четвертый ключ и запоминающий элемент, выход генератора импульсов дискретизации подключен к второму входу четвертого ключа, вход блока
1ПД927
вьщеления максимального значения сигнала подключен к второму входу амплитудного детектора, а выход к выходу запоминающего элемента.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления объектом с присоединенным упругодеформируемым элементом | 1986 |
|
SU1403015A1 |
| Система стабилизации объекта с присоединенным упругим элементом | 1988 |
|
SU1525676A1 |
| Система стабилизации объекта с присоединенным упругим элементом переменной жесткости | 1988 |
|
SU1603340A1 |
| Устройство для оптимального управления работой инерционного объекта с присоединенным упругим элементом | 1985 |
|
SU1381445A1 |
| Система терминального управления упругим объектом | 1987 |
|
SU1434403A1 |
| Устройство для управления объектом с присоединенными упругодеформируемыми элементами | 1989 |
|
SU1767476A1 |
| УСТРОЙСТВО ДЛЯ УСПОКОЕНИЯ КОЛЕБАНИЙ УПРУГОГО ЭЛЕМЕНТА ПЕРЕМЕННОЙ ЖЕСТКОСТИ | 2001 |
|
RU2192035C1 |
| Устройство для оптимального управления работой инерционного объекта с присоединенным упругим элементом | 1989 |
|
SU1659981A2 |
| Адаптивное устройство для гашения колебаний упругого элемента переменной жесткости | 1989 |
|
SU1596306A1 |
| Устройство для успокоения колебаний упругого элемента переменной жесткости | 1988 |
|
SU1587465A1 |
Изобретение относится к области управления угловым движением подвижных объектов с нежесткой крнстру цией и может- быть преимущественно использовано при проектировании и создании перспективных систем управ ления угловым движением объектов такого класса. Известны устройства демпфирования для успокоения относительного возмущающего движения гибких элемен тов конструкции вращающегося объекта , построенные с использованием демпферов, которые с одной стороны крепятся к относительно неподвижным частям конструкции, а с другой к подвижным и предназначены для преобразования кинетической энергии подвижных элементов в какой-либо иной вид энергии. Использование демпфирующих свойств трения в шарнирных соединениях та-кже можно отнести к данному способу демпфирования l , 2 и з. Недостатком таких устройств является низкое быстродействие в тех случаях, когда специально используе мые демпферы или (и) естественное демпфирование, обеспечиваемое конструктивными особенностями объекта не в состоянии обеспечить требуемых временных характеристик переходного процесса успокоения возмуа а ощего движения гибких элементов конструкции , а использование более мощных демпферов либо нежелательно, либо вообще невозможно. Наиболее близким к данному явля ется устройство для демпфирования лебаний, содержащее инвертор, сумматор, первый дифференцирующий бло две релейных элемента, первый элем И и последовательно соединенные бл исполнительных органов, объект уп-- равления, датчик угловой скорости и второй дифференцирующий блок 43 Недостаток этого устройства малое быстродействие. Цель изобретешгя - повышение быстродействия. Для достижения цели устройство, содержащее инвертор , сумматор, первый дифференцирующий блок, два релейных элемента, первый элемент И и последовательно соединенные блок исполнительных органов, объект управления , датчик угловой скорости и второй дифференцирующий блок, дополнительно содержит последовательно соединенные первый источник постоянного напряжения и первый ключ, последовательно Соединенные элемент несовпадения, второй ключ и третий рехюйный элемент, последовательно соединенные формирователь модуля сигнала, блок выделения максимального значения сигнала, компаратор и второй элемент И, выход первого источника постоянного напряжения соединен с входом инвертора выход которого соединен с входом третьего ключа, выход второго дифференцирующего блока подключен к первому входу сумматора, второй вход которого соединен с выходами первого и третьего ключей, выход второго источника постоянного напряжения соединен с вторьм входом компаратора, выход третьего релейного элемента соединен с первьм входом первого элемента И и с инверсным входом второго элемента И, первый вход которого подключен к второму входу первого элемента И, выход второго элемента И соединен с первым входом блока исполнительных органов и вторым входом первого ключа, выход первого элемента И соединен с вторыми входами блока исполнительных органов и третьего ключа, выход сумматора соединен с j входами формирователя модуля сигнала, первого дифференцирующего блока и первого релейного элемента, выход первого релейного элемента подключен к первому входу элемента несовпадения, а выход первого дифференцирующего блока соединен с вторым входом второго ключа и через второй релейньй элемент - с втрым входом элемента несовпадения.
Елок выделения максимального значения сигнала содержит последо- вательно соединенные генератор импульсов дискретизации, амплитудный детектор, четвертый ключ и запоминающий элемент, выход генератора импульсов дискретизации подключен к второму входу четвертого ключа , вход блока выделения максимального значения сигнала подключен к второму входу амплитудного детектора, а выход - к выходу запоминающего элемента.
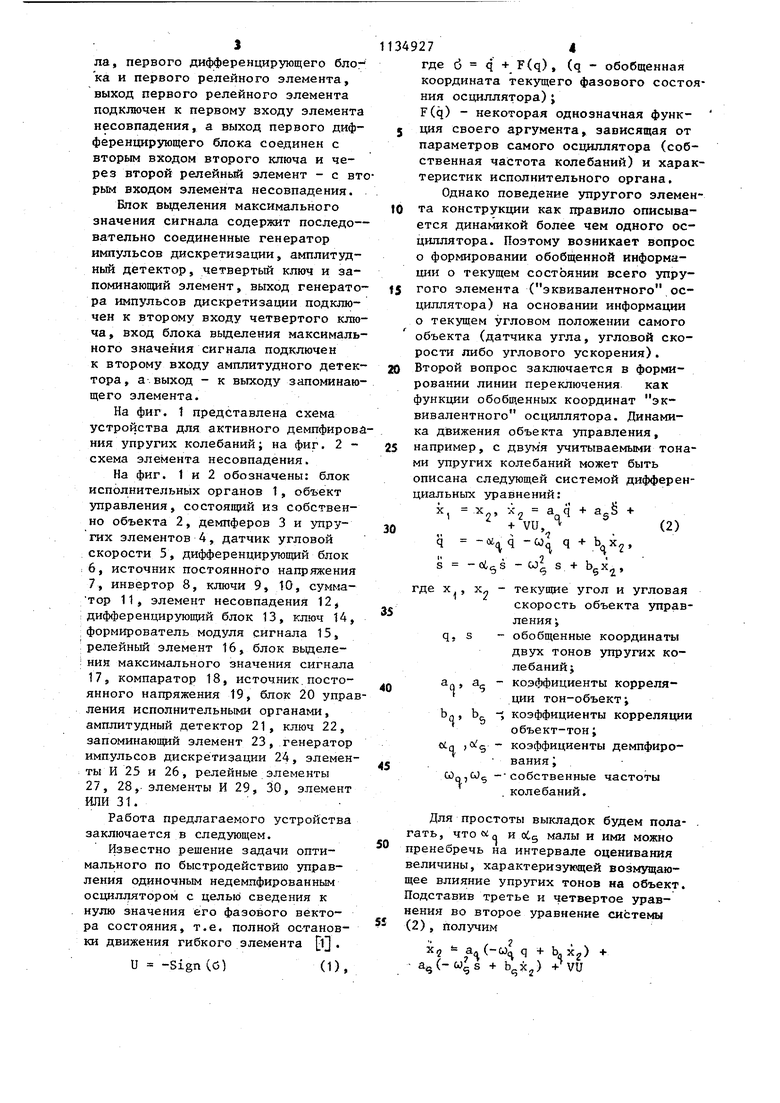
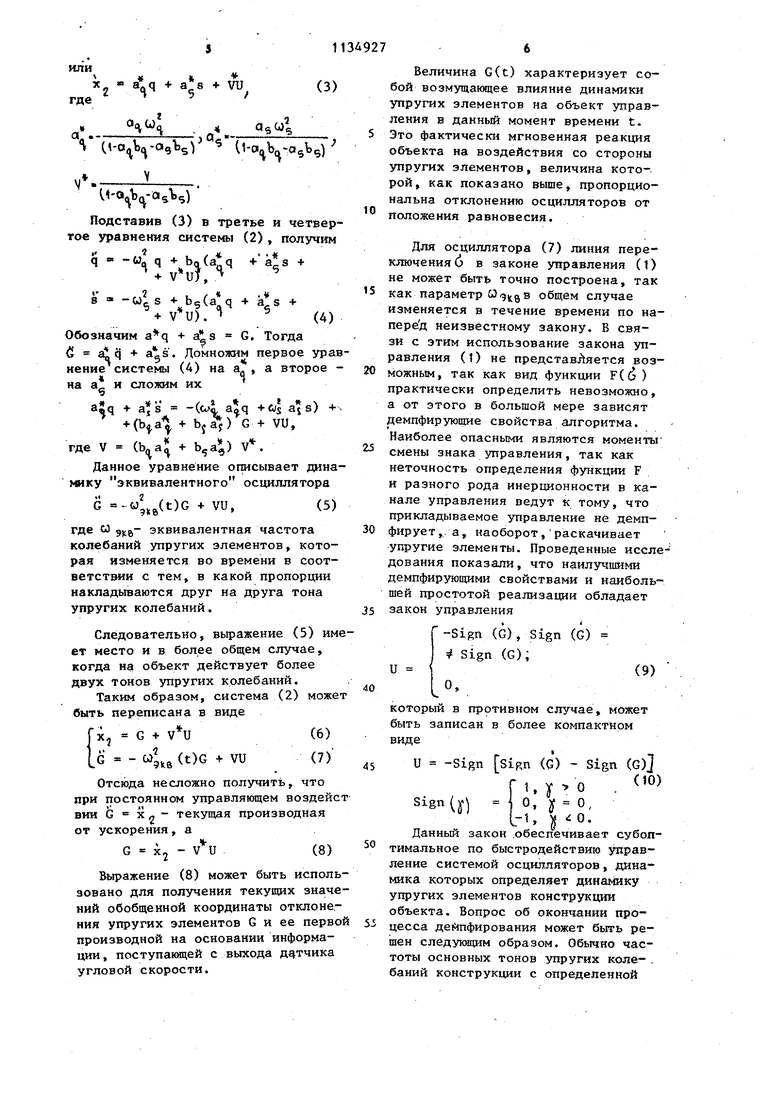
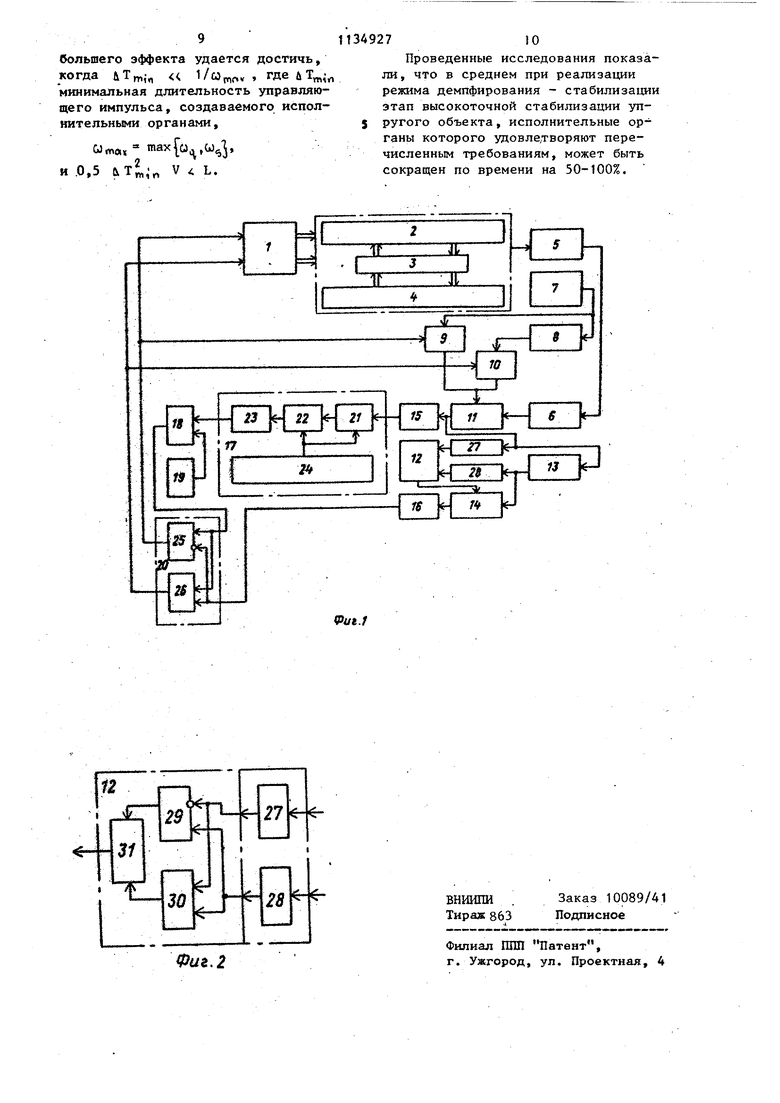
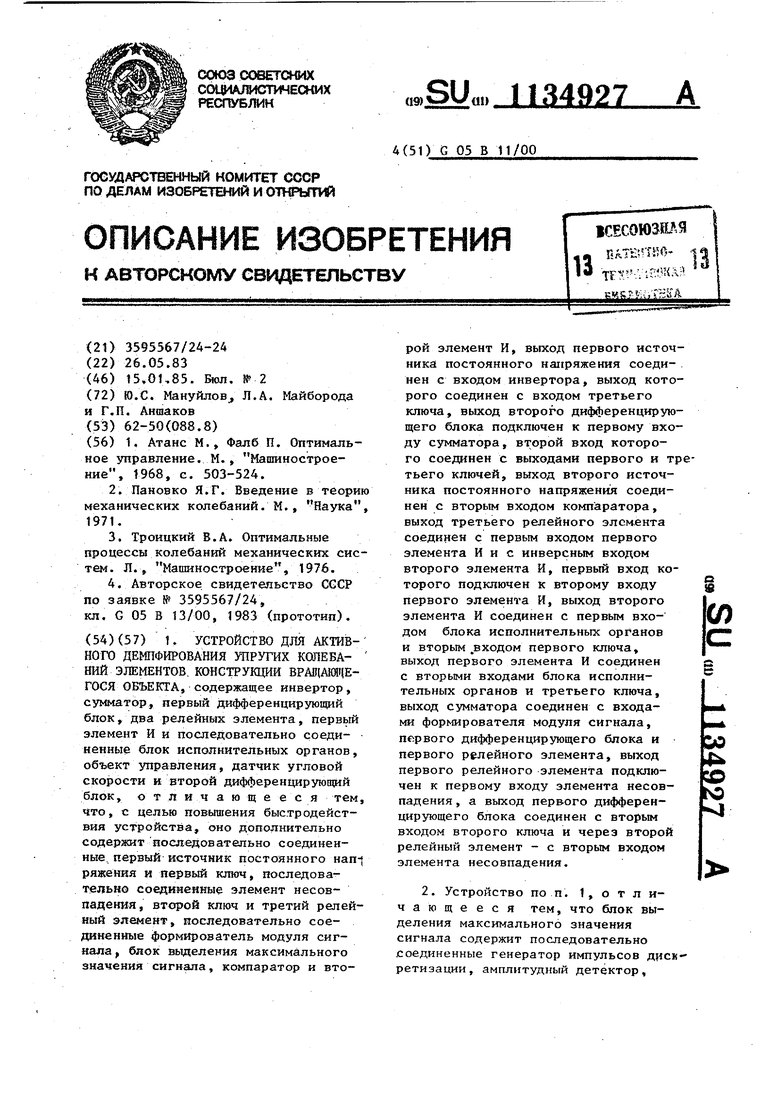
На фиг. t представлена схема устройства для активного демпфировния упругих колебаний; на фиг. 2 схема элемента несовпадения.
На фиг. 1 и 2 обозначены: блок исполнительных органов 1, объект управления, состоящий из собственно объекта 2, демпферов 3 и упругих элементов 4, датчик угловой скорости 5, дифференцирующий блок
;6, источник постоянного напряжения 7, инвертор 8, ключи 9, 10, сумматор 11, элемент несовпадения 12, дифференцирующий блок 13, ключ 14, формирователь модуля сигнала 15, релейньй элемент 16, блок вьщеле ния максимального значения сигнала 17, компаратор 18, источник.постоянного напряжения 19, блок 20 управления исполнительными органами, амплитудный детектор 21, ключ 22, запоминающий элемент 23, генератор импульсов дискретизации 24, элементы И 25 и 26, релейные элементы 27, 28,- элементы И 29, 30, элемент ИЛИ 31.
Работа предлагаемого устройства заключается в следующем.
Известно решение задачи оптимального по быстродействию управления одиночным недемпфированным осциллятором с целью сведения к нулю значения его фазового вектора состояния, т.е. полной остановки движения гибкого элемента } .
и -Sign (б)(1),
1349274
где б q F(q), (q обобщенная координата текущего фазового состояния осциллятора);
F(q) - некоторая однозначная функJ ция своего аргумента, зависящая от параметров самого осциллятора (собственная частота колебаний) и характеристик исполнительного органа.
Однако поведение упругого элемента конструкции как правило описывается динамикой более чем одного осциллятора. Поэтому возникает вопрос о формировании обобщенной информации о текущем состоянии всего упругого элемента (эквивалентного осциллятора) на основании информации о текущем угловом положении самого объекта (датчика угла, угловой скорости либо углового ускорения).
25 Второй вопрос заключается в формировании линии переключения как функции обобщенных координат эквивалентного осциллятора. Динамика движения объекта управления,
25 например, с двумя учитываемыми тонами упругих колебаний может быть описана следующей системой дифференциальных уравнений:
X, X -А а q + а § +
30 - VU, (2)
q -ui( + , s -w| s +
где X , X- - текущие угол и угловая скорость объекта управления
q. S обобщенные координаты двух тонов упругих колебаний;J а,, а- - коэффициенты корреля ции тон-объект; bg, Ъ -у коэффициенты корреляции объект-тон;
otg коэффициенты демпфирования
С0о,(л) -собственные частоты колебаний.
Для простоты выкладок будем полагать, и оСд малы и ими можно пренебречь на интервале оценивания величины, характеризукщей возмущающее влияние упругих тонов на объект. Подставив третье и четвертое уравнения во второе уравнение системы (2), Получим
Xj fe з.Л- q -f b xg)
г а(-со48 + ) 1 2 5 VU (3) . « Ч с -а Ц-а9Ч (1-о.Ц-а5,5) V.. , ) Подставив (3) в третье и четвер тое уравнения систеьв 1 (2) , получим « -WQ q Ьп(а q + as + , 8 -cois b5( + + )Г . „«„ S Обозначим + a s G, Тогда fi a ej -ь . Домножим первое ура нение системы (4) на а, , а второе на а и слоямм их aZq + -( +(1 a s) + + ( + bjay) G + VU, где V ( + ) V. Данное уравнение описывает дина кику эквивалентного осциллятора G (t)G + VU,(5) где СО эквивалентная частота колебаний упругих элементов, которая изменяется во времени в соответстш1и с тем, в какой пропорции накладьшаются друг на друга тона упругих колебаний. Следовательно, выражение (5) им ет место и в более общем случае, когда на объект действует более двух тонов упругих колебаний. Таким образом, система (2) мож быть переписана в виде x,j G + VU G - (t)G + VU Отсюда несложно получить, что при постоянном управляющем воздей вии G X 2 текущая производная от ускорения, а G Xj - VU Выражение (8) может быть испол зовано для получения текущих знач ний обобщенной координаты отклоне ния упругих элементов G и ее перв производной на основании информации , поступающей с выхода датчика угловой скорости. Величина G(t) характеризует собой возмущакйцее влияние динамики упругих элементов на объект управления в данный момент времени t. Это фактически мгновенная реакция объекта на воздействия со стороны упругих элементов, величина которой, как показано выше, пропорциональна отклонению осцилляторов от положения равновесия. Для осциллятора (7) линия переключения б в законе управления (1) не может быть точно построена, так как параметр 63 9)13 в общем случае изменяется в течение времени по наперед неизвестному закону. В связи с этим использование закона управления (1) не представляется возможным, так как вид функции F(6) практически определить невозможно, а от этого в большой мере зависят демпфирующие свойства алгоритма. Наиболее опасными являются моменты смены знака управления, так как неточность определения функции F и разного рода инерционности в канале управления ведут к тому, что прикладываемое управление не демпфирует, а, наоборот,раскачивает упругие элементы. Проведенные исследования показали, что наилучшими демпфируюпдами свойствами и наиболь шей простотой реализации обладает закон управления f -Sign (G), Sign (G) Sign (G); который в противном случае, может быть записан в более компактном виде и -Sign sign (G) - Sign (G) Г1. . « Sign(i,« 0, у 0, L-u 0Данный закон .обеспечивает субоптимальное по быстродействию управление системой осцилляторов, дина- мика которых определяет динамику упругих элементов конструкции объекта. Вопрос об окончании процесса демпфирования Может быть решен следукицим образом. Обычно частоты основных тонов упругих коле-, баний конструкции с определенной точностью известны. Если в качестве некоторого мерного интервала времени fiC выбрать период самого низкочастотного тона (&с Т), то максимальнЬе значение абсолютной величины G на этом интервале С/Сфд / Л о ) характеризует собой уровень упругих колебаний конструк ции. Теперь если задаться некоторым уровнем L упругих колебаний, который считается допустимым, то у ловие окончания процесса демпфирования может быть представлено в ви де /G,T,ax / йо L (11) Предлагаемое устройство работает следующим образом. При необходимости демпфирования колебаний упругих элементов констр ции объекта информация с датчика 5 дифференцируется с помощью блока 6 и затем суммируется с информацией, поступающей с выходов ключей 9 и 1 при отсутствии управляющих сигналов с выходов блока 20 ключи 9 и 1 закрыты и на второй вход сумматора 11 поступает нулевой сигнал. Источ ник постоянного напряжения 7 вьщает сигнал, пропорциональный величи не ускорения и(3), создаваемого исполнительными органами. Поэтому при наличии управляющего сигнала на первом выходе блока 20 (отрицательное управление) в соответствии с выражением (8) ка второй вход сумматора 11 поступает сигнал U , а на выходе сумматора имеем G х -f и . При наличии управляюще го сигнала на втором выходе блока 20 на выходе сумматора 11 G и . Сигнал G дифференцируется с помощью блока 13, а знаки G и G сравниваются в блоке 12, который определяет знаки поступающих на ег входы сигналов с использованием элементов 27, 28 и осуществляет их сравнение на схеме несовпадения собранной из двух элементов И и элемента ИЛИ, на выходе которого разрешающий сигнал в случае sign (G) -sign (с). При этом информация G с выхода блока 13 через ключ 14 поступает на вход элемента 16, который формирует функцию Sign G и подает ее значения на второй вход блока 20 для формирования управления исполнительными органами 1. Но управление к объекту прикладывается только в случае, если /& L. Величина уровня L задается источником 19, а /G /лС формируется на вьпсоде блока 17, который состоит из амплитудного детектора 21, определяющего максимальную амплитуду поступающего сигнала (может быть реализован на операционном усилителе), генератора 24, задающего интервал ЛС и осуществляющего одновременно фиксацию на запоминающем элемент 23 нового значения ,,( /и сброс в ноль детектора 21 (элемент 23 также может быть реализован на базе операционного усилителя). Работоспособность предлагаемого устройства исследуют путем математического моделирования на ЦВМ ЕС-1033 процесса управления сложного динамического объекта с четырьмя осцилляторами, система уравнений, описывающих его динамику, аналогична системе (2) (разница лишь в том, что добавлены два высокочастотных тона с существенно меньшими коэффициентами а, Ь и примерно равными коэффициентами демпфирования Oi по сравнению с первыми двумя, низкочастотными, тонами). Исследования показали работоспособность устройства и высокую эффективность демпфирования низкочастотных колебаний. Высокочастотные колебания при этом не возбуждаются ввиду учета ограничения типа /G j /AJ L при формировании управления. Анадогичный эффект можно достигнуть предва- рительной фильтрацией сигнала G от высокочастотных составляю щих. Для сравнения качества активного демпфирования проводят исследование . использования этого реямма в процессе высокоточной ориентации и стабилизации упругого объекта cOin Dig 0,15. Наиболее высокий уровень упругих колебаний наблюдается после окончания этапа ориентации. После окончания процесса ориентации спользуют режим активного демпфиования. Эффективность подавления пругих колебаний в большой мере ависит от величины параметров bq, , CI}Q , (J ускорения V создааемого исполнительными органами начального ypoBFfH колебаний. Наибольшего эффекта удается достичь, когда « 1/бз„, , где йТ„минимальная длительность управляющего импульса, создаваемого исполнительными органами,
Ц,Ы.5.
Wmoix
max .0,5 ЬТ
V L.
«1 П
113492710
Проведенные исследования показали, что в среднем при реализации режима демпфирования -- стабилизации этап высокоточной стабилизации упругого объекта, исполнительные органы которого удовле,творяют перечисленным требованиям, может быть сокращен по времени на 50-100%.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Атанс М., Фалб П | |||
| Оптимальное зтравление | |||
| М., Маошностроение, 1968, е | |||
| Электрический фонарь - испытательный прибор | 1912 |
|
SU503A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Введение в теорию механических колебаний | |||
| М., Наука, 1971 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Оптимальные процессы колебаний механических систем | |||
| Л., Машиностроение, 1976 | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
