11
Изобретение относится к станкостроению и может быть использовано в металлообрабатывающих станках с автоматической сменой инструментов.
Цель изобретения - упрощение сие- темы управления устройством и сокращение времени смены инструмента за счет применения бесприводного захватного органа.
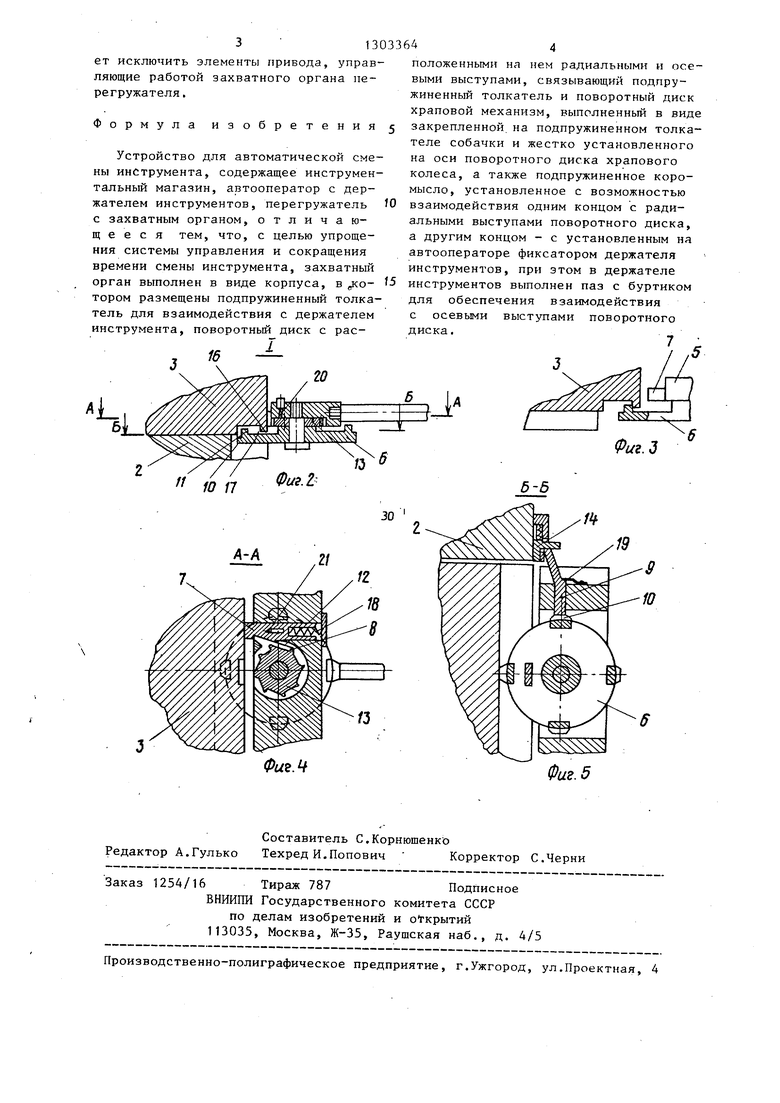
На фиг. 1 представлено устройство общий вид; на фиг. 2 - узел I на фиг. 1; на фиг. 3 - положение держателя инструментов и захватного органа в позиции перегрузки; на фиг.4 - сечение А-А на фиг. 2; на фиг. 5 - сечение Б-Б на фиг.2.
Устройство для автоматической смены инструмента содержит инструментальный магазин 1, автооператор 2 с держателем инструмента 3 и перегру жатель 4 с захватным органом 5.
В корпусе захватного орга.на 5 размещены поворотный диск 6, подпружиненный толкатель 7, храповой механизм 8 и подпружиненное коромысло 9
Поворотный диск 6 имеет равномерно расположенные по окружности радиальные 10 и осевые 11 выступы.
Собачка 12 храпового механизма 8 закреплена на толкателе 7, а храпово колесо 13 жестко установлено на оси поворотного диска 6.
Фиксация держателя инструмента 3 на автооператоре 2 осуществляется с помощью установленных на автоопер ато ре 2 фиксатора 14 и упора 15.
Коромысло 9 выполнено с возможностью взаимодействия одним концом с фиксатором 14, а другим - с радиальными выступами 10 поворотного диска
выступы 11 поворотного диска 6 имеют возможность взаимодействи с буртиком 16 паза 17, выполненного в держателе инструментов 3.
Возврат толкателя 7 и коромысла 9 в исходное положение обеспечивается соответственно пружинами 18 и 19.
Свободному повороту диска 6 препятствует подпружиненный шарик 20, а штифт 21 ограничивает ход толкателя 7. Поворот магазина инструментов в заданную позицию обеспечивает элекродвигатель 22.
Устройство работает следующим об- разом.
По команде Смена инструмента автооператор 2 переносит отработавший держатель инструмента 3 в позицию
J5
20
25
5, О
,,
.
„
30
40
50
перегрузки, а захватный орган 5 перегружателя 4 перемещается из крайне- правого положения по направлению к автооператору 2. При подходе органа 5 к держателю инструмента 3 (фиг. 4) толкатель 7 с собачкой 12 останавливается после его упора в держатель инструмента 3, а так как захватный орган 5 продолжает перемещение, то под действием собачки 12 храповое колесо 13, а вместе с ним и диск 6 по360
ворачиваются на уголЫ
2п
где п - 6 (в данколичество выступов на диске ном случае и ). Радиальный выступ 10 (фиг. 5) диска 6 нажимает на коромысло 9, которое утапливает фиксатор 14, освобождая держатель инструмента 3 на автооператоре 2, при этом осевой выступ 11 заходит в паз 17 держателя инструмента 3.
Затем захватный орган 5 начинает перемещаться от автооператора 2, причем осевой выступ t1 диска 6 движется в пазу 17 держателя инструмента 3 до упора в буртик 16. Толкатель 7 под действием пружины 18 остается неподвижен, а собачка 12 храпового механизма, 8 проскальзывает по зубьям храпового колеса 13, т.е. храповый механизм 8 взводится. По мере даль- лейшего продвижения захватного органа 5 держатель инструмента 3 выдвигается из автооператора 2 и устанавливается на свободное место в магазине 1 .
После поворота магазина 1 новьй держатель инструмента 3 устанавливается подпружиненным толкателем 7 в автооператор 2 до упора 15. При остановке держателя инструмента 3 толкатель 7 сжимает пружину 18 и
собачкой 12 поворачивает диск 6 на 45 . f В результате зтого осевой выступ 11 диска 6 выходит из паза 17, а радиальный выступ 10 освобождает коромысло 9, которое опускается, давая возможность фиксатору 14 застопорить новый держатель инструмента 3 на автооператоре 2. Захватный орган 5 возвращается в крайне-правое положение, а автооператор 2 переносит новый держатель инструмента 3 к рабочей позиции станка.
Устройство обеспечивает ускоренный обмен инструмента между магазином и автооператором, а также отличается простотой, поскольку позволяет исключить элементы привода, управляющие работой захватного органа перегружателя ,
Формула изобретения 5
Устройство для автоматической смены инструмента, содержащее инструментальный магазин, автооператор с держателем инструментов, перегружатель с захватным органом, отличающееся тем, что, с целью упрощения системы управления и сокращения времени смены инструмента, захватньш орган выполнен в виде корпуса, в ротором размещены подпружиненный толкатель для взаимодействия с держателем инструмента, поворотный диск с расТА« 16
5
33644
положенными на нем радиальными и осевыми выступами, связывающий подпружиненный толкатель и поворотный диск храповой механизм, выполненный в виде закрепленной на подпружиненном толкателе собачки и жестко установленного на оси поворотного диска храпового
колеса, а также подпружиненное коромысло, установленное с возможностью
взаимодействия одним концом с радиальными выступами поворотного диска, а другим концом - с установленным на автооператоре фиксатором держателя инструментов, при этом в держателе
инструментов выполнен паз с буртиком для обеспечения взаимодействия с осевыми выступами поворотг ого диска.
Фиг. 5
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматической смены инструмента | 1989 |
|
SU1668095A1 |
| Устройство для автоматической передачи инструмента | 1976 |
|
SU656803A1 |
| Технологический комплекс для обработки цилиндрических деталей | 1989 |
|
SU1761436A2 |
| АВТОМАТ для РЕЗКИ И МАРКИРОВКИ ХЛОРВИНИЛОВЫХ ТРУБОК | 1973 |
|
SU363611A1 |
| Магазин корабельной артиллерийской установки | 2014 |
|
RU2607700C2 |
| Устройство для выдачи билета и сдачи | 1979 |
|
SU868800A1 |
| Устройство для зажима инструмента в шпинделе | 1983 |
|
SU1113218A1 |
| Многооперационный станок с устройством автоматической смены инструментов | 1986 |
|
SU1445901A1 |
| Устройство для автоматической смены инструмента | 1988 |
|
SU1701474A1 |
| Автооператор для подачи плоских заготовок в обрабатывающую машину | 1988 |
|
SU1539082A1 |
Изобретение относится к области станкостроения и может быть использовано в металлообрабатывающих станках с автоматической сменой инструмента. Целью изобретения является упрощение системы управления устройством и сокращение времени смены инструмента за счет применения бесприводного захватного органа. Устройство содержит магазин 1, автооператор 2, держатель инструмента 3, перегружатель 4, на котором установлен бесприводной захватный орган 5, содержащий диск с радиальными и осевыми выступами, храповое к.олесо, установленное на оси диска, толкатель для взаимодействия с держателем инструмента 3. На толка- .теле установлена собачка для поворота храпового колеса вместе с диском. На держателе инструмента 3 выполнены паз и бурт для взаимодействия с осевыми пазами диска. 5 ил. с @ (Л со о со со 05 4 (Риг.1
Составитель С.Корнющенко Редактор А.Гулько Техред И,Попович Корректор С.Черни
Заказ 1254/16 Тираж 787Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
| СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК ДЛИНЫ ГРУППЫ ТЕКСТИЛЬНЫХ ВОЛОКОН | 2003 |
|
RU2234676C1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Устройство для автоматической смены инструментов | 1979 |
|
SU872184A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
