Изобретение относится к приборостроению и может использоваться при создании бескарданных гироскопов на сферической шарикоподшипниковой опоре, которые могут применяться, например, в качестве чувствительных элементов гиростабилизаторов или двухканальных измерителей угловой скорости.
Известен гироскоп [1], содержащий корпус, гиромотор, карданов подвес, датчики угла и датчики момента, повернутые относительно друг друга на 90° вокруг продольной оси гироскопа.
Основным недостатком данного гироскопа является наличие карданова подвеса, что обуславливает значительный дрейф гироскопа из-за необходимости применения токоподводов для подачи электропитания на обмотки гиромотора, датчиков угла и датчиков момента и шарикоподшипников - для обеспечения вращения рамок карданова подвеса.
Наиболее близким по технической сущности к заявленному устройству является гироскоп [2], содержащий корпус с герметично закрывающейся крышкой, гиромотор, ротор на сферической шарикоподшипниковой опоре, датчики угла индуктивного типа и электромагнитные датчики момента. Статор гиродвигателя состоит из двух шихтованных пакетов, разделенных между собой немагнитным элементом, и обмотки, витки которой охватывают оба пакета. Обмотка гиродвигателя кроме основной своей функции выполняет функцию первичной обмотки индуктивного датчика угла. Вторичные обмотки датчиков угла намотаны раздельно на каждом пакете, причем каждая пара обмоток геометрически сдвинута относительно друг друга на 90°, что позволяет производить измерения по двум осям. Датчики момента конструктивно выполнены аналогично с датчиками угла и геометрически сдвинуты относительно них на 180°.
Недостатком данного гироскопа является сложная, трудоемкая в изготовлении конструкция статора гиромотора, не позволяющая создание малогабаритных гироскопов.
Задачей, на решение которой направлено изобретение, является создание малогабаритного гироскопа на сферической шарикоподшипниковой опоре за счет упрощения конструкции и снижения трудоемкости изготовления статора гиромотора.
Поставленная задача для гироскопа, содержащего корпус с расположенным внутри него гиромотором, включающим статор с катушками и ротор на сферической шарикоподшипниковой опоре, трансформаторно-индуктивные датчики угла и электромагнитные датчики момента, решается за счет того, что в роторе гиромотора выполнена кольцевая полость, в которой расположены катушки статора гиромотора: катушка возбуждения и катушка положения, смещенные относительно друг друга на 90° и жестко закрепленные на корпусе гироскопа, а на роторе находятся кольцевой магнитопровод и кольцевой двухполюсный постоянный магнит гиромотора, расположенные напротив рабочих частей катушек статора.
К существенным отличиям предложенного гироскопа по сравнению с известным является выполнение в роторе гиромотора кольцевой полости для расположения катушек возбуждения и положения статора гиромотора и размещение на роторе кольцевого двухполюсного постоянного магнита гиромотора, что позволило уменьшить габариты гироскопа и снизить трудоемкость его изготовления, сохранив при этом точностные параметры устройства-прототипа.
Изобретение поясняется чертежами.
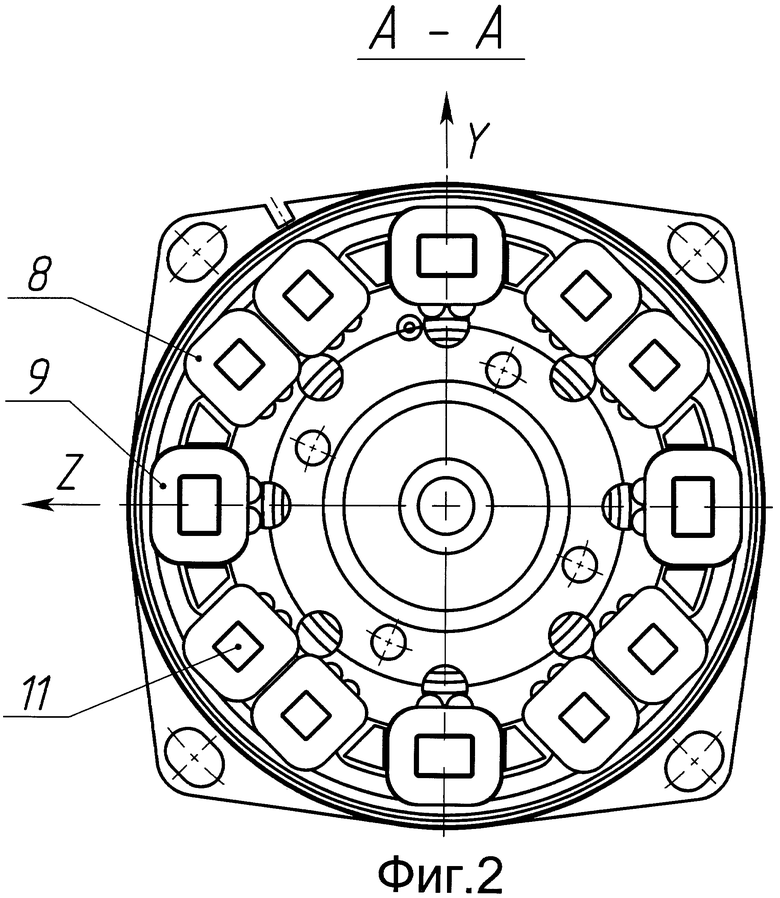
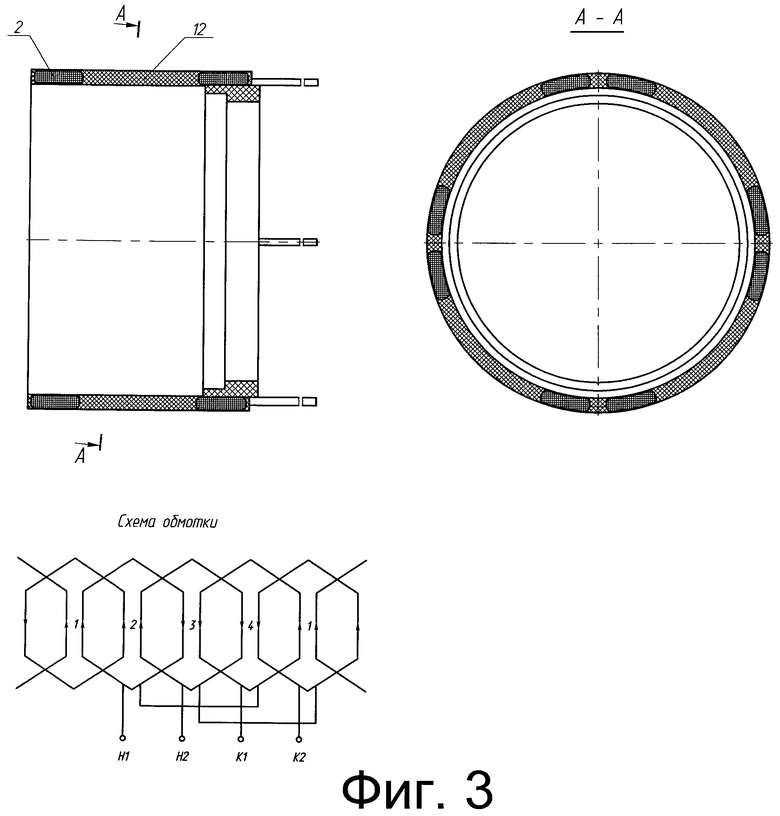
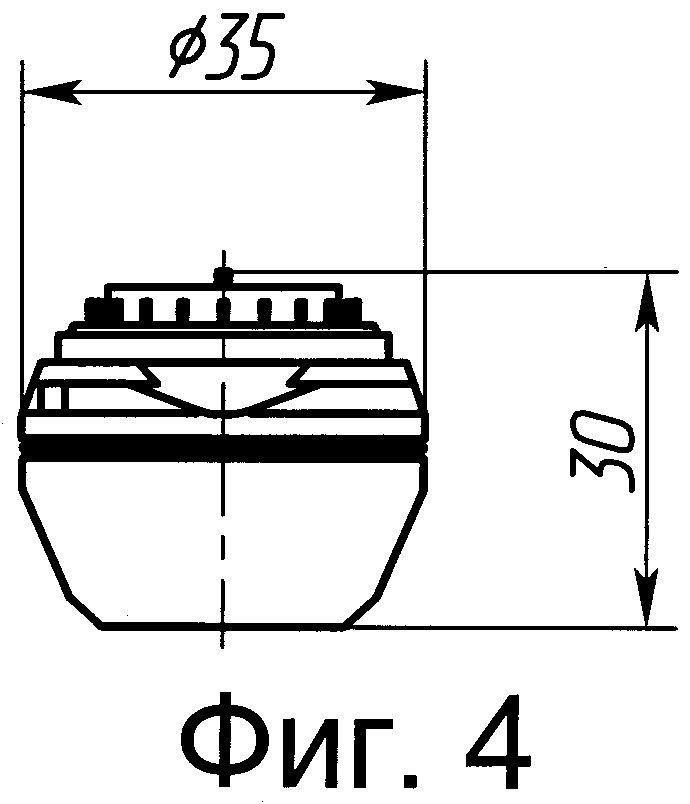
На фиг 1 представлен вид предложенного гироскопа сбоку в разрезе; на фиг.2 - вид в сечении по линии А-А фиг.1; на фиг.3 представлен статор в разрезе со схемой обмотки; на фиг.4 - габаритный чертеж одного из вариантов гироскопа.
Гироскоп содержит корпус 1, гиромотор, включающий статор 2 с катушками и ротор 3 на сферической шарикоподшипникой опоре 4, датчики 8 угла и датчики 9 момента. В роторе 3 гироскопа выполнена кольцевая полость, в которой находится кольцевой магнитопровод 6 и кольцевой двухполюсный постоянный магнит 7. Неподвижные катушки статора 2 жестко закреплены на корпусе гироскопа и расположены в кольцевой полости ротора 3 таким образом, что рабочие части намотки катушек 12 размещены напротив кольцевого магнитопровода 6 и кольцевого двухполюсного постоянного магнита 7 ротора 3. Работа гиромотора основана на принципе действия двухфазного бесколлекторного двигателя постоянного тока [3]. Создание вращающего момента ротора основано на правиле Флеминга. На проводник с током, расположенный в магнитном поле, действует сила. Направление силы определяется правилом левой руки, а ее значение равно

где z - количество проводников,
В - магнитная индукция в воздушном зазоре;
I - электрический ток;
l - эффективная длина проводника.
Для регистрации угла поворота ротора 3 гиромотора используются датчики 8 угла, неподвижная (статорная) часть которых выполнена, например, в виде П-образного сердечника, на который надеты две одинаковые катушки 11, одна из этих катушек является обмоткой возбуждения, а вторая - сигнальной обмоткой. Датчик 8 угла по каждому каналу содержит два таких сердечника с катушками 11, расположенных диаметрально и смещенных относительно осей чувствительности гироскопа на угол 45°. Сигнальные обмотки датчиков 8 угла включены последовательно встречно так, что наводимые в них ЭДС вычитаются. Для создания управляющих моментов используются электромагнитные датчики 9 момента, работающие на постоянном токе. На средний стержень каждого сердечника, имеющего, например, Ш-образную форму, надета катушка управления. Ротором, общим для датчиков 8 угла и датчиков 9 момента, является, например, ферритовое кольцо 10, располагаемое на роторе 3 гиромотора.
Гироскоп выполнен герметичным и заполнен гелиеводородной смесью до давления, например, 750 мм рт.ст. в целях снижения аэродинамического момента сопротивления и его влияния на дрейф гироскопа (через проекции этого момента на оси чувствительности гироскопа). Для съема и подачи электрических сигналов служат гермовводы 13.
Гироскоп работает следующим образом. В нулевом положении в силу симметрии выходной сигнал с датчиков 8 угла отсутствует. В режиме измерения при наличии угловой скорости, например, относительно оси Y корпус 1 гироскопа начнет разворачиваться относительно этой оси, а ротор 3 будет стремиться сохранить неизменным в инерциальном пространстве направление вектора кинетического момента. Зазоры между ферритовым кольцом 10 и торцевыми поверхностями сердечников датчиков 8 угла изменятся и на выходе датчика 8 угла появится сигнал, амплитуда которого пропорциональна измеряемому углу, а фаза определяет знак углового перемещения. Данный сигнал электрически обрабатывается и подается в катушки датчика 9 момента по оси Z, при этом ротор 3 по правилу гироскопии будет прецессировать (поворачиваться) относительно оси Y, стремясь уменьшить до нуля рассогласование на датчике 8 угла. Мерой угловой скорости является ток в катушках датчика 9 момента. Зависимость квадратичная

где w - измеряемая угловая скорость;
к - масштабный коэффициент датчика момента;
I - ток в катушке датчика момента.
При использовании гироскопа в качестве чувствительного элемента гиростабилизатора сигнал с датчика 8 угла электрически обрабатывается и подается, например, на двигатель разгрузки гиростабилизатора. Датчик 9 момента гироскопа при этом используется либо для компенсации дрейфа гироплатформы, либо для управления, при необходимости разворота гироплатформы.
Предложенная конструкция гироскопа отличается простотой, высокой технологичностью и низкой трудоемкостью по сравнению с аналогичными устройствами, сохраняя при этом точностные параметры гироскопа. Преимущества обусловлены следующими основными особенностями:
1) отсутствие кардановых рамок;
2) использование двухфазного бесколлекторного электродвигателя постоянного тока;
3) использование единой сферической шарикоподшипниковой опоры, сочетающей функции подшипников ротора гиромотора и подшипников рамок и реализующей принцип уменьшения трения Жуковского, согласно которому момент трения направлен противоположно вектору относительной угловой скорости вращения колец шарикоподшипника и в данном случае практически не проектируется на оси чувствительности гироскопа.
Источники информации
1. АС СССР №431808 Трехстепенный гироскоп // МПК G01C 19/00, заявлено 26.11.1971 г.
2. Патент США №3517562, НКИ 74/5.6, МПК G01C 19/28, выдан 30.06.1970 г. (прототип).
3. Информационный материал «AVR440: Управление двухфазным бесколлекторным электродвигателем постоянного тока без датчиков» с.1-10.
Сайт в Интернете: www.gaw.ru, б/г.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИРОСКОП (ВАРИАНТЫ) | 2005 |
|
RU2308680C2 |
| ГИРОСКОП (ВАРИАНТЫ) | 2011 |
|
RU2460040C1 |
| ГИРОСКОП | 2019 |
|
RU2728733C1 |
| СПОСОБ КОРРЕКЦИИ ДРЕЙФА ГИРОСКОПА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2572501C1 |
| ГИРОСКОП | 2021 |
|
RU2771918C2 |
| Двухканальный датчик угловой скорости | 2019 |
|
RU2725880C1 |
| Устройство для управления двигателем и коррекции дрейфа гироскопа | 2021 |
|
RU2789116C1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП | 1999 |
|
RU2173446C2 |
| ДАТЧИК УГЛОВОЙ СКОРОСТИ НА БАЗЕ МОДУЛЯЦИОННОГО ГИРОСКОПА | 2004 |
|
RU2276773C2 |
| ГИРОСТАБИЛИЗАТОР ОПТИЧЕСКИХ ЭЛЕМЕНТОВ | 2016 |
|
RU2625643C1 |
Изобретение относится к приборостроению и может использоваться при создании бескарданных гироскопов на сферической шарикоподшипниковой опоре, которые могут применяться, например, в качестве чувствительных элементов гиростабилизаторов или двухканальных измерителей угловой скорости. Гироскоп содержит корпус 1, гиромотор, включающий статор 2 с катушками и ротор 3 на сферической шарикоподшипниковой опоре 4, датчики угла и датчики момента. В роторе 3 гироскопа выполнена кольцевая полость, в которой находится кольцевой магнитопровод 6 и кольцевой двухполюсный постоянный магнит 7. Неподвижные катушки статора 2 жестко закреплены на корпусе гироскопа и расположены в кольцевой полости ротора таким образом, что рабочие части намотки катушек размещены напротив кольцевого магнитопровода 6 и кольцевого двухполюсного постоянного магнита 7 ротора 3. Работа гиромотора основана на принципе действия двухфазного бесколлекторного двигателя постоянного тока. Изобретение позволяет значительно уменьшить габариты и трудоемкость изготовления, при сохранении точностных параметров бескарданных гироскопов на сферической шарикоподшипниковой опоре. 4 ил.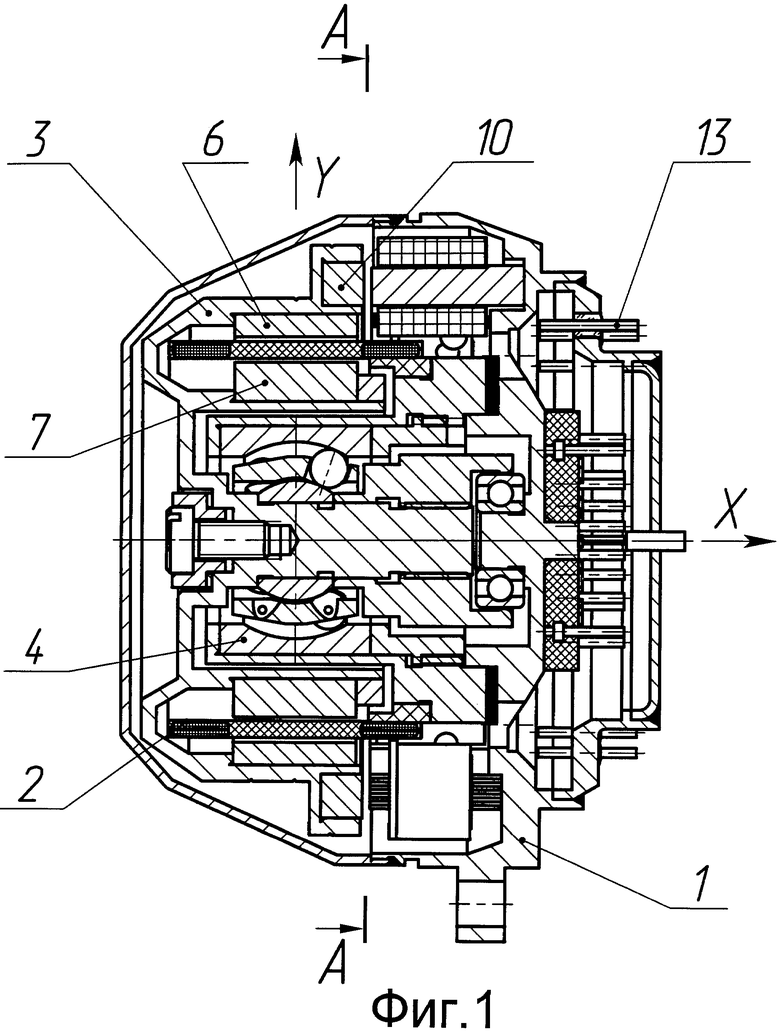
Гироскоп, содержащий корпус с расположенным внутри него гиромотором, включающим статор с катушками и ротор на сферической шарикоподшипниковой опоре, трансформаторно-индуктивные датчики угла и электромагнитные датчики момента, отличающийся тем, что в роторе гиромотора выполнена кольцевая полость, в которой расположены катушки статора гиромотора, катушка возбуждения и катушка положения, смещенные друг относительно друга на 90° и жестко закрепленные на корпусе гироскопа, а на роторе находятся кольцевой магнитопровод и кольцевой двухполюсный постоянный магнит гиромотора, расположенные напротив рабочих частей катушек статора.
| ГИРОСКОП (ВАРИАНТЫ) | 2005 |
|
RU2308680C2 |
| US 3517562 А, 30.06.1970 | |||
| ТРЕХСТЕПЕННЫЙ ГИРОСКОП | 1971 |
|
SU431808A1 |
| ГИРОСКОП | 2002 |
|
RU2210735C1 |
| ГИРОСКОП | 2002 |
|
RU2215261C2 |
| Капельная масленка с постоянным уровнем масла | 0 |
|
SU80A1 |

