Изобретение относится к области автоматического управления статическими и астатическими, непрерывными и циклическими технологическими объектами в различных отраслях промышленности, в которых возмущения вызывают отклонение объекта от состояния равновесия.
Известны способы автоматического управления [1], по которым формируют задание, измеряют регулируемый параметр, определяют отклонение регулируемого параметра от задания и скорость отклонения, формируют управляющие воздействия пропорционально отклонению регулируемого параметра (П-закон), пропорционально сумме отклонения и интеграла по нем (ПИ-закон), пропорционально сумме отклонения, интеграла и производной по отклонению (ПИД-закон) и отрабатывают непрерывно в течение переходного процесса в соответствии с постоянным изменением отклонения.
Управление технологическими объектами с использованием П-, ПИ- и ПИД-законов регулирования в большинстве своем (случаев) неудовлетворительно из-за наличия статической ошибки при П-законе; увеличения переходного процесса на 20-40% при ПИ- и в 2-3 раза при ПИД-законах по сравнению с П-законом; ограниченности быстродействия (малый допустимый коэффициент усиления в зоне устойчивости); наличия потенциальной возможности генерирования незатухающих колебаний и потери устойчивости; наличия значительных трудностей определения и установки оптимальных параметров настройки.
Известен, выбранный в качестве прототипа, способ автоматического управления [2], по которому формируют задание, измеряют регулируемый параметр, определяют отклонение регулируемого параметра от задания и скорость отклонения, формируют управляющее воздействие пропорционально сумме отклонения и производной (ПД-закон) и отрабатывают непрерывно в течение переходного процесса в соответствии с постоянным изменением отклонения.
Практическое использование данного способа крайне ограничено из-за наличия статической ошибки, потенциальной возможности генерирования незатухающих колебаний и потери устойчивости даже при малом (допустимом) коэффициенте усиления.
Функциональная ограниченность прототипа и аналогов связана с использованием "метода проб и ошибок" и аналоговым принципом формирования и отработки управляющего воздействия, требуемую величину которого не вырабатывают. Управление осуществляют путем непрерывного согласования текущего и заданного значений регулируемого параметра при крайне малых (допустимых) коэффициентах усиления (граница устойчивости). В результате наблюдаются "затягивание" переходного процесса, крайне слабое использование потенциальных возможностей "опережающего воздействия" производной, значительные трудности определения оптимальных значений сильно взаимосвязанных между собой и зависящих от статических и динамических характеристик технологических объектов двух-трех параметров настройки и т.д., а в целом плохое качество управления, невосполнимые потери энергоносителей и промышленной продукции.
Задача изобретения - создание высококачественного способа управления за счет уменьшения динамической ошибки и перерегулирования, продолжительности переходного процесса и интегральных показателей качества и повышение точности управления.
Задача решена тем, что по способу автоматического управления технологическим объектом, по которому фоpмируют задание, измеряют регулируемый параметр, определяют отклонение регулируемого параметра от задания и скорость отклонения, согласно изобретению управляющее воздействие формируют периодически с периодом, равным сумме времени запаздывания и постоянной времени объекта управления, начинают формировать управляющее воздействие в моменты изменения задания и при превышении отклонением зоны ограничения регулируемого параметра и нейтральной зоны, величину которой выбирают меньше величины погрешности регулируемого параметра, величину управляющего воздействия устанавливают пропорциональной предельному отклонению, которое пропорционально скорости отклонения в начале формирования управляющего воздействия и остаточному отклонению в остальные его периоды, дискретно вычитают до нуля из начальной величины управляющего воздействия постоянный сигнал, амплитуда которого больше зоны нечувствительности контура управления.
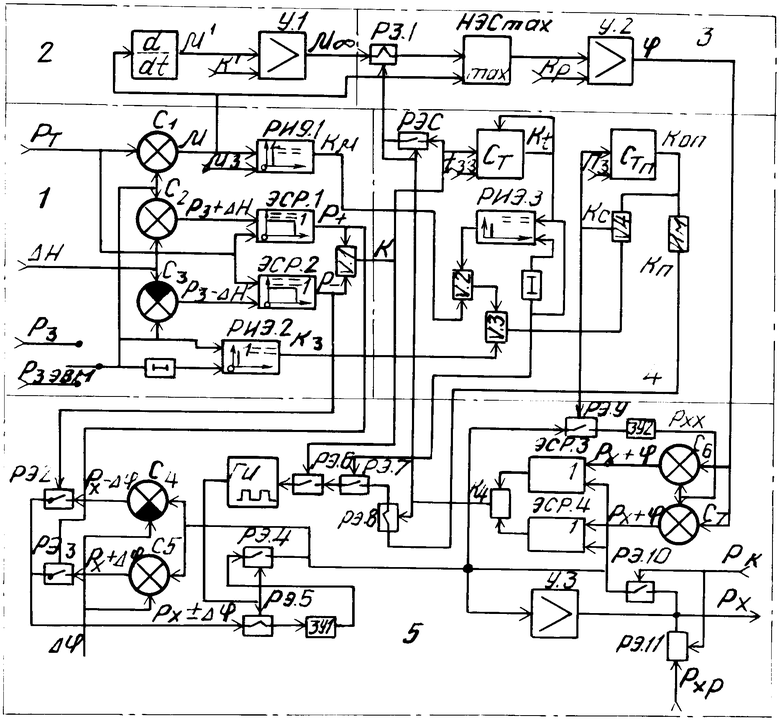
На чертеже изображена схема реализации предлагаемого способа.
Схема реализации предлагаемого способа включает в себя пять блоков. Блок 1 обеспечивает формирование сигналов задания Рз, отклонения μ измеряемого регулируемого параметра Рт от задания Рз, знака отклонения Р±(0,1), команды К(0,1) превышения отклонения заданной нейтральной зоны Δ Н, импульсных команд Kμ (0,1) превышения отклонения μ заданного ограничения μз и Кз(0,1) изменения задания Рз. Блок состоит изх трех сумматоров С1, С2, С3, двухрелейных элементов ЭСР.1,2 сравнения, двух релейно-импульсных элементов РИЭ. 1,2, элемента временной задержки и элемента ИЛИ V.1. На входы С.1 подают сигналы Рт и Рз, а выход μ является выходным сигналом блока, а также входом РИЭ. 1. На второй вход РИЭ.1 подают сигнал задания μз, выход Kμ которого является выходным сигналом блока. На входы С.2 и С.3 подают сигналы Рз и Δ Н, выходы их соединены с первыми входами ЭСР.1 и ЭСР.2, на вторые входы которых подают сигнал Рт, а выходы Р+ и Р- являются выходными сигналами блока и соединены с двумя входами элемента ИЛИ V.1, выход К которого также является выходным сигналом блока. Входы РИЭ.2 один прямо, а другой через элемент временной задержки соединены с Рз, а выход - выходной сигнал Кзблока.
Блок 2 обеспечивает формирование сигналов производной μ' и предельного отклонения μ∞, состоит из дифференциатора и усилителя V.1 с коэффициентом усиления К1. Вход дифференциатора соединен с выходом μ блока 1, а выход - с входом V. 1, на второй вход усилителя подают К', выход которого является выходом μ∞ блока.
Блок 3 обеспечивает формирование нормированного по возмущению управляющего воздействия ϕ, состоит из релейного элемента РЭ.1 с нормально закрытым (НЗ) контактом, непрерывного элемента НЭСmax сравнения с выбором большего сигнала и усилителя V.2 с коэффициентом усиления Кр устройства. Один вход РЭ.1 соединен с выходом μ∞ блока 2, другой - с выходом самоблокирующегося РЭС блока 4, а выход - с первым входом НЭСmax, второй вход которого соединен с выходом μ блока 1, а выход - с входом V.2, выход ϕ которого является выходным сигналом блока.
Блок 4 регламентирует порядок выполнения операций: формирует сигналы временной задержки tз, периода II, команды Кt (0,1) окончания счета времени задержки tз, Коп (0,1) окончания счета периода П, Кссброса в "0" Стп, Кп (0,1) начала счета нового периода П. Блок состоит из двух счетчиков (таймеров) Стtз и Cтп времени, трех элементов ИЛИ V.2,3,4, одного самоблокирующегося релейного элемента задержки и одного инвертора Ин. Вход Стtз соединен с выходом блока 1 (сигнал К) (на второй вход его подают задание времени задержки tз), а выход Кt - с третьим входом его, является выходом блока и соединен с первым входом РИЭ.3 прямо, а с вторым через временной элемент задержки. Выход РИЭ.3 соединен с первым входом элемента ИЛИ V.2, выход которого соединен с первым входом ИЛИ V.3. Вторые входы элементов ИЛИ V.2 и V.3 соединены с выходами блока 1 (Kμ и Кз), причем выход элемента ИЛИ V. 3 соединен с первым входом элемента ИЛИ V.4, второй вход которого соединен с входом Ин и выходом Стп (Коп), а выход - с входом Стп, на второй вход которого подают задание периода Пз. Выходы элемента ИЛИ V.4 и Ин являются выходными сигналами Кс и Кп блока.
Блок 5 обеспечивает формирование с заданной амплитудой, периодом и длительностью приращения выходного сигнала PX±n˙Δϕ заданного знака (±), выработку команды Ки(0,1) окончания отработки сформированного в самом начале периода нормированного управляющего воздействия ϕ, усиление и выдачу на ИМ выходного сигнала Рх устройства. Блок состоит из семи релейных элементов РЭ. 2,3,4,6,7,9,10 с нормально открытыми (НО) контактами, двух РЭ.5,8,11 с НЗ контактами, четырех сумматоров С. 4,5,6,7, двух запоминающих устройств ЗУ. 1,2, генератора прямоугольных импульсов Ги, элемента ИЛИ V.5, двух элементов ЭСР.3,4 сравнения с релейным выходом и усилителя мощности V.3. На первые входы сумматоров С.4,5 подают заданный сигнал приращения Δϕ, а вторые их входы соединены с выходом РЭ.4, входом РЭ.9, второй вход которого соединен с выходом блока 4 (Кс), а также входами ЭСР.3,4 и входом V.3, а выходы С.4,5, через РЭ.2,3, вторые входы которых соединены с выходами блока 1 (Р- и Р+), соединены с входом РЭ.5, выход которого через ЗУ.1 соединен с входом РЭ. 4. Вторые входы РЭ.4 и РЭ.5 соединены с выходом Ги, а вход Ги через РЭ.6, РЭ.7, вторые входы которых соединены с выходами блока 1 (К, Кt) и РЭ.8 соединен с выходом блока 4 (Кп). Второй вход РЭ.8 соединен с выходом элемента ИЛИ V. 5 (Ки) (команда Ки является и выходом блока), два входа элемента ИЛИ V.5 соединен с выходами ЭСР.3 и ЭСР.4 входы которых соединены с входом V.3 и выходами С. 6, 7, первые входы которых через ЗУ.2 соединены с выходом РЭ. 9, а вторые - с выходом блока 3 (ϕ). Выход V.3 соединен с выходом РЭ.11, на вход которого подают сигнал ручного задания Рхр, и входом РЭ. 10, выход которого соединен с входом V.3. На вторые входы РЭ.10 и РЭ.11 подают команду Рк включения автоматического управления.
Способ осуществляют следующим образом.
По статическим и динамическим характеристикам конкретного технологического объекта, характеристикам измерительной и регулирующей аппаратуры схемы реализации предлагаемого способа определяют и устанавливают величины сигналов: регулируемого параметра Рз, нейтральной зоны Δ Н, времени задержки tз, периода П, амплитуду Δϕ, период и длительность дискретных приращений, ограничение μз, коэффициенты усиления К' и Кр. При этом Δ Н выбирают меньше величины погрешности измерения регулируемого параметра tз ≃ 0,1То, П= То+ τ, Δϕ больше зоны нечувствительности контура управления, а период и длительность дискретных приращений больше запаздывания и потерь сигнала в контуре управления, μз≅0,35μ∞, K′=  , а Kр=
, а Kр=  , где То - постоянная времени объекта; τ - запаздывание; μ - производная по отклонению μ; μ∞ - предельное отклонение; Коб - коэффициент усиления объекта. Вначале включают тумблер А (автоматическое регулирование, К - каскадное регулирование). При этом команда Рк закрывает НО и открывает НЗ контакты РЭ.10 и РЭ.11: сигнал ручного управления Рхр с выхода V.3 поступает на вход V.3. Одновременно подаются измеряемый сигнал Рт на входы С.1 и ЭСР.1 и ЭСР.2, а сигнал задания Рз на входы С.1, С.2, С.3 и РИЭ.2 блока 1. При этом на выходе С.1 получают сигнал отклонения μ, на выходах С.2 и С.3 - соответственно Рз+ Δ Н и Рз- Δ Н на выходе РИЭ.2 - импульсный сигнал (Кз=1), который, пройдя через элементы ИЛИ V.2,3,4, сбрасывает в ноль Стп (блок 4). Если технологический объект находится в состоянии равновесия (Рт=Рз, μ=0, μ'=0), то Стп автоматически начинает отсчет периода, но управляющее воздействие не формируется (ϕ= 0) ни вначале этого, ни в последующие периоды. При этом выходной сигнал остается неизменным, т.е. Рх=Рхр.
, где То - постоянная времени объекта; τ - запаздывание; μ - производная по отклонению μ; μ∞ - предельное отклонение; Коб - коэффициент усиления объекта. Вначале включают тумблер А (автоматическое регулирование, К - каскадное регулирование). При этом команда Рк закрывает НО и открывает НЗ контакты РЭ.10 и РЭ.11: сигнал ручного управления Рхр с выхода V.3 поступает на вход V.3. Одновременно подаются измеряемый сигнал Рт на входы С.1 и ЭСР.1 и ЭСР.2, а сигнал задания Рз на входы С.1, С.2, С.3 и РИЭ.2 блока 1. При этом на выходе С.1 получают сигнал отклонения μ, на выходах С.2 и С.3 - соответственно Рз+ Δ Н и Рз- Δ Н на выходе РИЭ.2 - импульсный сигнал (Кз=1), который, пройдя через элементы ИЛИ V.2,3,4, сбрасывает в ноль Стп (блок 4). Если технологический объект находится в состоянии равновесия (Рт=Рз, μ=0, μ'=0), то Стп автоматически начинает отсчет периода, но управляющее воздействие не формируется (ϕ= 0) ни вначале этого, ни в последующие периоды. При этом выходной сигнал остается неизменным, т.е. Рх=Рхр.
Если технологический объект под воздействием возмущения выходит из состояния равновесия, Рт≥Рз+Δ Н (Рт≅Рз-Δ Н), т.е. отклонение регулируемого параметра μ выходит из заданной нейтральной зоны μ≥Δ Н, но μ<μз (заданное ограничение), то на выходе ЭСР.1 блока 1 появляется команда Р -=1, которая замыкает НО контакт РЭ.2 блока 5 (выход ЭСР.2 Р+=0), проходит через элемент ИЛИ V.1 и уже как команда К=1 (выход блока 1) включает Стtз (блок 4), замыкает НО контакт РЭ.6 (блок 5), снимая запрет на включение Ги, и поступает на вход РЭС (блок 4). Одновременно сигнал отклонения μ поступает на вход РИЭ. 1, выход которого Kμ=0, так как μ<μз, вход дифференциатора d/dt и вход НЭС max. При этом выход дифференциатора d/dt усиливается с заданным коэффициентом К' в V.1, и его выходной сигнал, равный предельному отклонению μ∞, пропорционален скорости отклонения (производной) μ', а следовательно, и приложенному возмущению. Сигнал μ∞ через Нзх контакт РЭ.1 поступает на второй вход НЭСmax и сравнивается с μ. Выход НЭСmax, поскольку в начале переходного процесса при большем возмущении μ∞ > μ, равный μ∞, усиливается с заданным Кр в V.2, на выходе которого получают опережающий примерно на ЗТо времени, нормированный по возмущению, т.е. пропорциональный тому отклонению μ∞, которое возникло бы через время, равное ЗТо, сигнал управляющего воздействия ϕ, который поступает на входы С.6 и С.7.
За время отсчета заданного времени задержки (t≃0,1То) отклонение μ, производная μ', предельное отклонение μ∞, а следовательно, и управляющее воздействие ϕ непрерывно увеличиваются. К концу отсчета t33 отклонение μ по абсолютной величине превышает погрешность измерения регулируемого параметра Рт, что увеличивает достоверность измерения μ и μ', а следовательно, и сигнала управляющего воздействия ϕ. В конце отсчета заданного времени задержки, когда tзз≅tт, на выходе Стtзпоявляется команда Кt=1, которая останавливает счет tз, но в ноль Стtзне сбрасывает (сброс в ноль Стtз выполняет команда К=0), замыканием НО контакта РЭ.7 снимает запрет включения Ги, а пройдя через РИЭ.3, уже как импульсная команда Кtи=1 проходит через элементы ИЛИ V.3,4 и уже как импульсная команда Кс=1 сбрасывает в ноль Стп, на время действия импульса замыкает НО контакт РЭ.9 (блок 5), обеспечивая запоминание в ЗУ.2 (блок 5) сигнала выхода в самом конце периода Рх=Рхп.
После сброса в ноль Стп автоматически включается на отсчет следующего периода и его выходной сигнал Коп=0, пройдя через Ин, уже как сигнал Кп=1 проходит через НЗ контакт РЭ.8 и закрытые командами Кt=1 и К=1 НО контакты РЭ. 7 и Р Э.6 и включает Ги, период и длительность прямоугольных импульсов (Р= 0, Р=1) которого заданы. Чередующиеся импульсы Ги управляют НО и НЗ контактами РЭ. 4 и РЭ.5, обеспечивая при Р=0 в С.5 сложение сигнала Рх, равного запомненному в ЗУ.2 в самом конце предыдущего периода, сигнала выхода Рх= Рхп с постоянным заданным сигналом дискретного приращения Δϕ, а в С.4 - вычитание последнего. При этом на ЗУ.1 и вход РЭ.4 через закрытый командой Р-= 1 (блок 1) НО контакт и НЗ контакт РЭ.5 через закрытый командой Р-=1 (блок 1) НО контакт и НЗ контакт РЭ.5 подается сигнал Рх-Δϕ выхода С.4, но на входы сумматоров С.4, С.5 и вход V.3 сигнал Рх- Δϕ не поступает.
При смене импульса с Р=0 на Р=1 после одновременного размыкания НЗ (РЭ. 5) и замыкания НО (РЭ.4) контактов уже уменьшенный на сигнал Рх(Рх-Δϕ) запоминается в ЗУ.1, подается на входы С.4 и С.5 и на вход V.3, а после усиления по мощности - на ИМ, где он перемещением регулирующего органа уменьшает поступление энергии (вещества) на объект на постоянную заданную сигналом приращения величину. Одновременно сигнал Рх-Δϕ подается на входы ЭСР. 3 и ЭСР. 4, в которых сравнивается дискретно изменяющийся сигнал Рх-Δϕ с постоянными на время счета периода П сигналами выхода С.6(Рх+ϕ) и С. 7(Рх-ϕ), которые получают суммированием в С.6, запомненного в ЗУ.2 в самом конце предыдущего периода сигнала Рх=Рхп со сформированным в самом начале данного периода управляющим воздействием ϕ и вычитанием последнего в С.7. При этом выход ЭСР.3 при уменьшении сигнала Рх всегда равен нулю, так как разность сравниваемых сигналов Рх+ ϕ > Рх-n˙Δϕ увеличивается, а выход ЭСР.4 равен нулю только до уменьшения до нуля сравниваемых сигналов (Рх- ϕ < Рх-n˙Δϕ). Сменой импульса с Р=1 на Р=0 обеспечиваются запоминание в ЗУ.1 и выдача на вход РЭ.4 сигнала Рх-2˙Δϕ. При повторной смене импульса с Р=0 на Р= 1 операции повторяются и выходной сигнал Рх и разность между сравниваемыми в ЭСР.4 уменьшается уже на 2˙Δϕ. Процесс дискретного уменьшения выходного сигнала Рх продолжается до полной отработки начальной величины сформированного в самом начале данного периода управляющего воздействия ϕ, т.е. до окончания процесса дискретного вычитания до нуля из начальной величины управляющего воздействия ϕ постоянного заданного сигнала приращения Δϕ. В конце отработки, когда Рх- ϕ≥ Рх-n˙Δϕ, выход ЭСР.4 становится равным единице, а пройдя через элемент ИЛИ V.5, уже как команда Ки=1 размыканием НЗ контакта РЭ.8 выключает Ги и одновременным замыканием НО контакта РЭС (блок 3) обеспечивает самоблокировку его командой К=1 (блок 1), а размыканием НЗ контакта РЭ.1 (блок 3) прекращает подачу сигнала μ∞ на вход НЭСmax на время, пока μ>Δ Н.
Если в начале переходного процесса РтРз, a μ≥Δ Н, но μ<μз, то все операции формирования и отработки нормированного по возмущению управляющего воздействия выполняются аналогично, но выходной сигнал Рхза каждый шаг при смене сигнала выхода Ги с Р=0 на Р=1 увеличивается на также до полной отработки сформированного в самом начале периода сигнала управляющего воздействия ϕ. При этом положительное дискретное приращение Рх+n˙Δϕ обеспечивается ЭСР.2 (блок 1), выход которого при Рт≅Рз- Δ Н Р+=1 замыкает НО контакт РЭ. 3 (блок 5), а выключение Ги обеспечивает ЭСР.4 (блок 5), выход которого при Рх+ ϕ≅ Рх+n˙Δϕ изменяет значение сигнала с нуля на единицу.
После дискретной отработки и выдачи на ИМ объекта управления выходного сигнала Рх±n˙Δϕ до окончания счета периода П никаких других управляющих воздействий не формируется. На технологическом объекте протекает переходный процесс, направленный на компенсацию воспринятой объектом за кратковременное воздействие возмущения "лишней" энергии (вещества). При этом время воздействия возмущения на объект примерно равно 0,1-0,15 То и состоит из времени от начала воздействия возмущения до момента его обнаружения (μ≥Δ Н), заданного времени задержки tз и части времени дискретной отработки управляющего воздействия.
Если в конце периода μ<Δ Н, то команды Р-=Р+=К=0: выполняется сброс в ноль Стtз, Кt=0, НО контакты знака приращения открыты (РЭ.3, РЭ.3 блока 5), НО контакты разрешения включения Ги открыты (РЭ.6, РЭ.7 блока 5), РЭС (блок 4) разблокируется и НЗ контакт РЭ.1 (блок 3) замыкается. В конце периода, когда ПтПз, на выходе Стп появляется команда Коп=1, которая на время действия импульса сбрасывает в ноль команду Кп (выход И и блока 4) и, пройдя через элемент ИЛИ V. 4, уже как команда Кс=0 на время действия импульса закрывает НО контакт РЭ.9 (блок 5), обеспечивая запоминание в ЗУ.2 сигнала выхода Рхк=Рх±n˙Δϕ, и сбрасывает в ноль Стп, который автоматически включается на отсчет следующего периода. При этом Коп=0, Кс=0, а Кп=1, но Ги не выключается. Управляющее воздействие не формируется и не отрабатывается. Выходной сигнал равен Рх-n˙Δϕ, остается постоянным и в последующие периоды, если μ<Δ Н.
Если в конце пеpиода μ>Δ Н, то одна из команд в зависимости от знака отклонения Р- или Р+ остается равной единице, остаются неизменными и команды К=1, Кt=1. При этом остаются закрытыми НО контакты разрешения включения Ги (РЭ.5 и РЭ.6), остается закрытым НО контакт РЭ.2 или РЭ.3 (в зависимости от знака приращения), остается открытым НЗ контакт РЭ.1 (блок 3) и на вход НЭСmax поступает только сигнал остаточного отклонения μ. После усиления в V. 3 получают новый сформированный без временной задержки в самом начале следующего периода сигнал управляющего воздействия, пропорциональный остаточному отклонению, который как и раньше, подается на входы С.6 и С.7 (блок 5). Во время сброса в ноль Стпимпульсная команда Кс=1 обеспечивает запоминание в ЗУ.2 (блок 5) сигнала выхода, который был в самом конце предыдущего Рхк= Рх-n˙Δϕ, а с началом отсчета следующего периода команда с выхода Ин (блок 4) включает в работу Ги. Операции по отработке нового управляющего воздействия, сформированного пропорционально остаточному отклонению, повторяются. Аналогично выполняются операции и в остальные пеpиоды, если μ>Δ Н в самом конце предыдущего периода.
Если в течение пеpиода отклонение превышает заданную зону ограничений, т.е. μ≥μз, то на выходе РИЭ.1 (блок 1) появляется импульсная команда Kμ= 1, которая, пройдя через элементы ИЛИ V. 2,3,4, уже как импульсная команда Кс= 1 обеспечивает запоминание в ЗУ.2 значения выходного сигнала Рх в данный момент времени и сбрасывает в ноль Стп, который с началом отсчета следующего периода формирует на выходе Ин (блок 4) команду Кп=1, которая включает в работу Ги. Операции отработки управляющего воздействия ϕ, сформированного в самом начале периода и пропорционального остаточному отклонению (в данном случае μ≥μз), отрабатываются аналогично.
Если в течение периода изменили задание регулируемого параметра Рх, то на выходе РИЭ.2 (блок 1) появляется импульсная команда Кз=1, которая, пройдя через элементы ИЛИ V.2,3,4, уже как импульсная команда Кс=1 обеспечивает запоминание в ЗУ.2 значения выходного сигнала Рх в данный момент времени, сбрасывает в ноль Стп и т.д., т.е. операции по отработке управляющего воздействия ϕ, сформированного в самом начале данного периода пропорционально остаточному отклонению, отрабатываются аналогично.
Предлагаемый способ управления за счет почти четырехкратного сокращения времени воздействия возмущения и кратковременного возвращения технологического объекта к состоянию равновесия, ограниченного минимальной нейтральной зоной, позволяет примерно двукратно повысить точность, трехкратно сократить время и повысить качество управления объектами с существенно отличающимися динамическими характеристиками, упростить выбор оптимальных параметров настройки, а в целом многократно сократить потери исходных и товарных продуктов, повысить эффективность управления технологическими объектами в различных отраслях промышленности.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПНЕВМАТИЧЕСКИЙ ДИСКРЕТНЫЙ РЕГУЛЯТО ОПТИМАЛЬНОГО РЕЖИМА | 1971 |
|
SU432457A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ОБЪЕКТА | 1991 |
|
RU2042169C1 |
| УСТРОЙСТВО МИКРОПРОГРАММНОГО УПРАВЛЕНИЯ | 1991 |
|
RU2042190C1 |
| УСТРОЙСТВО МИКРОПРОГРАММНОГО УПРАВЛЕНИЯ | 1991 |
|
RU2042188C1 |
| МИКРОПРОГРАММНОЕ УСТРОЙСТВО УПРАВЛЕНИЯ | 1991 |
|
RU2042189C1 |
| ЗАПОМИНАЮЩЕЕ УСТРОЙСТВО | 1991 |
|
RU2037215C1 |
| ПНЕВМАТИЧЕСКИЙ ИНТЕГРАТОР РАСХОДА | 1973 |
|
SU404094A1 |
| Устройство управления схватом манипулятора | 1985 |
|
SU1337250A1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2290592C1 |
| Гидродинамический плотномер жидкостей | 1991 |
|
SU1824534A1 |
Способ относится к области автоматического управления статическими и астатическими, непрерывными и циклическими технологическими объектами в различных отраслях промышленности, в которых возмущения вызывают отклонение объекта от состояния равновесия. Целью изобретения является повышение качества управления, т.е. уменьшение динамической ошибки, перерегулирования, времени переходного процесса и интегральных показателей качества, и повышение точности управления. Цель достигается за счет того, что по способу формируют задание и измеряют регулируемый параметр технологического объекта, определяют отклонение регулируемого параметра от задания и скорость отклонения, а затем формируют периодически с периодом, равным сумме времени запаздывания и постоянной времени объекта, управляющее воздействие. При этом управляющее воздействие начинают формировать в начале каждого периода, в моменты изменения задания и при превышении отклонением зоны ограничения регулируемого параметра и нейтральной зоны, величину которой выбирают меньше погрешности регулируемого параметра. Величину управляющего воздействия устанавливают пропорционально предельному отклонению, которое пропорционально скорости отклонения, при выходе отклонения из нейтральной зоны и пропорционально остаточному отклонению в остальных случаях. Заканчивают формирование управляющего воздействия и отрабатывают его дискретно также в начале периода путем вычитания до нуля из начальной величины управляющего воздействия постоянного сигнала, амплитуда которого больше зоны нечувствительности контура управления. 1 ил.
СПОСОБ УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМ ОБЪЕКТОМ, при котором формируют задание, измеряют регулируемый параметр, определяют отклонение регулируемого параметра от задания и скорость отклонения, отличающийся тем, что, с целью повышения качества управления, управляющее воздействие формируют периодически с периодом, равным сумме времени запаздывания и постоянной времени объекта управления, начинают формировать управляющее воздействие в моменты изменения задания и при превышении отклонением зоны ограничения регулируемого параметра и нейтральной зоны, величину которой выбирают меньше величины погрешности регулируемого параметра, величину управляющего воздействия устанавливают пропорционально предельному отклонению, которое пропорционально скорости отклонения, в начале формирования управляющего воздействия и пропорционально остаточному отклонению в остальные его периоды, дискретно вычитают до нуля из начальной величины управляющего воздействия постоянный сигнал, амплитуда которого больше зоны нечувствительности контура управления.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Там же, с.368. | |||
