условий обслуживания. Устройство содержит корпус 1, размещенньй в нем воспринимающий элемент в виде магни- тоуправляемого геркона 2, закрепленный на подвижной направляющей А, постоянный магнит 3 и передаточный узел. Передаточньй узел выполнен в виде упругого элемента 6. Один конец его соприкасается с подвижным узяом 7 гидродомкрата передвижки. Другой конец упругого элемента 6 размещен в подвижной направляющей 4, а сред- няя часть расположена в пазу пальца 8. Последний соединяет корпус 1 с основанием 10. В исходном положении
- Изобретение относится к горному
машиностроению и может быть использовано в тех случаях, где требуется дистанционный контроль и индикация крайних положений одного или несколь ких гидроцилиндров, домкратов передвижки, в системах дистанционного или автоматизированного управления секциями гидрофицированной крепи.
Целью изобретения является улуч- шение условий обслуживания.,
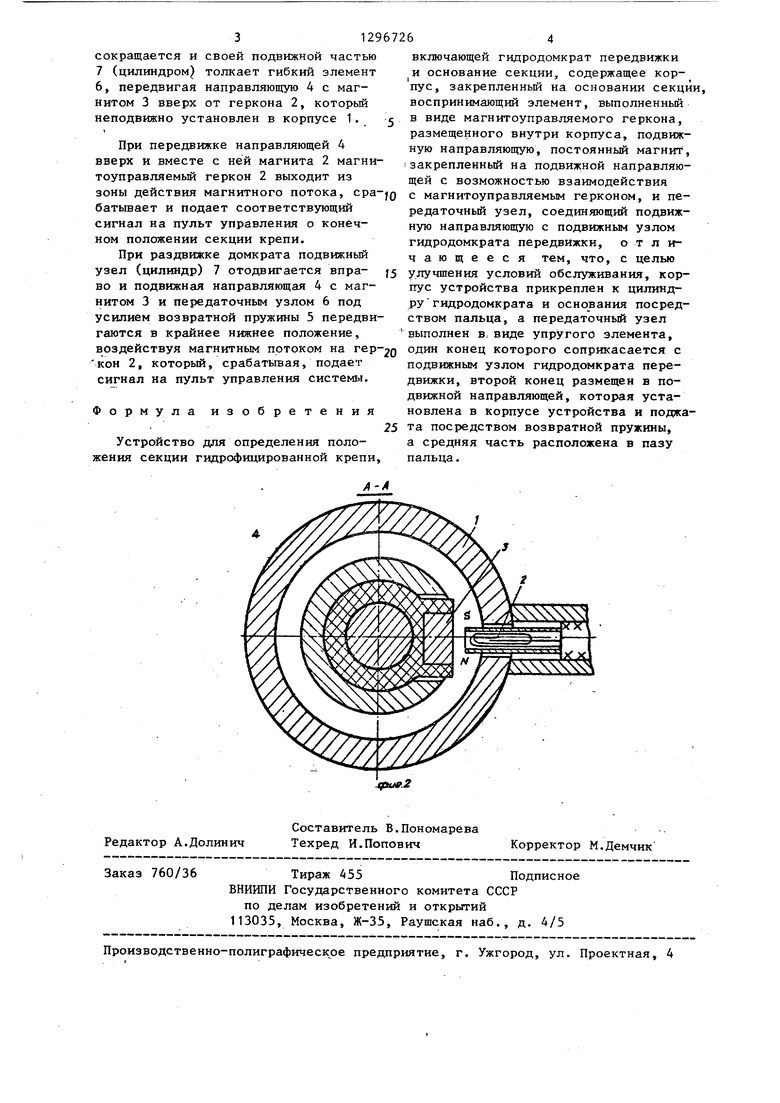
На фиг. 1 представлена конструктивная схема предлагаемого положения секции крепи, на фиг. 2 - разрез А-А на фиг. 1. ,
Устройство для определения положения секции крепи содержит корпус восnpifflИМЕЮЩИЙ элемент, выполненный в виде кагнитоуправляемого геркона 2, размещенного внутри корпуса 1. Магнитоуправляемый геркон 2 соединен электрическим кабелем с пультом управления (не показан). Устройство содержит постоянньй магнит 3, закрепленный на подвижной направляющей 4, изготовленной из немагнитного материала,в i Подвижная направляющая 4 установлена внутри корпуса 1 и поджата к его торцу возвратной пружиной 5.
Устройство содержит также передаточный узел, выполненный в виде отрезка упругого элемента 6, один конец которого соприкасается (контактирует) с подвижным узлом 7 гидро-
подвижный узел 7 гидродомкрата выдвинут относительно основания 10 секции и подвижная.направляющая 4 с магнитом 3 и упругий элемент 6 под действием пружины 5 находятся в крайнем нижнем положении. При передвижении секции крепи гидродомкрат сокра- щается и толкает упругий элемент 6, передвигая направляющую 4 с магнитом вверх от магнитоуправляемого геркона 2. Последний при передвижке направляющей 4 и магнита 3 выходит из зоны действия магнитного потока и подает сигнал на пульт управления о конечном положении секции. 2 ил.
О
5
5
0
5
домкрата передвижки, второй конец размещен в -ифдвижной направляющей 4. Средняя часть передаточного узла 6 расположена в пазу пальца 8, жестко прикрепленного к неподвижному узлу 9 гидр домкрата, перпендикулярно его оси. Палец 8 установлен также в основании 10 секции крепи. К основанию 10 секции крепи прикреплен корпус 1 устройства с подвижной направляющей 4 и,.магнитоуправляемым гер- коном 2. ,,,, м,
Передаточный узел может быть выполнен в виде отрезка стального каната, обладающего малой поперечной и высокой продольной жидкостью.
Подвижный узел 7 гидродомкрата передвижки может быть либо гидроци- Л1ШДРОМ, как показано н фиг. 1, либо порщнем со щтокьм.
Соответственно неподвижным узлом гидродомкрата передвижки может быть либо шток 9 с порщнем (фиг. 1), либо гидроцилиндр.
Предлагаемое устройство для определения положения секции крепи работает следующим образом.
В исходном положении подвижный узел (цилиндр) домкрата вьщвинут относительно основания секции 10, подвижная направляющая 4 с магнитом 3 и ynpyriM элементом 6 под действием усилия воз вратной пружины 5 находится в крайнее. нижнем положении. При передвижке секции крепи гидродомкрат
31296726
сокращается и своей подвижной частью 7 (цилиндром толкает гибкий элемент 6, передвигая направляющую 4 с магнитом 3 вверх от геркона 2, которьй неподвижно установлен в корпусе 1.
При передвижке направляющей 4 вверх и вместе с ней магнита 2 магни- тоуправляемый геркон 2 выходит из
зоны действия магнитного потока, cpa-jQ с магнитоуправляемым герконом, и пебатывает и подает соответствующий сигнал на пульт управления о конечном положении секции крепи.
При раздвижке домкрата подвижный узел (цилиндр) 7 отодвигается вправо и подвижная направляющая 4 с магнитом 3 и передаточным узлом 6 под усилием возвратной пружины 5 передвигаются в крайнее нижнее положение,
редаточный узел, соединяющий подвижную направляющую с подвижньм узлом гидродомкрата передвижки, отличающееся тем, что, с целью J5 улучшения условий обслуживания, корпус устройства прикреплен к цилиндру гидродомкрата и основания посредством пальца, а передаточньй узел выполнен в, виде упругого элемента.
воздействуя магнитным потоком на rep-2Q один конец которого соприкасается с
кон 2, который, срабатывая, подает сигнал на пульт управления системы.
Формула изобретения
Устройство для определения положения секции гидрофицированной крепи.
подвижным узлом гидродомкрата передвижки, второй конец размещен в подвижной направляющей, которая установлена в корпусе устройства и поджа 25 та посредством возвратной пружины, а средняя часть расположена в пазу пальца.
включающей гидродомкрат передвижки и основание секции, содержащее корпус, закрепленньм на основании секции, воспринимающий элемент, выполненный в виде магнитоуправляемого геркона, размещенного внутри корпуса, подвижную направляющую, постоянный магнит, закрепленный на подвижной направляющей с возможностью взаимодействия
редаточный узел, соединяющий подвижную направляющую с подвижньм узлом гидродомкрата передвижки, отличающееся тем, что, с целью улучшения условий обслуживания, корпус устройства прикреплен к цилиндру гидродомкрата и основания посредством пальца, а передаточньй узел выполнен в, виде упругого элемента.
подвижным узлом гидродомкрата передвижки, второй конец размещен в подвижной направляющей, которая установлена в корпусе устройства и поджа- та посредством возвратной пружины, а средняя часть расположена в пазу пальца.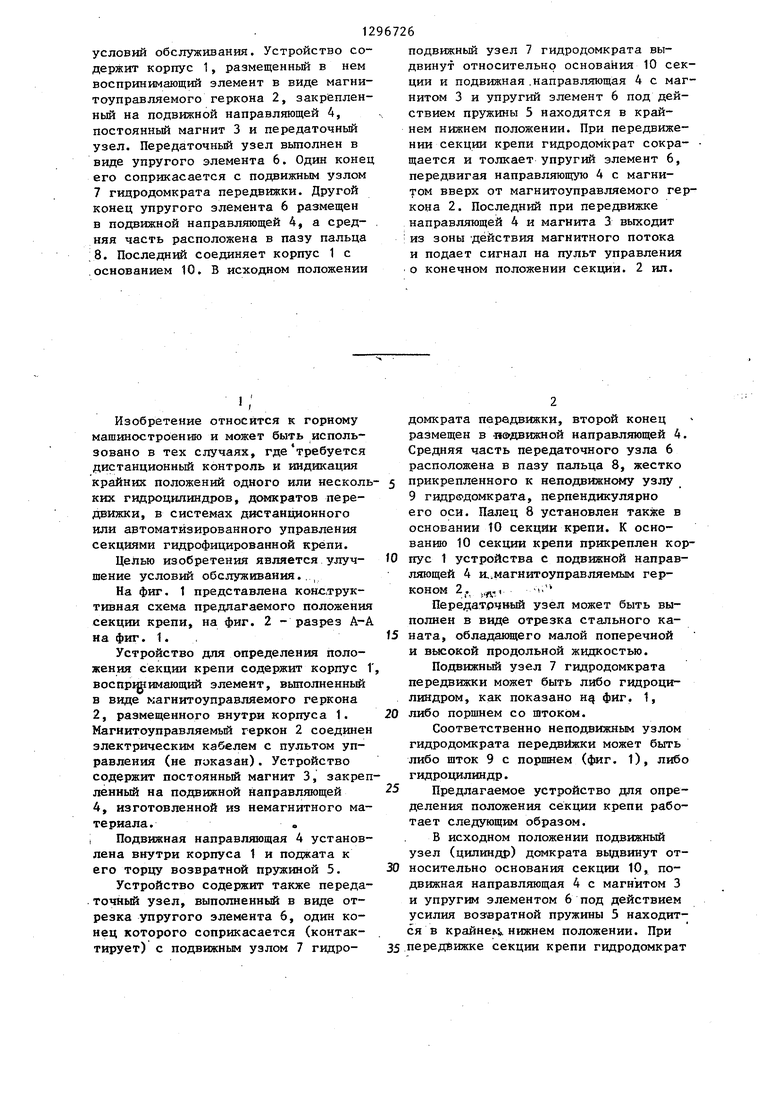
Изобретение относится к горному машиностроению и используется в системах дистанционного или автоматизированного управления .секциям гидро- фицированной крепи и в случаях, где требуется дистанционный контроль и индикация крайних положений одного или нескольких гидроцилиндров и домкратов передвижки. Цель - улучшение (Л N5 СО 05 -J to О)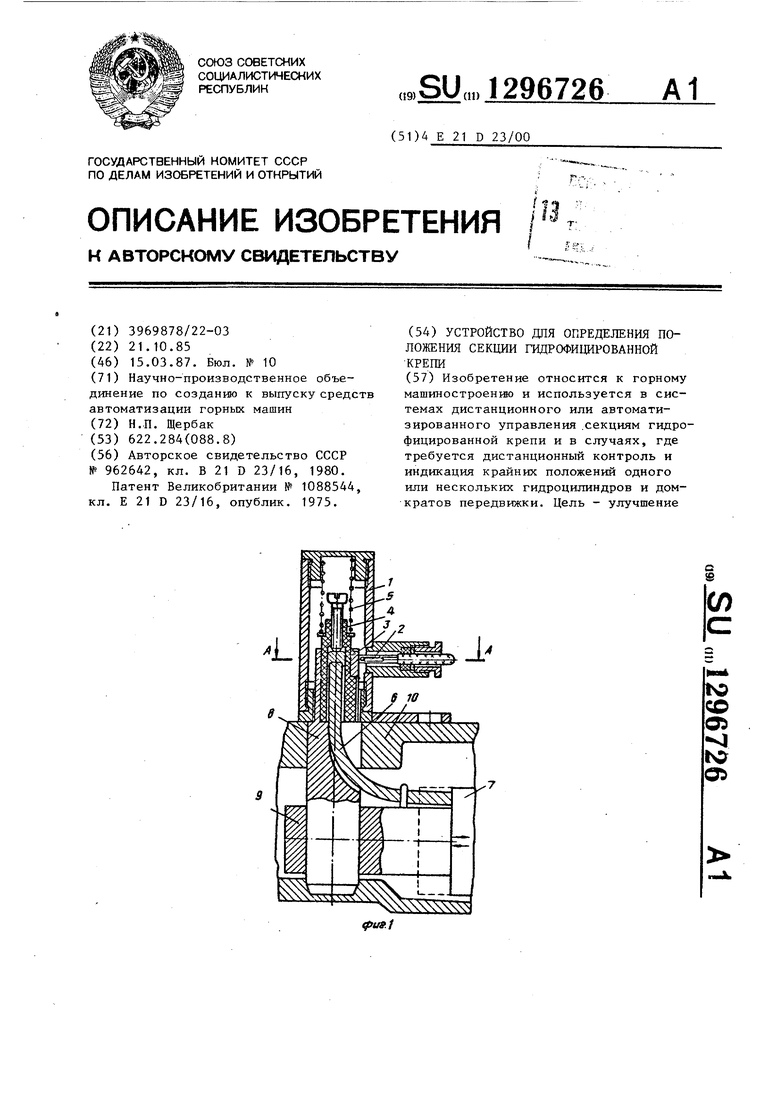
Редактор А.Долинич
Составитель В.Пономарева Техред И.Попович
Заказ 760/36
Тираж 455Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор М.Демчик
| Устройство для контроля положения поршня гидроцилиндра | 1981 |
|
SU962642A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Патент Великобритании № 1088544, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Сплав для отливки колец для сальниковых набивок | 1922 |
|
SU1975A1 |
