1
Изобретение относится к области автоматизации струговых агрегатов и комплексов, а именно, к средствам поддержания прямолинейности базы агрегата в плоскости пласта.
Известно устройство автоматического поддержания прямолинейности очистного агрегата, принцип действия которого основан на измерении степени выдвижения и втягивания штоков гидродомкратов передвижки базы. Устройство включает потенциометр, смонтированный в трубке из немагнитного .материала, входящей в пустотелый шток поршня. В трубке на стержне установлен реостат с ползунком. Пемерещение втулки с ползунком осушествляется кольцевым магнитом (смонтированным в поршне). Электрические цепи потенциометра подключены к источнику питания и датчику на пульте управления, фиксирующему положение поршня в соответствии с положением ползуна 1.
Однако этому устройству свойственно накапливание ошибки перемещения, .как в результате наличия люфтов в узлах Системы передвижки, так и в результате проскальзывания крепи относительно кровли (почвы) пласта в момент перемещения базы.
Наиболее близким техническим решением из известных является устройство для управления перемещением базы механизированной крепи, включающее активные и пассивные секции крепи, связанные с секциями базы гидродомкратами передвижения, и задающий механизм, содержащий вспомогательные гидроцилиндры с выдвижными задающими элементами и управляющие элементы гидродомкратов передвижения активных секций крепи 2.
Недостатком этого устройства является -возможность накопления ошибок в передвижении базы и потеря ее прямолинейности.
Целью изобретения является повыщение точности поддержания прямолинейности базы.
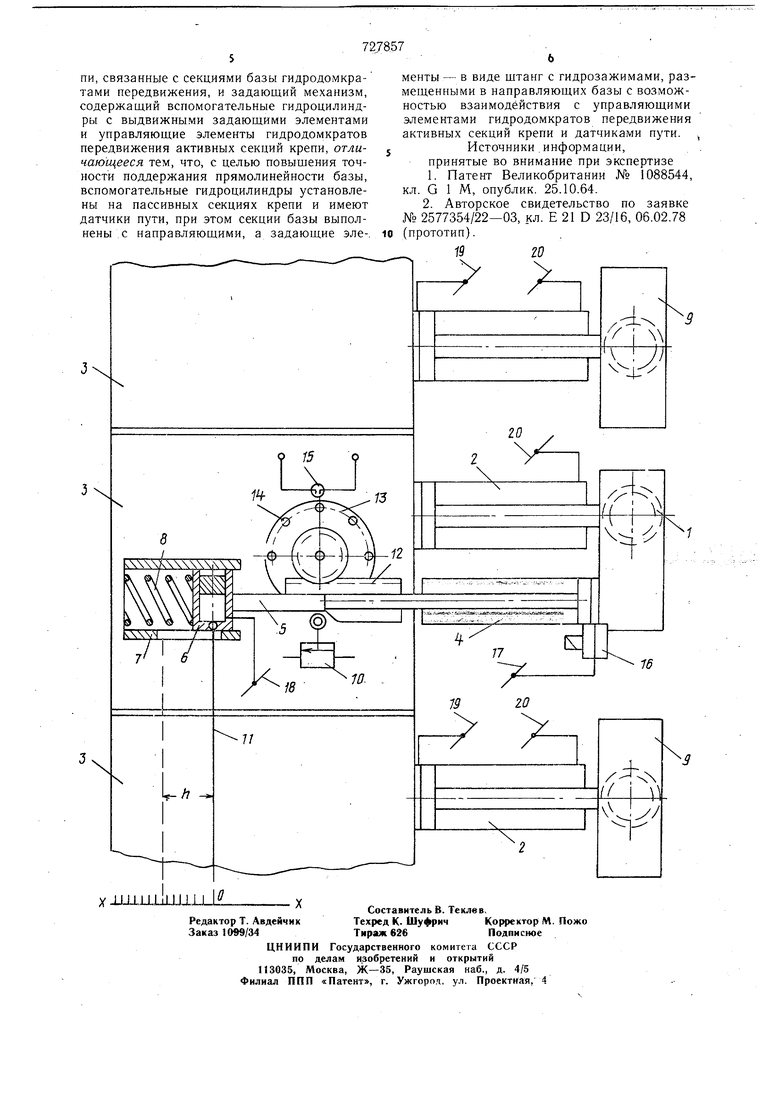
Поставленная цель достигается тем, что вспомогательные гидроцилиндры установлены на пассивных секциях крепи и имеют датчики пути, при этом секции базы выполнены с направляющими, а задающие элементы- в виде щтанги с гидрозажимами, размещенными в направляющих базы с возможностью взаимодействия с управляющими элементами гидродомкратов передвижения активных секций крепи и датчиками пути. На чертеже изображена принципиальная схема устройства для управления перемещением базы механизированной крепи. На пассивной секции 1 с отключенной от гидромагистрали поршневой полостью домкрата 2 передвижки базы 3 установлен вспомогательный гидроцилиндр 4, на выдвижной части которого закреплена задающая штанга 5, соединенная с секцией, базы посредством: гидрозажима 6 размещенного в направляющих 7 с пружиной 8. Штанга расположена с возможностью взаимодействия с установленным на базе управляющим элементом активных секций крепи 9, выполненным либо в виде гидроклапана 10, либо в виде электрогидроклапанов с датчиками (на схеме не показана), на которые воздействует натянутая вдоль базы и закрепленная на штанге гибкая нить 11. Соотношение количества активных и пассивных секций крепи выбирается в зависимости от конструктивных особенностей конкретного типа агрегата. Штанга также соединена посредством зубчатой реечной передачи 12 с установленным на базе датчиком пути (перемещения штанги), представляющим собой диск 13 с постоянными магнитами 14, перемещающимися относительно неподвижного магнитоуправляемого контакта (геркона) 15. Давление рабочей жидкости подводится к вспомогательному гидроцилиндру через электрогидроклапан 16 по гидромагистрали 17; к гидрозажиму - по гидромагистрали 18, к поршневым полостям гидродомкратов - по гид-ромагистрали 19 и к щтоковым полостям гидродомкратов - по гидромагистрали 20. Устройство работает следующим образом В исходном состоянии секции крепи 1 и 9 гидродомкратами 2 подтянуть к базе 3. Задающая штанга 5 находится в нулевом положении условной проекции ее на ось Х-Х неподвижной системы координат плоскости угольного пласта. С пульта управления оператор задает программу требуемой толщины стружки h на данном цикле передвижки базы. При этом открывается электрогидроклапан 16 и в гидроцилиндр 4 начинает поступать рабочая жидкость, благодаря чему штанга. 5 перемещается относительно неподвижной базы 3, вращая при номощи реечной передачи 12 диск 13 и магниты 14, воздействуя на геркон 15 и выдают в линию элерстрические импульсы. В момент когда количество импульсов датчика пути перемещения штанги достигнет заданной программы, оператор по показаниям счетчика (или же автоматическое ycT ройство) отключит электрогидроклапан 16 и задающая щтанга будет зафиксирована в положении h, при котором откроется гидроклапан 10 (от штанги или через соответствующие датчики и электропривод от нити 11). После этого оператор включает давление рабочей жидкости, которая поступает через гидроклапан 10 по гидромагистрали 19 в поршневые полости гидродомкратов 2 активных секций крепи 9 и база 3 передвигается на забой, выполняя заданный ей ход на величину стружки h, после чего останавливается. Реверсивный счетчик импульсов на пульте оператора отмечает выполненный базой ход. Как известно, база в силу различных причин может не точно выполнить заданный ей ход. Однако, благодаря жестко привязке задающей штанги к отметке h по оси Х-Х плоскости пласта, на следующем цикле передвижки эта ощибка будет скомпенсирована. Привязка задающей штанги, к пласту в данном устройстве осуществляется поджаТием ее пружиной 8 к запертому объему жидкости в гидроцилиндре 4, закрепленному на неподвижной пассивной секции крепи 1, проскальзывание которой в момент передвижки базы исключено, так как поршневая полость ее гидродомкрата 2 отключена от гидромагистрали. Отсчет пути .перемещения штанги ведется по базе путем контроля ее фактического перемещения, пропорционального заданному количеству импульсов, начиная каждый с нуля. После нескольких циклов передвижек базы, когда будет полностью выбран ход гидродомкратов 2, по гидромагистрали 20 подается давление рабочей жидкости в штоковые полости гидродомкратов активных 9 и пассивных 1 секций крепи, а также давление в гидрозажим 6 по гидромагистрали 18 и задающая штанга 5 жестко фиксируется относительно неподвижной базы 3, пока идёт подтягивание секций крепи. Независимо от того, в каком положении штока гидроцилиндра 4 произойдет распор пас-сивной секции 1, новый цикл передвижки штанги 5 начинается из положения, в котором она находилась на отметке по оси Х-Х предыдущего цикла. Необходимая точность контроля устройства определяется количеством электрических импульсов датчика, приходящихся на единицу длины пути перемещения штанги и зависит от расположения и,количества магнитов 14 на диске 13. Такое выполнение устройств исключает накопление ошибок ходов гидродомкратов, поддерживает прямолинейность базы агрегата, что в конечном итоге повышает производительность и надежность работы очистного агрегата. Формула изобретения Устройство для управления перемещением базы механизированной крепи, включаюгцее активные и пассивные секции кре

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления перемещением базы механизированной крепи | 1980 |
|
SU877058A1 |
| Устройство для управления перемещением базы механизированной крепи | 1979 |
|
SU877057A1 |
| Устройство автоматического поддержания заданной толщины стружки очистного агрегата | 1979 |
|
SU881343A1 |
| Способ управления перемещением базы механизированной крепи | 1980 |
|
SU877059A1 |
| Устройство для управления перемещением базы механизированной крепи | 1985 |
|
SU1305374A2 |
| Устройство для управления перемещением базы механизированной крепи | 1977 |
|
SU726347A1 |
| Способ автоматического контроля и регулирования прямолинейности траектории движения горнодобывающего комплекса и устройство для его осуществления | 1985 |
|
SU1325168A1 |
| Система управления передвижением базы механизированной крепи | 1980 |
|
SU909204A1 |
| Устройство для шагового перемещения базы механизированной крепи | 1979 |
|
SU861640A1 |
| Устройство для управления перемещением базовой балки очистного агрегата периодического действия | 1980 |
|
SU1117401A1 |
