СП
со
4 4::
Изобретение относится к электротехнике,. в частности к электроприводу с плавным регулированием частоты вращения, и преимущественно может найти применение в следящих системах, содержащих вентильные электродвигатели.
Известен регулируемый электропривод, содержащий двухфазный синхронный электродвигатель и датчик положения ротора в виде вращающегося трансформатора, имеющие соответственно синусные и косинусные якорные обмотки, тахогенератор, выполненный в виде коллекторного генератора постоянного тока, первый и второй фазочувствительные выпрямители, первый и второй усилители и источник входного сигнала, выходом подсоединенный к первичной обмотке вращающегося трансформатора, синусная и косинусная обмотки которого соответственно через первый и второй чувствительные выпрямители, первый и второй усилители связаны с синусной и косинусной якорными обмотками двухфазного синлронного электродвигателя, ротор которого механически связан с роторами датчика положения ротора и коллекторного генератора постоянного тока, выход которого подключен к регулирующему входу источника входного сигнала 1.
Недостатками данного устройства являются низкая надежность и малый срок службы, обусловленные наличием коллекторнощеточного узла коллекторного генератора постоянного тока.
Наиболее близким к изобретению по технической сущности и решаемой задаче является бесконтактный регулируемый электропривод, содержащий двухфазный синхронный электродвигатель, тахогенератор, выполненный в виде двухфазного синхронного генератора, и датчик положения ротора в виде вращающегося трансформатора, имеющие соответственно синусные и косинусные якорные обмотки, первый и второй фазочувствнтельные выпрямители, первый и второй суммирующие усилители и источник входного сигнала, выходом подсоединенный к первичной обмотке вращающегося трансформатора, синусная и косинусная обмотки которого соответственно через первый и второй фазочувствительные выпрямители, первый и второй суммирующие усилители связаны с синусной и косинусной якорными обмотками двухфазного синхронного электродвигателя, ротор которого механически связан с роторами датчика положения ротора и двухфазного синхронного генератора, причем устройство содержит также третий и четвертый фазочувствительные выпрямители, первый, второй и третий модуляторы, входы третьего и четвертого фазочувствительных выпрямителей соединены соответственно с синусной и косинусной обмотками вращающегося трансформатора, а их выходы - с первым и вторым входами первого модулятора,, первый и второй выходы которого подключены к управляющим входам соответственно первого и второго фазочувствительных выпрямителей, а синусная и косинусная обмотки двухфазного синхронного генератора соответственно через второй и третий модуляторы соединены с управляющими входамитретьего и четвертого фазочувствительных выпрямителей 2.
Недостатком известного устройства является его сложность и, как следствие, низкая надежность.
Целью изобретения является повыщение надежности при одновременном упрощении 5 устройства.
Поставленная цель достигается тем, что в бесконтактный регулируемый электропривод, содержащий двухфазный синхронный электродвигатель, тахогенератор, выполненный в виде двухфазного синхронного генератора, и датчик положения ротора в виде
вращающегося трансформатора, имеющие соответственно синусные и косинусные якорные обмотки, первый и второй фазочувствительные выпрямители, первый и второй сум5 мирующие усилители и источник входного сигнала, выходом подсоединенный к первичной обмотке вращающегося трансформатора, синусная и косинусная обмотки которого соответственно через первый и второй фазочувствительные выпрямители, первый
0 и второй суммирующие усилители связаны с синусной и косинусной якорными обмотками двухфазного синхронного электродвигателя, ротор которого механически связан с роторами датчика положения ротора и двухфазного синхронного генератора, введены
5 первое и второе апериодические звенья, входы которых соответственно подсоединены к синусной и косинусной якорным обмоткам двухфазного синхронного генератора, а выходы - к входам первого и второго сумми0 рующих усилителей.
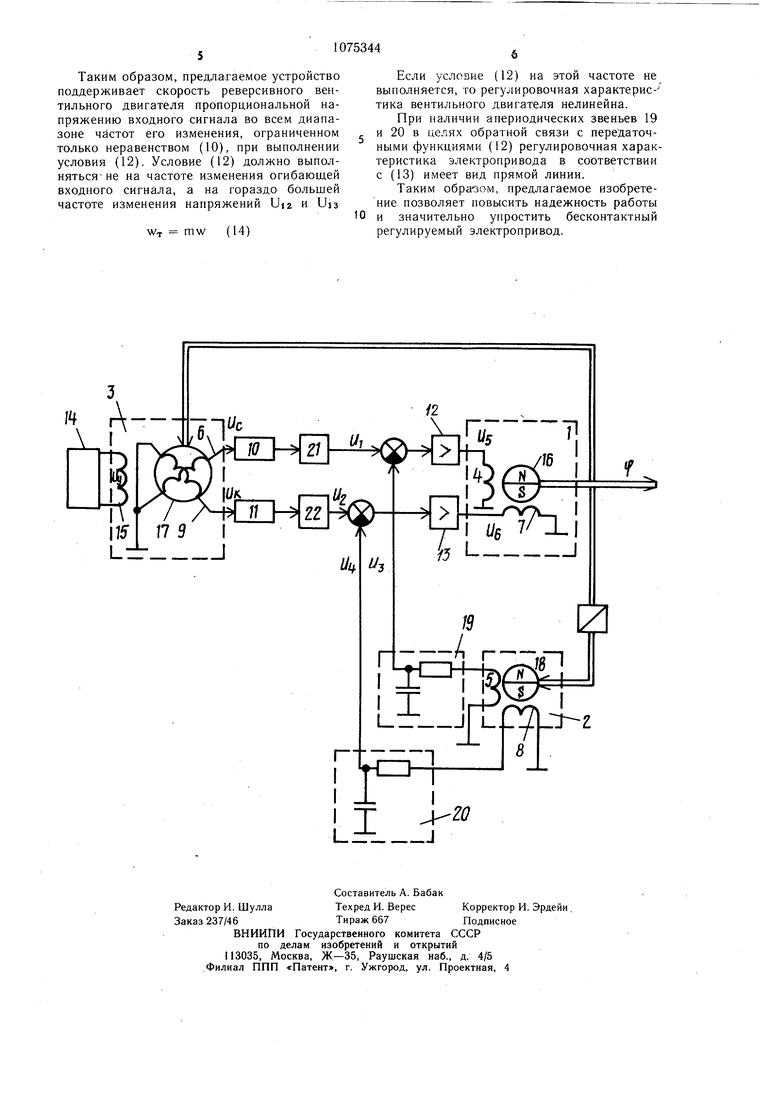
На чертеже представлена функциональная схема бесконтактного регулируемого электропривода.
Бесконтактный регулируемый электропривод содержит двухфазный синхронный
5 электродвигатель 1, тахогенератор 2, выполненный в виде двухфазного синхронного генератора, и датчик 3 положения ротора в виде вращающегося трансформатора, имеющие соответственно синусные 4-6 икосинусные 7-9 якорные обмотки, первый 10 и второй 11 фазочувствительные выпрямители, первый 12 и второй 13 суммирующие усилители и источник 14 входного сигнала, выхрдом подсоединенный к первичной обмотке 15 вращающегося трансформатора 3. Си5 нусная 6 и косинусная 9 обмотки последнего соответственно через первый 10 и второй 11 фазочувствительные выпрямители, первый 12 и второй 13 суммирующие усилители связаны с синусной 4 и косинусной 7 якорными обмотками двухфазного синхронного электродвигателя, ротор 16 которого механически связан с ротором 17 датчика 3 положения ротора и ротором 18 двухфазного синхронного генератора 2. В устройство введены первое 19 и второе 20 апериодические звенья, входы которых соответственно подсоединены к синусной 5 и косинусной. 8 якорным обмоткам двухфазного синхронного генератора 2, а выходы - к входам первого 12 и второго 13 суммирующих усилителей. Кроме того, в устройство могут быть включены фильтры 21 и 22, включенные перед входами суммирующих усилителей. Бесконтактный регулируемый электропривод работает следующим образом. При подаче напряжения Uy переменного тока от источника 14 входного сигнала на синусной 6 и косинусной 9 обмотках вращающегося трансформатора 3 образуются напряжения переменного тока, огибающие которых равны Ug К а Uy siTTm Ц,(i) U9 Ka yCOSTnf, где Ка коэффициент трансформации вращающего трансформатора 3; У-угол поворота ротора 16 электродвигателя I; т-число пар полюсов электродвигателя и вращающегося трансформатора. Пройдя через первый 10 и второй 11 фазочувствительные выпрямители и фильтры 21 и 22, эти напряжения преобразуются в напряжения U21 и U22 Uii-Wn(P)KdUysiTiTnf, (p)K3Uycos tny, а) где Wn(p) - передаточная функция последовательно соединенных первого 10 (второго 11) фазочувствительного выпрямителя и фильтра 21 (22). На суммирующих входах первого 12 и второго 13 суммирующих усилителей из этих напряжений вычитаются напряжения обратной связи Ui9 и U20, сформированные двухфазным синхронным генератором 2 и первым 19 и вторым 20 апериодическими звеньямии„ - Woc(p) sifl , (3) го Woe (РЖт U/T cos где Woc(p)-передаточная функция апериодических звеньев; К -коэффициент передачи двухфазного синхронного генератора 2; fyy(U/T-угол и угловая частота вращения ротора 18 синхронного генератора 2 соответственно; тп -число его пар полюсов. На выходах первого 12 и второго 13 суммирующих усилителей образуются сигналы и,г Ку(игГи„)-,и«Ку(игг-игоХ() где К у-коэффициент усиления суммирующих усилителей. Для нормальной работы предлагаемого устройства выбирают передаточное отнощение i механической связи между роторами электродвигателя 1 и двухфазного синхронного генератора 2 m,i .1Т1 (5) При равенстве числа пар полюсов электродвигателя 1 и двухфазного синхронного генератора . При выполнении (5) Чт if и WT iw, где W - угловая частота вращения ротора 16 электродвигателя 1, с учетом (4) получаем Uit tTsin ТПЧ; Ui3 (Гсоз тЧ., (б) где 5 Ку11А/о1рЖдиу-Шос(Р) В соответствии с принципом действия электродвигателя 1 эти напряжения образуют в его расточке статора вращающееся магнитное поле, которое создает вращающий момент двигателя, приводящий ротор 16 во вращение со скоростью, пропорциональной амплитуде напряжений Ujj и Uia. Следовательно, W K80 r KffDKy U/n(P) KaUy- A/octP)K,iWl, где Квскоэффициент, определяемый конструктивными параметрами электродвигателя 1. Разрешая последнее уравнение относительно W, получаем . KM KyKaWn(P) l KepKyKTiWoc(p) В полосе рабочих частот выбираем коэффициент усиления достаточно большим, чтобы выполнялось неравенство iKeoKyKriWoclP) Тогда из (9) находим ц,-К Wn(P) ,, Wof(P) f где Для нормальной работы предлагаемого устройства, необходимо также выполнение условия Woc(p) WntP),(1г) с учетом которого (11) принимает вид w KUy-аз)
Таким образом, предлагаемое устройство поддерживает скорость реверсивного вентильного двигателя пропорциональной напряжению входного сигнала во всем диапазоне частот его изменения, ограниченном только неравенством (10), при выполнении условия (12). Условие (12) должно выполняться-не на частоте изменения огибающей входного сигнала, а на гораздо большей частоте изменения напряжений Ui2 и Ujs
(14)
WT mw
Если условие (12) на этой частоте не выполняется, то регулировочная характеристика вентильного двигателя нелинейна.
При наличии апериодических звеньев 19 и 20 в целях обратной связи с передаточными функциями (12) регулировочная характеристика электропривода в соответствии с (13) имеет вид прямой линии.
Таким образом, предлагаемое изобретение позволяет повысить надежность работы и значительно упростить бесконтактный регулируемый электропривод.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электропривод | 1988 |
|
SU1633477A1 |
| Бесконтактный регулируемый электропривод | 1990 |
|
SU1830598A1 |
| Следящий электропривод | 1991 |
|
SU1833828A1 |
| Реверсивный вентильный электродвигатель | 1985 |
|
SU1297186A1 |
| Бесконтактный регулируемый электропривод | 1986 |
|
SU1361697A1 |
| Вентильный электропривод | 1987 |
|
SU1480084A1 |
| Вентильный электропривод | 1987 |
|
SU1635243A1 |
| Вентильный электродвигатель | 1986 |
|
SU1418880A1 |
| Реверсивный вентильный электродвигатель | 1983 |
|
SU1153381A1 |
| Следящий вентильный электропривод | 1982 |
|
SU1241400A1 |
БЕСКОНТАКТНЫЙ РЕГУЛИРУЕМЫЙ ЭЛ ЕКТРОПРИВОД, содержащий двухфазный синхронный электродвигатель, тахогенератор, выполненный в виде двухфазного синхронного генератора, и датчик положения ротора в виде вращающегося трансформатора, имеющие соответственно синусные и косинусные якорные обмотки, первый и второй фазочувствительные выпрямители, первый и второй суммирующие усилители и источник входного сигнала, выходом подсоединенный к первичной обмотке вращающегося трансформатора, синусная и косинусная обмотки которого соответственно через первый и второй фазочувствительные выпрямители, первый и второй суммирующие усилители связаны с синусной и косинусной, якорными обмотками двухфазного синхронного электродвигателя, ротор которого механически связан с роторами датчика положения ротора и двухфазного синхронного генератора, отличающийся тем, что, с целью повышения надежности при одновременном упрощении, введены первое и второе апериодические звенья, входы которых соответственно подсоединены к синусной и косинусной якорным обмоткам двухфазного синхронного генератора, а выходы - к входам пер(Л вого и второго суммирующих усилителей.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Азов А | |||
| К | |||
| и др | |||
| Электронные устройства следящих систем | |||
| Л., «Судостроение, 1978 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| БЕСКОНТАКТНЫЙ РЕВЕРСИРУЕМБШ РЕГУЛИРУЕМЫЙПРИВОД | 0 |
|
SU253226A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
