Изобретение относится к машиностроению, а именно к манипуляторам резонансного типа, предназначенным для механизации основных и вспомогательных операций в различных отраслях промышленности.
Целью изобретения является снижение энергозатрат.
На фиг. 1 изображен предлагаемый модуль, общий вид; на фиг. 2 - график
бодном положении, ниже - пружины, соединенные с подвижным звеном 2, находящимся в нейтральном положении, и затем пружины с подвижным звеном, находящимся в крайнем левом положении. Далее в аналогичных положениях изображены пружины, жесткость одной из которых, а именно пружины 8, увеличена за счет уменьшения на один количества ее рабочих витков. На графике упругих характеристик пруупругих характеристик пружин привода под- ю жин на оси абсцисс от точки ао вправо
15
вижного звена и сами пружины в положениях, соответствующих некоторым характерным точкам этих характеристик; на фиг. 3 - узел крепления пружин; на фиг. 4 - то же, второй вариант; на фиг. 5 - то же, третий вариант.
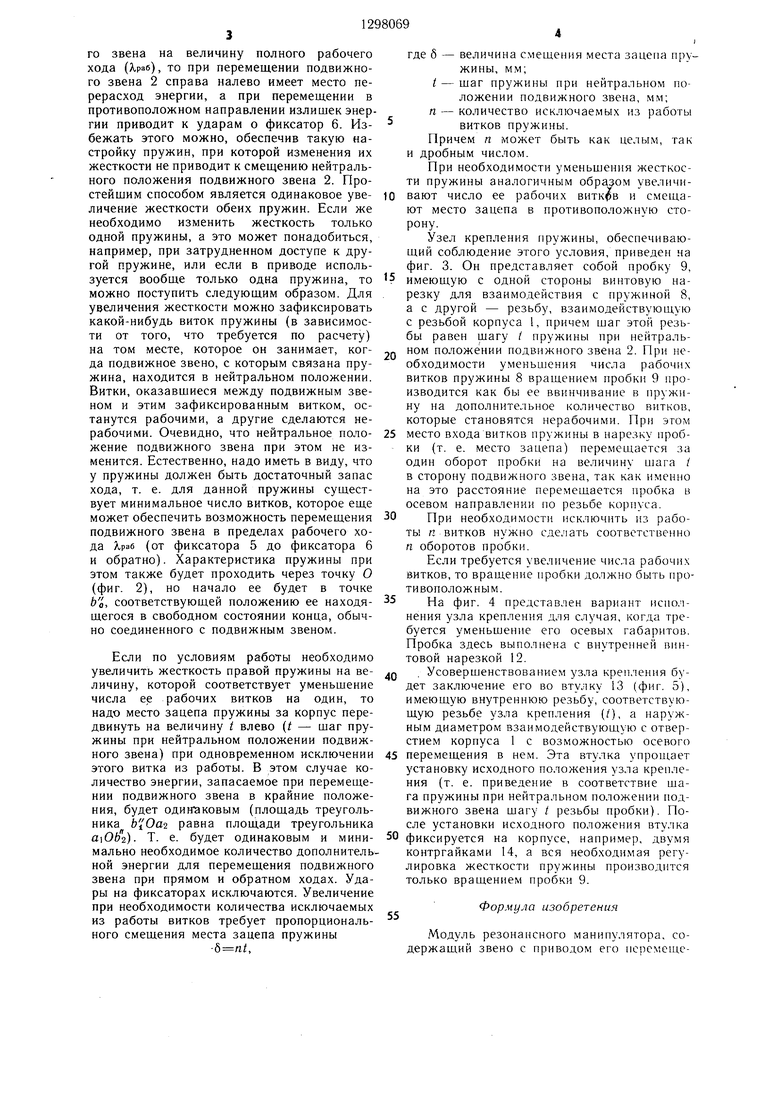
Модуль резонансного манипулятора состоит из корпуса 1 (фиг. 1), в котором размещено подвижное звено 2 с закрепленным на нем схватом 3, перемещающееся в опорах 4 качения и удерживаемое в край- них положениях фиксаторами 5 и 6. Перемещение обеспечивается приводом, снабженным пружинами 7 и 8 растяжения, каждая из которых закреплена одним концом на подвижном звене, а другим - на корпусе
отложена величина деформации левой пружины 7, от точки Ьо влево отложена величина деформации правой пружины 8, а по оси ординат - значения соответствующих этим деформациям усилий. Точка О, в которой пересекаются эти характеристики, является нейтральной и соответствует положению подвижного звена 2 при равном и направленном в противоположные стороны воздействии пружин 7 и 8. Звено 2 при этом находится в равновесии в точке Со. Будучи переведенным из этого положения в крайнее левое положение в точке Слев, где происходит срабатывание левого фиксатора 5, подвижное звено 2 запасается потенциальной энергией (соответствующей площади трес помощью узла 9 крепления, а также 25 угольника ai062), которая расходуется на его реверсивным двигателем 10, насадка 11 перемещение вправо, до момента срабатывания второго фиксатора 6 в точке . Потери, имеющие место при таком перемещении, компенсируются дополнительной энергией, поступающей от двигателя. Оказавшись
которого находится в контакте с подвижным звеном.
Модуль резонансного манипулятора работает следующим образом.
Подвижное звено 2, находясь в одном 30 g правом крайнем положении, подвижное
из крайних положении, например в левом, удерживается фи ксатором 5. При этом пружина 7 находится в сжатом, а пружина 8 - в растянутом состоянии. По команде от управляющего устройства (не показано) фиксатор 5 отпускает подвижное звено и оно под действием пружины 8 начинает движение в сторону фиксатора 6. При отсутствии потерь (например, на трение) подвижзвено 2 также запасается энергией (соответствующей площади треугольника biOaz), которая расходуется при его перемещении влево. Поскольку отрезки СоСлее и СоСир равны, то равны и площади треугольников aiOb и biOos, что говорит о равенстве энергии, запасаемой звеном в его крайних положениях. Следовательно, и количества до полнительной энергии, поступающей от двигателя 10 при прямом и обратно.м ходах.
ное звено только под действием пружины
перешло бы в противоположное крайнее должны быть равными, ложение.В случае, если жесткость одной из пру- Для компенсации этих потерь необходимжин, например правой, окажется больше двигатель 10, насадка И которого, воздей-жесткости левой пружины, ее характеристи- ствуя на подвижное звено, сообщает ему до-ка будет более крутой. Линия ЬоЬз, явля- полнительную энергию. Причем для обеспе-ющаяся характеристикой этой пружины, печения резонансной настройки, а следователь-45 ресечет линию аойз в точке О , т. е. нейтно, и наивысшей экономичности необходимо строгое соответствие параметров двигателя и пружин. Необходимость, например, увеличения скорости перемещения подвижного звена 2 требует увеличения мощности двигаральная точка сместится вправо (звено окажется в точке Со). Запас энергии подвижного звена 2, когда оно находится в правом крайнем положении, окажется меньше запаса его энергии в крайнем левом потеля 10 и соответствующего увеличения жест- 50 ложении (чему соответствуют площади тре- кости пружин.угольников и ). Это потребует разных количеств дополнительной энергии при перемещении подвижного звена 2 в прямом и обратном направлениях. ПоНа фиг. 2 сплошными линиями показаны характеристики исходных пружин с равной жесткостью, пунктирными - пружины с измененной жесткостью. Здесь же схематично изображены пружины 7 и 8 в положениях, соответствующих некоторым характерным точкам: сначала исходные пружины в сво55
скольку мощность двигателя 10 должна подбираться но максимально необходимому пределу, так как непременным условием является возможность перемещения подвижнободном положении, ниже - пружины, соединенные с подвижным звеном 2, находящимся в нейтральном положении, и затем пружины с подвижным звеном, находящимся в крайнем левом положении. Далее в аналогичных положениях изображены пружины, жесткость одной из которых, а именно пружины 8, увеличена за счет уменьшения на один количества ее рабочих витков. На графике упругих характеристик пру жин на оси абсцисс от точки ао вправо
отложена величина деформации левой пружины 7, от точки Ьо влево отложена величина деформации правой пружины 8, а по оси ординат - значения соответствующих этим деформациям усилий. Точка О, в которой пересекаются эти характеристики, является нейтральной и соответствует положению подвижного звена 2 при равном и направленном в противоположные стороны воздействии пружин 7 и 8. Звено 2 при этом находится в равновесии в точке Со. Будучи переведенным из этого положения в крайнее левое положение в точке Слев, где происходит срабатывание левого фиксатора 5, подвижное звено 2 запасается потенциальной энергией (соответствующей площади трезвено 2 также запасается энергией (соответствующей площади треугольника biOaz), которая расходуется при его перемещении влево. Поскольку отрезки СоСлее и СоСир равны, то равны и площади треугольников aiOb и biOos, что говорит о равенстве энергии, запасаемой звеном в его крайних положениях. Следовательно, и количества дополнительной энергии, поступающей от двигателя 10 при прямом и обратно.м ходах.
ральная точка сместится вправо (звено окажется в точке Со). Запас энергии подвижного звена 2, когда оно находится в правом крайнем положении, окажется меньше запаса его энергии в крайнем левом положении (чему соответствуют площади тре- угольников и ). Это потребует разных количеств дополнительной энергии при перемещении подвижного звена 2 в прямом и обратном направлениях. По55
скольку мощность двигателя 10 должна подбираться но максимально необходимому пределу, так как непременным условием является возможность перемещения подвижного звена на величину полного рабочего хода (Храб), то при перемещении подвижного звена 2 справа налево имеет место перерасход энергии, а при перемещении в противоположном направлении излишек энергии приводит к ударам о фиксатор 6. Из- бежать этого можно, обеспечив такую настройку пружин, при которой изменения их жесткости не приводит к смещению нейтрального положения подвижного звена 2. Простейшим способом является одинаковое уве- ю личекие жесткости обеих пружин. Если же необходимо изменить жесткость только одной пружины, а это может понадобиться, например, при затрудненном доступе к другой пружине, или если в приводе используется вообще только одна пружина, то 5 можно поступить следующим образом. Для увеличения жесткости можно зафиксировать какой-нибудь виток пружины (в зависимости от того, что требуется по расчету) на том месте, которое он занимает, когда подвижное звено, с которым связана пружина, находится в нейтральном положении. Витки, оказавшиеся между подвижным звеном и этим зафиксированным витком, останутся рабочими, а другие сделаются негде б - величина смещения места зацепа пружины, мм;
t - шаг пружины при нейтральном положении подвижного звена, мм;
п - количество исключаемых из работы витков пружины.
Причем п может быть как целым, так и дробным числом.
При необходимости уменьшения жесткости пружины аналогичным образом увеличивают число ее рабочих виткрв и смещают место зацепа в противоположную сторону.
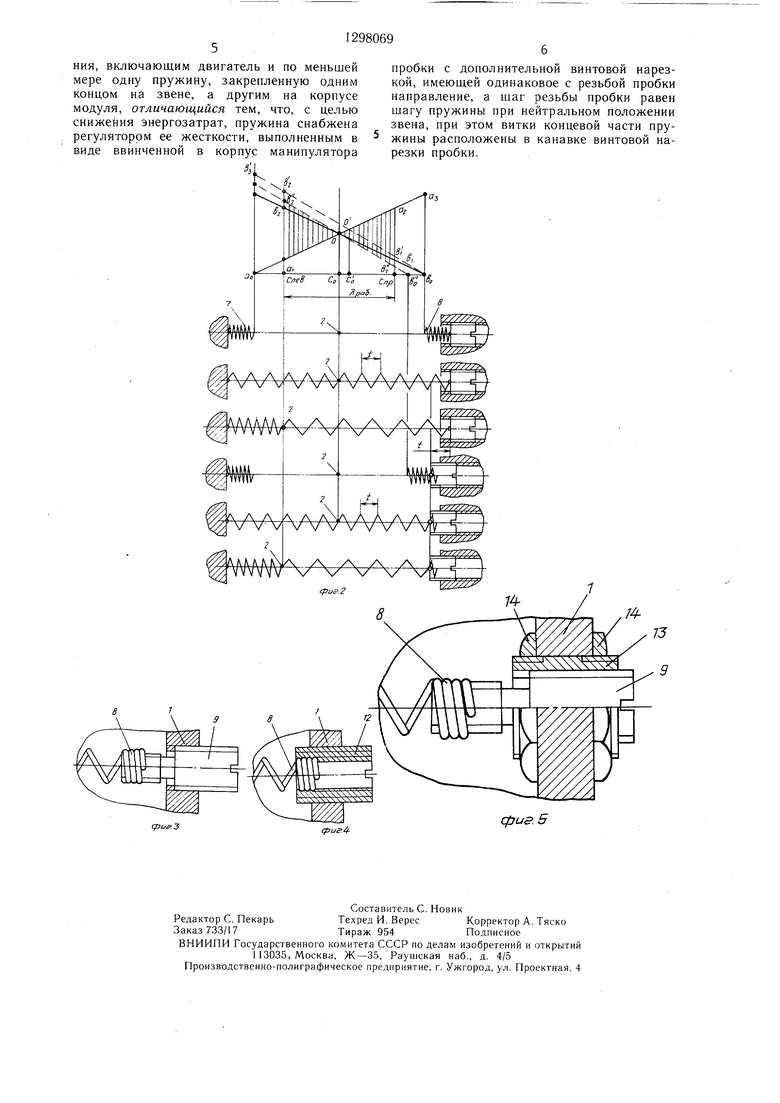
Узел крепления пружины, обеспечивающий соблюдение этого условия, приведен на фиг. 3. Он представляет собой пробку 9, имеющую с одной стороны винтовую нарезку для взаимодействия с пружиной 8, а с другой - резьбу, взаимодействующую с резьбой корпуса 1, причем шаг этой резьбы равен шагу / пружины при нейтраль- 2fj ном положении подвижного звена 2. При необходимости уменьшения числа рабочих витков пружины 8 вращением пробки 9 производится как бы ее ввинчивание в пружину на дополнительное количество витков, которые становятся нерабочими. При этом
рабочими. Очевидно, что нейтральное поло- 25 место входа витков пружины в нарезку проб- жение подвижного звена при этом не изменится. Естественно, надо иметь в виду, что у пружины должен быть достаточный запас хода, т. е. для данной пружины существует минимальное число витков, которое еще может обеспечить возможность перемещения 30 подвижного звена в пределах рабочего хода раб (от фиксатора 5 до фиксатора 6 и обратно). Характеристика пружины при этом также будет проходить через точку О (фиг. 2), но начало ее будет в точке Ь а, соответствующей положению ее находя- 35 щегося в свободном состоянии конца, обычно соединенного с подвижным звеном.
ки (т. е. место зацепа) перемещается за один оборот пробки на величину шага / в сторону подвижного звена, так как именно на это расстояние перемещается пробка в осевом направлении по резьбе корпуса.
При необходимости исключить из работы п витков нужно сделать соответственно п оборотов пробки.
Если требуется увеличение числа рабочих витков, то вращение пробки должно быть противоположным.
Па фиг. 4 представлен вариант исполнения узла крепления для случая, когда требуется уменьшение его осевых габаритов. Пробка здесь выполнена с внутренней винтовой нарезкой 12.
Если по условиям работы необходимо увеличить жесткость правой пружины на ве- Q личину, которой соответствует уменьшение числа ее рабочих витков на один, то надо место зацепа пружины за корпус передвинуть на величину t влево (t - шаг пружины при нейтральном положении подвижПа фиг. 4 представлен вариант исполнения узла крепления для случая, когда требуется уменьшение его осевых габаритов. Пробка здесь выполнена с внутренней винтовой нарезкой 12.
Усовершенствованием узла крепления будет заключение его во втулку 13 (фиг. 5), имеюшую внутреннюю резьбу, соответствующую резьбе узла крепления (t), а наружным диаметром взаимодействующую с отверстием корпуса 1 с возможностью осевого
ного звена) при одновременном исключении 45 перемещения в нем. Эта втулка упрощает
этого витка из работы. В этом случае количество энергии, запасаемое при перемещении подвижного звена в крайние положения, будет один 1ковым (площадь треугольника равна площади треугольника
установку исходного положения узла крепления (т. е. приведение в соответствие шага пружины при нейтральном положении подвижного звена шагу t резьбы пробки). После установки исходного положения втулка
)z). Т. е. будет одинаковым и мини- 50 фиксируется на корпусе, например, двумя мально необходимое количество дополнитель- контргайками 14, а вся необходимая регулировка жесткости пружины производится только вращением пробки 9.
НОИ энергии для перемещения подвижного звена при прямом и обратном ходах. Удары на фиксаторах исключаются. Увеличение при необходимости количества исключаемых из работы витков требует пропорционального смещения места зацепа пружины ,
55
Формула изобретения
Модуль резонансного манипулятора, содержащий звено с приводом его перемете
где б - величина смещения места зацепа пружины, мм;
t - шаг пружины при нейтральном положении подвижного звена, мм;
п - количество исключаемых из работы витков пружины.
Причем п может быть как целым, так и дробным числом.
При необходимости уменьшения жесткости пружины аналогичным образом увеличивают число ее рабочих виткрв и смещают место зацепа в противоположную сторону.
Узел крепления пружины, обеспечивающий соблюдение этого условия, приведен на фиг. 3. Он представляет собой пробку 9, имеющую с одной стороны винтовую нарезку для взаимодействия с пружиной 8, а с другой - резьбу, взаимодействующую с резьбой корпуса 1, причем шаг этой резьбы равен шагу / пружины при нейтраль- ном положении подвижного звена 2. При необходимости уменьшения числа рабочих витков пружины 8 вращением пробки 9 производится как бы ее ввинчивание в пружину на дополнительное количество витков, которые становятся нерабочими. При этом
место входа витков пружины в нарезку проб-
место входа витков пружины в нарезку проб-
ки (т. е. место зацепа) перемещается за один оборот пробки на величину шага / в сторону подвижного звена, так как именно на это расстояние перемещается пробка в осевом направлении по резьбе корпуса.
При необходимости исключить из работы п витков нужно сделать соответственно п оборотов пробки.
Если требуется увеличение числа рабочих витков, то вращение пробки должно быть противоположным.
Па фиг. 4 представлен вариант исполнения узла крепления для случая, когда требуется уменьшение его осевых габаритов. Пробка здесь выполнена с внутренней винтовой нарезкой 12.
Усовершенствованием узла крепления будет заключение его во втулку 13 (фиг. 5), имеюшую внутреннюю резьбу, соответствующую резьбе узла крепления (t), а наружным диаметром взаимодействующую с отверстием корпуса 1 с возможностью осевого
перемещения в нем. Эта втулка упрощает
55
Формула изобретения
Модуль резонансного манипулятора, содержащий звено с приводом его переметения, включающим двигатель и по меньшейпробки с дополнительной винтовой нарез- мере одну пружину, закрепленную однимкой, имеющей одинаковое с резьбой пробки концом на звене, а другим на корпусенаправление, а шаг резьбы нробки равен модуля, отличающийся тем, что, с цельюшагу пружины при нейтральном положении снижейия энергозатрат, пружина снабженазвена, при этом витки концевой части пру- регуляторрм ее жесткости, выполненным в жины расположены в канавке винтовой на- виде ввинченной в корпус манипуляторарезки пробки.
SJ
Оъ
о
ffiuf.3
cpus4фи5.5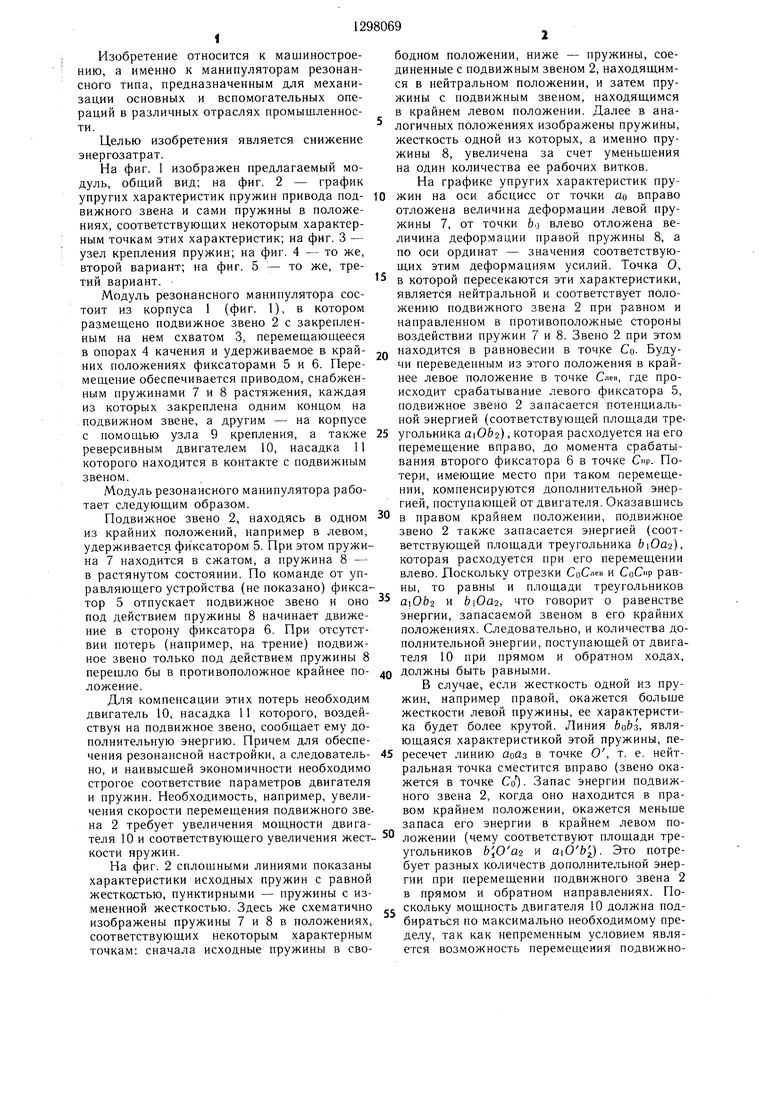
| название | год | авторы | номер документа |
|---|---|---|---|
| Модуль резонансного манипулятора | 1989 |
|
SU1712140A1 |
| Модуль резонансного манипулятора | 1989 |
|
SU1710335A1 |
| Модуль резонансного манипулятора | 1988 |
|
SU1576304A1 |
| Модуль вертикального перемещения | 1986 |
|
SU1386444A1 |
| Модуль резонансного манипулятора | 1988 |
|
SU1662839A1 |
| РЕГУЛЯТОР АВТОКОЛЕБАНИЙ | 1992 |
|
RU2006902C1 |
| УСТРОЙСТВО ДЛЯ ПРОТИВОПОЖАРНОЙ ЗАЩИТЫ АВТОМОБИЛЯ | 2022 |
|
RU2790891C1 |
| Модуль резонансного манипулятора | 1988 |
|
SU1662837A1 |
| Модуль вертикального перемещения | 1984 |
|
SU1229032A1 |
| Устройство для привода скважинного штангового насоса | 1990 |
|
SU1809863A3 |
Изобретение относится к машиностроению, а именно к манипуляторам резонансного тина, нредназначенным для механизации основных и вспомогательных операций в различных отраслях промышленности. Целью изобретения является снижение энергозатрат за счет обеспечения возможности регулирования жесткости упругих элементов для согласования их характеристик с характеристиками двигателя. Звено 2, находясь в одном из крайних положений, например в левом, удерживается фиксатором 5. При этом пружина 7 находится в сжатом, а пружина 8 в растянутом состоянии. По команде от управляюш,его устройства фиксатор 5 отпускает подвижное звено и они под действием пружины 8 и двигателя 12 начинает движение в сторону фиксатора 6 и т. д. Двигатель служит для компенсации потерь, например, на трение. Мощность двигателя и жесткость пружин для заданной скорости перемещения должны находиться в строгом соответствии для получения резонансного режима, при котором потребляемая энергия минимальна. Жесткость пружины, например 8, подстраивается вращением пробки 9, ввинченной в корпус 1 или втулку 10. На пробке 9 выполнена винтовая нарезка, в канавке которой расположены витки пружины 8. За счет того, что щаги резьбы равны щагу пружины 8 при нейтральном положении звена 2, изменения ее жесткости происходят без изменения нейтрального положения звена 2. 5 ил. (Л N3 ) 00 О О5 со
| Манипулятор с цикловым управлением | 1978 |
|
SU738865A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
