11302052
Изобретение относится к машиностроению, в частности к механизмам с поступртельно перемещающимся относительно неподвижной стойки толкателем с силовым замыканием его в одном направлении упругим звеном, и может быть использовано в кулачковых механизмах и амортизаторах.
Цель изобретения - повьшение скорости срабатывания за счет выполнения на упоре и толкателе винтовой на- с резьбой противоположного направления .
На чертеже изображен предлагаемый механизм.
Механизм поступательного перемещения содержит неподвижную стойку 1, поступательно перемещающийся толкатель 2, упругое звено 3, размещенное
Если от усилия упругого звена 3 требуется обеспечить перемещение толкателя 2 влево, то при ( необходимо, чтобы уменьшение величины де- 5 формации упругого звена 3 сопровождалось увеличением его длины, для чего служит, например, пружина сжатия.
Если от усилия упругого звена 3 требуется обеспечить перемещение толкателя 2 влево, то при , необходимо, чтобы уменьшение величины деформации упругого звена 3 сопровождалось уменьшением его длины, для чего служит, например, пружина растяжения.
Если от усилия упругого звена 3 требуется обеспечить перемещение толкателя 2 вправо, то при 5 -с S необfO
15
ходимо, чтобы уменьшение величины деформации упругого звена 3 сопровож- между толкателем 2 и упором 4, Посту-20 далось уменьшением его длины, для петельное перемещение толкателя 2 от- чего служит например, пружина рас- нрсительно неподвижной стойки 1 обеспечивается с помощью штифта 5. Упор 4 входит в несамотормозящую винтовую
тяжения.
Если от усилия упругого звена 3
пару, ход которой 5„, с н подвюкной. требуется обеспечить перемещение толкателя 2 вправо, то при S, необходимо, чтобы уменьшение величины деформации упругого звена 3 сопровождалось увеличением его длины, для
стойкой 1 и в несамотормозящую винтовую пару, ход которой S,, с толкателем 2, причем и 82 - 25,, Упругое звено 3, предварительно деформи- ррванное, размещено между упором 4 и толкателем 2. На упоре 4 и толкателе 2 расположена винтовая нарезка с резьбой противоположного направления по отношению к винтовой паре упор 4 - неподвижная стойка 1.
Механизм работает следующим образом.
Предварительно деформированное уп- толкателя, а обеспечение изменения ругое звено 3 стремится восстановить 40 величины деформации упругого звена на. свой р азмер, который оно имеет в сво- меньшую величину, чем осуществлено бодном состоянии, вследствие чего перемещение толкателя, обуславливает- усилием упругого звена 3 производится перемещение толкателя 2 относималое изменение величины нагрузки, передаваемой упругим звеном толкателю
тельно упора 4, Поступательное перемещение толкателя 2 вызывает поворот упора 4 относительно толкателя 2, а поскольку упор 4 поворачивается одновременно и относительно неподвижной
стойки 1, происходит и поступательное 50 поступательно перемещающийся толкаперемещение упора 4 относительно не- подв1-ганой стойки 1. Поступательное перемещение толкателя 2 и упора 4 относительно неподвижной стойки 1 происходит в одном направлении, при этом поступательное перемещение толкателя 2 по величине больше, чем величина изменения деформации упругого звена 3.
тель, упор, образующий винтовую пару с неподв1-1жной стойкой, и упругое зве но, размещенное между толкателем и упором, отличающийся тем с что, с целью повышения скорости срабатывания, на упоре и толкателе рас- -положены винтовая нарезка с резьбой противоположного направления по отно шению к винтовой паре упор - неподЕсли от усилия упругого звена 3 требуется обеспечить перемещение толкателя 2 влево, то при ( необходимо, чтобы уменьшение величины де- формации упругого звена 3 сопровождалось увеличением его длины, для чего служит, например, пружина сжатия.
Если от усилия упругого звена 3 требуется обеспечить перемещение толкателя 2 влево, то при , необходимо, чтобы уменьшение величины деформации упругого звена 3 сопровождалось уменьшением его длины, для чего служит, например, пружина растяжения.
Если от усилия упругого звена 3 требуется обеспечить перемещение толкателя 2 вправо, то при 5 -с S необ
ходимо, ч формации далось ум чего служ
тяжения.
имо, чтобы уменьшение величины д мации упругого звена 3 сопровож- ось уменьшением его длины, для о служит например, пружина рас-
Если от усилия упругого звена 3
требуется обеспечить перемещение толкателя 2 вправо, то при S, необходимо, чтобы уменьшение величины деформации упругого звена 3 сопровождалось увеличением его длины, для
чего служит, например, пружина сжатия.
Чем меньше разница по величине между S,. и S, , тем меньше изменение величины деформации упругого звена 3 при неизменном ходе толкателя 2.
Таким образом, в предлагаемом механизме можно установить упругое зве- но высокой жесткости, вследствие че- го увеличивается скорость перемещения
толкателя, а обеспечение изменения величины деформации упругого звена на. меньшую величину, чем осуществлено перемещение толкателя, обуславливает-
малое изменение величины нагрузки, передаваемой упругим звеном толкателю.
45
Форм5 ла изобретения
Механизм поступательного перемещения,, содержащий неподвияшую стойку.
тель, упор, образующий винтовую пару с неподв1-1жной стойкой, и упругое звено, размещенное между толкателем и упором, отличающийся тем, что, с целью повышения скорости срабатывания, на упоре и толкателе рас- -положены винтовая нарезка с резьбой противоположного направления по отношению к винтовой паре упор - непод313020524
вижная стойка, винтовые пары упор - ка выбрана из услов1ш , и S,S, неподвижная стойка и упор-толкатель- где S, - ход винтовой пары упор - насамотормозящие, а величина хода Sj ,. толкатель; S - ход винтовой пары винтовой пары упор - неподвижная стой- упор - неподвижная стойка.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПРИВОДА ТКАНЕНАПРАВЛЯЮЩИХ РОЛИКОВ ПРОМЫВНЫХ МАШИН ОТДЕЛОЧНОГО ТЕКСТИЛЬНОГО ПРОИЗВОДСТВА | 2007 |
|
RU2350704C2 |
| Устройство для регулирования натяжения нитевидного материала при размотке | 1987 |
|
SU1493578A1 |
| ПРОХОДНОЙ ЗАПОРНЫЙ КЛАПАН, САМОЗАКРЫВАЮЩИЙСЯ ПРИ ОТСУТСТВИИ ДАВЛЕНИЯ НА ЕГО ВХОДЕ | 2003 |
|
RU2258167C1 |
| ОПИСАНИЕ ИЗОБРЕТЕНИЯ | 1973 |
|
SU396182A1 |
| Сборочная головка с автопоиском | 1984 |
|
SU1227401A1 |
| СОЕДИНЕНИЕ ДЛЯ КОМПЕНСАЦИИ ОТПУСКАНИЯ ПНЕВМАТИЧЕСКОГО ТОРМОЗА ДЛЯ РЕЛЬСОВЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2014 |
|
RU2661250C2 |
| БЕЗГИЛЬЗОВЫЙ ПАТРОН | 2009 |
|
RU2413167C1 |
| ФИКСАТОР И СПОСОБ ФИКСАЦИИ, ОБЕСПЕЧИВАЮЩИЕ ОСВОБОЖДЕНИЕ УДЕРЖИВАЕМОГО ЗВЕНА ПРИ ЗАДАННОМ МАКСИМАЛЬНОМ ЗНАЧЕНИИ СИЛЫ | 2007 |
|
RU2401948C2 |
| Модуль резонансного манипулятора | 1985 |
|
SU1298069A1 |
| Устройство для подачи брусков под пакет листов | 1990 |
|
SU1819714A1 |
Изобретение относится к машиностроению. Цель изобретения - повышение скорости срабатывания за счет выполнения на упоре .и толкателе винтовой нарезки с резьбой противоположного направления. Для обеспечения положительного эффекта предварительно деформированное упругое звено 3 стремится восстановить свой размер. Происходит перемещение толкателя 2 относительно упора 4. Последний поворачи вается одновременно и относительно неподвижной стойки 1 и происходит поступательное перемещение упора относительно неподвижной стойки. Толкатель 2 и упор 4 перемещаются в одном направлении. Поступательное перемещение толкателя по величине больше, чем изменяется величина деформации упругого звена 3. 1 ил. О) 2Z У///// у/л % У//Л//////////, У/////////. М о N3 о J ю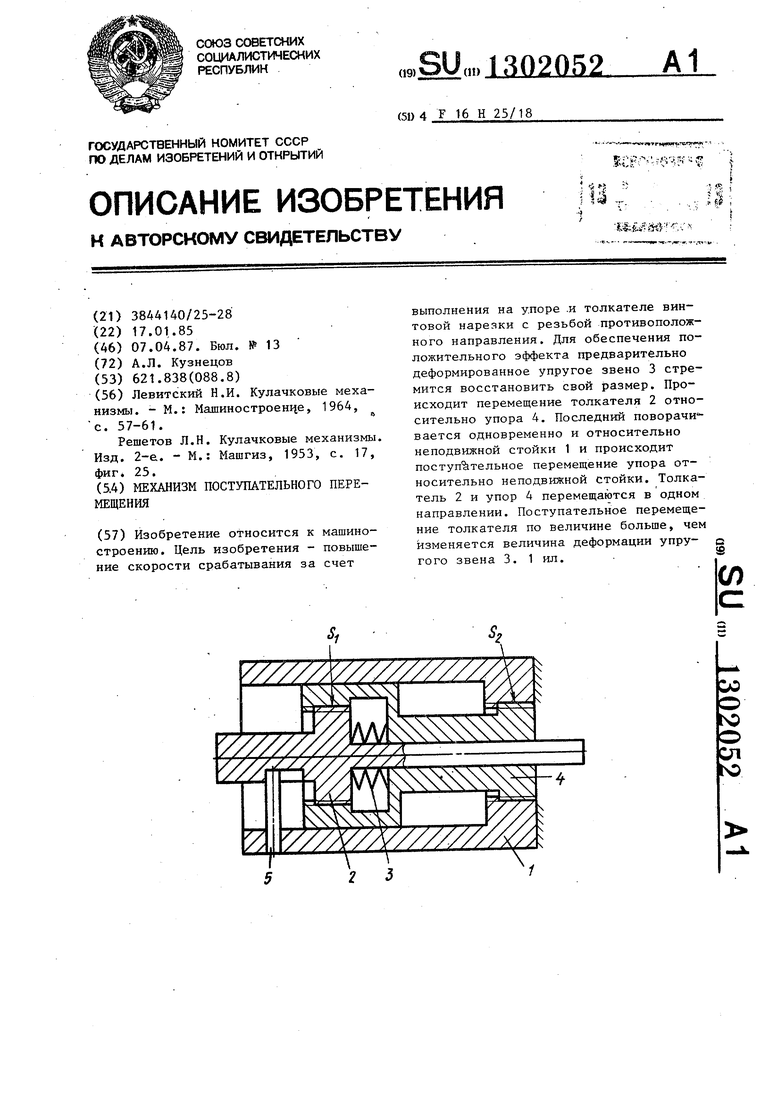
| Левитский Н.И | |||
| Кулачковые механизмы | |||
| - М.: Машиностроение, 1964, с | |||
| Способ получения на волокне оливково-зеленой окраски путем образования никелевого лака азокрасителя | 1920 |
|
SU57A1 |
| Решетов Л.Н | |||
| Кулачковые механизмы | |||
| Изд | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| - М.: Машгиз, 1953, с | |||
| Печь для сжигания твердых и жидких нечистот | 1920 |
|
SU17A1 |
