Изобретение относится к технике регулирования угловой скорости и является усовершенствованием изобретения по авт. св. № 708317.
Цель изобретения - повышение точности датчика.
На чертеже изображен гидромеханический датчик угловой скорости.
Датчик содержит корпус 1 и ротор 2, внутри которого размешен клапан, выполненный в виде центробежного груза 3, опи- ю раюш,егося на седло 4. Источник гидравлической энергии соединен с внутренним объемом корпуса через канал 5, дроссель 6 и отверстие 7. Внутренний объем корпуса соетупая через дроссель 6, отверстие 7, седло 4, полость 9 и отверстие 10 в канал 8 слива, преодолевает соп)отивленке, .создаваемое клапаном протоку жидкости. При этом давление перед клапаном соответствует угловой скорости вращения ротора.
Центробежная сила, действующая на груз 3 с хвостовиком 12, равна Fuo - Fus, где Рцб - центробежная сила груза 3; Рцб - центробежная сила хвостовика 12.
Т.е. груз 3 и ХВОСТ013ИК 12 вследствие того, что силы рцб и рцб находятся на одной линии, но имеют противоположное направление, обеспечивают надежную ориентацию конической части груза 3 относительно седла 4, что повышает точность датдинен с каналом 8 слива через седло 4, выполненную в роторе полость 9 и отверстие 10. 5 чика, в частности при неравномерном вра- Канал 11 соединяет внутреннюю полостьщении ротора. Причем чем выще угловая
корпуса с внешней системой.
Груз 3 снабжен хвостовиком 12, расположенным по другую сторону оси вращения.
скорость ротора, тем устойчивее положение груза 3 и стабильнее зазор между грузом и седлом, а следовательно, стабильнее расход через клапан.
20
скорость ротора, тем устойчивее положение груза 3 и стабильнее зазор между грузом и седлом, а следовательно, стабильнее расход через клапан.
Формула изобретения Гидромеханический датчик угловой скоДатчик работает следующим образом.
При неподвижном роторе на груз 3 центробежная сила не действует, поэтому жидкость из канала 5 поступает через дроссель 6, отверстие 7, седло 4, полость 9 и
отверстие 10 в канал 8 слива и давле- 25 рости по авт. св. № 708317, отличаю- ние во внутреннем объеме корпуса стано-щийся тем, что, с целью повышения точвится равным давлению в канале 8 слива.
При вращении ротора груз 3 под действием центробежной силы прижимается к седлу 4 и жидкость из канала 5, посности датчика, в полоски ротора центробежный груз снабжен хвостовиком, расположенным по другую сторону оси вращения ротора.
тупая через дроссель 6, отверстие 7, седло 4, полость 9 и отверстие 10 в канал 8 слива, преодолевает соп)отивленке, .создаваемое клапаном протоку жидкости. При этом давление перед клапаном соответствует угловой скорости вращения ротора.
Центробежная сила, действующая на груз 3 с хвостовиком 12, равна Fuo - Fus, где Рцб - центробежная сила груза 3; Рцб - центробежная сила хвостовика 12.
Т.е. груз 3 и ХВОСТ013ИК 12 вследствие того, что силы рцб и рцб находятся на одной линии, но имеют противоположное направление, обеспечивают надежную ориентацию конической части груза 3 относительно седла 4, что повышает точность датчика, в частности при неравномерном вра- щении ротора. Причем чем выще угловая
скорость ротора, тем устойчивее положение груза 3 и стабильнее зазор между грузом и седлом, а следовательно, стабильнее расход через клапан.
Формула изобретения Гидромеханический датчик угловой скоти по авт. св. № 708317, отличаю- йся тем, что, с целью повышения точности датчика, в полоски ротора центробежный груз снабжен хвостовиком, расположенным по другую сторону оси вращения ротора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидромеханический датчик угловой скорости | 1984 |
|
SU1236437A2 |
| Гидромеханический датчик угловой скорости | 1978 |
|
SU708317A1 |
| Гидромеханический датчик угловой скорости | 1985 |
|
SU1612279A1 |
| Датчик угловой скорости | 1985 |
|
SU1257621A1 |
| Датчик угловой скорости | 1985 |
|
SU1290273A1 |
| Датчик угловой скорости | 1984 |
|
SU1293707A1 |
| Гидромеханический датчик угловой скорости | 1984 |
|
SU1254446A2 |
| Гидромеханический датчик угловой скорости | 1987 |
|
SU1462263A2 |
| Всережимный гидравлический регулятор числа оборотов | 1984 |
|
SU1264147A2 |
| СПОСОБ РЕГУЛИРОВАНИЯ УГЛОВОГО ВЗАИМОПОЛОЖЕНИЯ ВЕДУЩЕГО И ВЕДОМОГО ВАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2088777C1 |
Изобретение относится к технике регулирования угловой скорости. Цель изобретения - повышение точности датчика. Гидромеханический датчик содержит корпус I и ротор 2, внутри которого размеш,ен клапан, выполненный в виде центробежного груза 3, опирающегося на седло 4. Груз 3 снабжен хвостовиком 12, размещенным по другую сторону оси вращения. Груз 3 и хвостовик 12 из-за того, что их центробежные силы находятся на одной линии, но имеют противоположное направление, обеспечивают надежную ориентацию конической части груза относительно седла 4, что по- выщает точность датчика, особенно при неравномерном вращении ротора. I ил. (Л оо N СО ISJ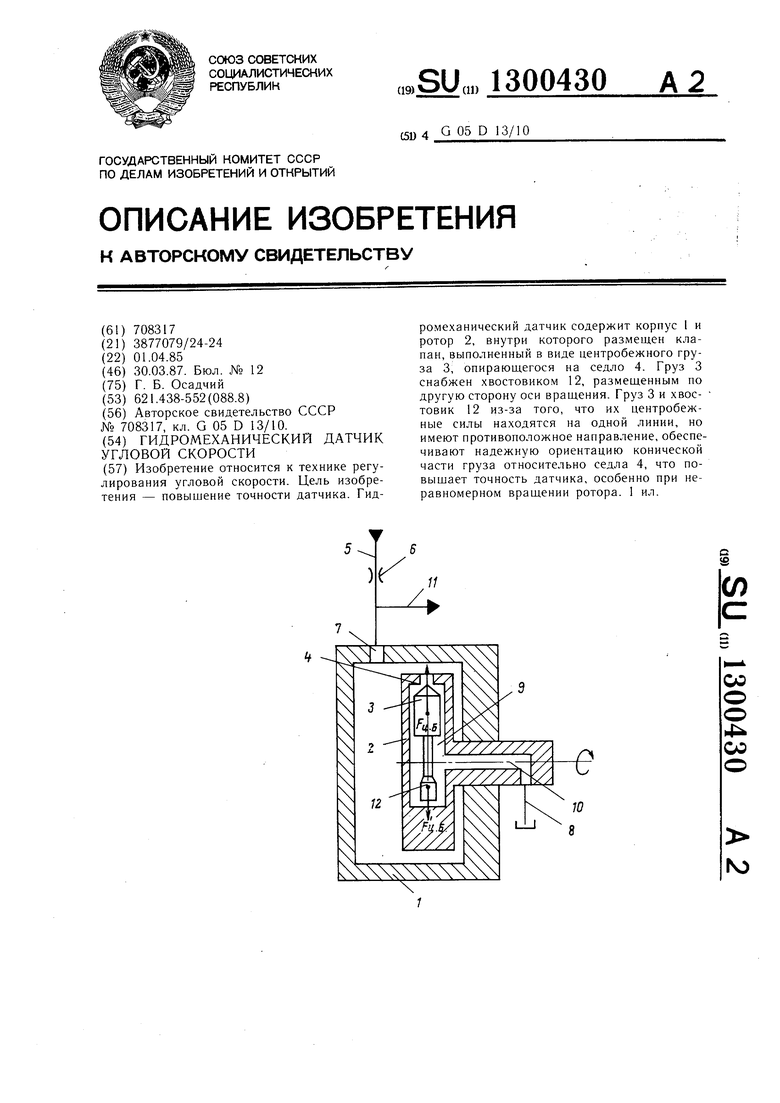
| Гидромеханический датчик угловой скорости | 1978 |
|
SU708317A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
