -ftiot; (этап 12).
В случае, если разность определенная операцией 9, отрицательна, определение значения коэффициента Kbfc4.| производится с помощью операции 13, которая в случае, если разность Kufс - Kufc-i положительна, определяет коэффициент с помощью этапа 11 и, если разность K&ff., отрицательна, - с помощью этапа 12 для обеспечения максимального значения коэффициента затухания об .
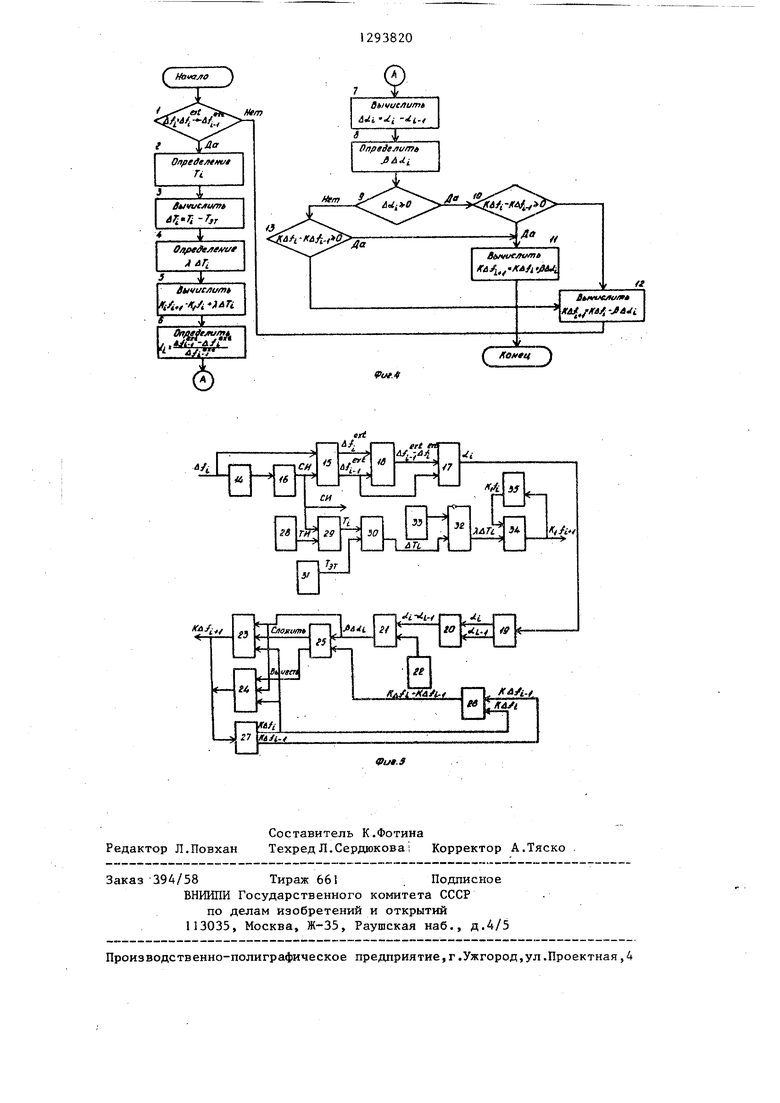
Второй пример реализации данного способа приведен на фиг,5,
Устройство содержит дифференцирующее устройство 14, подключенное к блоку 15 памяти через нуль-орган 16, вырабатывающий короткие импульсы при переходе через нуль кривой с выхода блока 14.
Один из выходов блока 15 подключе иа один из входов делительного блока 17 через блок 18 вычитания, а другой выход 15 непосредственно соединен с блоком 17, выход которого подключен блоку 19 памяти. Выходы блока 19 подключены к блоку вычитания 20, выход которого соединен с одним из входов множительного блока 21, другой вход которого соединен с блоком 22, задающим величину PJ . Выход блока 21 подключен к соответствующим входам суммирующего блока 23 и блока 24 вычитания , на другие входы которых подаются инверсные выходы множительного блока 25, один из входов которого подключен к выходу блока 21, а другой вход связан с выходом блока 26 вычитания, входы которого подключены к выходам блока 27 памяти, вход которого связан с выходами блоков 23 и 24. Выход генератора 28 .высокой частоты подключен к счетчику 29 импульсов, на выходе которого стоит цифро- аналоговый преобразователь. Выход этого блока связан с одним из входов блока 30 вычитания, а другой вход связан с выходом блока 31 эталонного задания периода. Выход блока 30 связан с одним из входов множительного блока 32, другой вход которого соединен с блоком 33, задающим величину Ti. Выход блока 32 подключен к одному из входов суммирующего блока 34, другой вход которого соединен с выходом бло938204
ка 35 памяти, вход которого соединен с выходом блока 34.
Устройство работает следующим образом.
5 На вход дифференцирующего блока 4 подается отклонение частоты &fp, которое используется в дальнейщем для определения кoэффициeнta затухания и периода (частоты) колебаний в пере0 ходнем процессе. При переходе кривой на выходе блока 14 через нуль срабатывает нуль-орган, содержащийся в блоке 1, с выдачей коротких синхронизирующих импульсов СИ. Работа всех
блоков происходит только в момент существования синхронизирующих импульсов. Под воздействием СИ в блоке 1 происходит запоминание текущего значения uf(; , которое в этот момент рав0 но экстремальному значению &f
Предыдущее экстремальное значение заносится в ячейку с обозначением
if
c-i
и эти значения подаются в
5
разностный блок 18, где происходит операция вычитания uf с-,
последующей подачей вычисленного значения на блок 17 деления для определения смасштабированного коэффициента затухания о, , для чего разность,
вычисленная блоком 18, делится на ве. , ext личину bf j. имеющуюся на одном
из выходов блока 15. Вычисленное значение обр заносится в блок 19 памяти, где предыдущее значение заносится в
5 ячейку с обозначением ,, . В блоке 20 происходит вычитание предыдущего значения коэффициента затухания из текущего значения otc Вычисленное значение разности йЫ. подается на
0 вход 21, где происходит умножение
Ы-с- на положительную величину fb с последующим использованием полученного значения для определения изменения коэффициента Kif. Вычисленное значе5 ниерлс перемножается в множительном блоке 25 с другой разностной величиной KAfg - вычисленной блоком 26. I
0 В случае, если результатом перемножения является положительная величина, то на вьрсоде 25 устанавливается разрешающий сигнал Сложить в соответствии с которым блок 23 произ водит сложение запомненного значения . Kufj. блоком 27 с величиной/ Лес. В случае, если результат перемножения блоком 25 - величина отрицательная, то на другом выходе 25 устанавливается разрешающий сигнал Вычесть, в соответствии с которым блок 24 производит вычитание величины J и о j из-запомненного блоком 27 значения Кд, Блок 27, аналогично как и блок 15 с записью каждого из приходящих новых значений Kuf, переносит значение Kufj, в ячейку с обозначением Kuf,, Блок 26 вычисляет разность, Kufj - Kuf... , используемую блоком 25 у ножения для определения установки своих разрешающих выходов. В общем случае адаптация коэффициента Kuf, обеспечивающего изменение коэффициента демпфирования ci, по направлению к максимуму, определяется выражением
- (с-Ыс
,)
Ь Ctl и I, I --1-1 -,
.sign (. - ) с
Полученное таким образом значение коэффициента Kuf(-+i используется в законе регулирования возбуждением.Генератор 28 тактовых импульсов заполняет промежутки между синхронизирую-, щими импульсами СИ с последующим их преобразованием в аналоговую форму с .помощью ЦАП, расположенного в блоке 29. В блоке 30 происходит выделение отклонения измеряемого текущего значения периода колебаний от эталонного значения, задаваемого блоком 31. Блок 32 перемножает значение дТ с положительной величиной 1 , задавав-: мой РЛОКОМ 33, и полученная величина 1 Л Tj. используется для изменения коэффициента по первой производной частоты за счет суммирования в блоке 34 этой величины с запомненным в блоке 35 значением K,f. Таким образом, адаптация коэффициента K,f.j стремящегося обеспечить протекание переходного процесса с эталонной частотой, определяется вьфажением K,f
нием первой и второй производных стабилизирующего параметра, путем контроля коэффициентов усиления по указанным производным и изменения коэффициента усиления по первой производной в зависимости от коэффициента демпфирования, определяемого в результате измерения соседних амплитуд параметра, характеризующего протекание переходного процесса, отличающий ся тем, что, с целью повышения статической и динамической устойчивости энергосистемы и улучшения качества электроэнергии, запоминают предьщущее и текущее значения коэффициентов усиления по первой производной стабилизирующего параметра и коэффициентов демпфирования, соответствующие моментам достижения параметром, характеризующим протекание переходного процесса соседних экстремальных значений и текущее значение коэффициента усиления по второй производной стабилизирующего параметра, измеряют период колебаний переходного процесса, определяют произведение разности текущего и предыдущего значений коэффициента демпфирования, и разности текущего и преды30 дуп1его значений коэффи циента усиления по первой производной стабилизирующего параметра, причем в случае положительного знака указанного произведения последующие значения коэф35 фициента усиления по первой производной стабилизирующего параметра определяют по приращению, пропорциональному разности между текущим и предыдущим значениями коэффициента демп40 фирования, путем его суммирования с текущим значением коэффициента усиления по первой производной стабилизирующего параметра, а в случае отри20
25
дательного знака указанного произве K,f+ I Т(,-Тд j sign (, ) 45 дения последующие значения коэффициента усиления по первой производной получают вычитанием из текущего значения коэффициента усиления по первой производной вышеуказанного при- 50 ращения; последующие значения коэффициента усиления по второй производной стабилизир)ующего параметра определяют по приращению, пропорциональному разности между текущим значени- 55 ем периода колебаний переходного процесса и эталонным, путем его сумми- Формулаизобретения рования с текущим значением коэ.ффициСпособ регулирования возбуждения ента усиления по второй производной синхронного генератора с использова- стабилизирующего параметра.
Предлагаемый способ позволяет улучшить показатели качества вырабатываемой электроэнергии в процессе адаптации настраиваемых коэффициентов по стабилизирующим параметрам, увеличить пределы статической и динамической устойчивости, предотвратить самораскачивание и нарушение устойчивой работы за счет осуществления адаптации в темпе переходного процесса.
нием первой и второй производных стабилизирующего параметра, путем контроля коэффициентов усиления по указанным производным и изменения коэффициента усиления по первой производной в зависимости от коэффициента демпфирования, определяемого в результате измерения соседних амплитуд параметра, характеризующего протекание переходного процесса, отличающий ся тем, что, с целью повышения статической и динамической устойчивости энергосистемы и улучшения качества электроэнергии, запоминают предьщущее и текущее значения коэффициентов усиления по первой производной стабилизирующего параметра и коэффициентов демпфирования, соответствующие моментам достижения параметром, характеризующим протекание переходного процесса соседних экстремальных значений и текущее значение коэффициента усиления по второй производной стабилизирующего параметра, измеряют период колебаний переходного процесса, определяют произведение разности текущего и предыдущего значений коэффициента демпфирования, и разности текущего и предыдуп1его значений коэффи циента усиления по первой производной стабилизирующего параметра, причем в случае положительного знака указанного произведения последующие значения коэффициента усиления по первой производной стабилизирующего параметра определяют по приращению, пропорциональному разности между текущим и предыдущим значениями коэффициента демпфирования, путем его суммирования с текущим значением коэффициента усиления по первой производной стабилизирующего параметра, а в случае отри
///V
.
a. jfOA 0/14 Co/fs rf
S.ffM 7/l4 Co Sf
& fa/r.f,4/t4 Cfff7tit
f Л-ЛЛ
/
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулирования возбуждения синхронного генератора | 1987 |
|
SU1603520A1 |
| Способ автоматического регулирования возбуждения синхронного генератора | 1980 |
|
SU892640A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ НАСТРОЙКИ СИСТЕМ РЕГУЛИРОВАНИЯ | 1971 |
|
SU297032A1 |
| Устройство для регулирования возбуждения синхронного генератора | 1988 |
|
SU1515329A2 |
| Устройство для регулирования возбуждения синхронного генератора | 1985 |
|
SU1325658A1 |
| СПОСОБ УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМ ОБЪЕКТОМ | 1989 |
|
RU2017196C1 |
| ПРОПОРЦИОНАЛЬНЫЙ ЭКСТРЕМАЛЬНЫЙ РЕГУЛЯТОР | 1965 |
|
SU174249A1 |
| Устройство для активного демпфирования упругих колебаний элементов конструкции вращающегося объекта | 1983 |
|
SU1134927A1 |
| СПОСОБ УПРАВЛЕНИЯ АНТИБЛОКИРОВОЧНОЙ И ПРОТИВОБУКСОВОЧНОЙ СИСТЕМОЙ (АБС/ПБС) ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2324611C2 |
| Фазовый манипулятор | 1982 |
|
SU1053320A1 |
Изобретение относится к области электротехники, в частности к автоматическому управлению энергетическими системами. Целью изобретения является повышение статической -и динамической устойчивости, улучшение качества электроэнергии. Для этого используются разные законы адаптации коэффициентов усиления по первой и второй производной стабилизирующего параметра, которые формируют путем измерения периода колебаний переходного процесса, вызванного естественными возмущениями на шинах генерато- ра, запоминания текущего и предыдущего значений коэффициентов усиления по первой производной стабилизирующего параметра и коэффициента демпфирования, запоминания текущего зна-: чение коэффициента усиления по второй производной стабилизирующего параметра, определения произведения разности текущего и предьщущего значений коэффициента демпфирования и разности текущего и предыдущего значений коэффициента усиления по первой производной стабилизирующего па- раметра. При этом в случае положительного знака указанного произведения последующие значения коэффициента усиления по первой производной стабилизирующего параметра определяют по приращению, пропорциональному разности между текущим и предыдущим значениями коэффициента демпфирования, путем его суммирования с текущим значением коэффициента усиления по первой производной стабилизирующего параметра. В случае отрицательного знака указанного произведения последующие значения коэффициента усиления по цервой производной получают вычитанием из текущего значения коэффициента усиления по первой производной указ анного приращения. Последующие значения коэффициента усиления по второй производной стабилизирующего параметра определяют по приращению, пропорциональному разности между текущим значением периода колебаний переходного процесса и эталонным, путем его суммирования с текущим значением коэффициента усиления по второй производной стабилизирующего параметра. 5 ил. (О (Л
a XA/ Of C0/fSi. g.i(
g. /t&f & CO/fA
h
Kt
в &
tPi/.
O ef TZpc
в .Ла/у /2# S.
jy Дt mI-4 -5f7 -SO 10
Uf5
ffem
tiiittutjH/тл Л9У,./Г-4Л1АЦ
ft
Яыт ллия
С Яонвц J
.
Af.
(6
СИ
45
erf
М-/
СИ
-«Mv
гз
Саокч/т
fiA4i
14
27
Xtfi
ftfl-4
Составитель К.Фотина Редактор Л.Повхан Техред Л.Сердюкова Корректор А.Тяско .
Заказ 39А/58 Тираж 661Подписное
ВНИИПИ Государственного комитета СССР .
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие,г.Ужгород,ул.Проектная,4
а
ert ert
;
У7
В
UTL
л/Л /
to
jfL
«
/УМ-/.
л-д/г
| Электронное моделирование, № 6, с.64-72 | |||
| РЕГУЛЯТОР ВОЗБУЖДЕНИЯ СИНХРОННОЙ МАШИНЫО П т в fc&M Й'-1:>&ЁРТОЗ^ | 1971 |
|
SU428514A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
