ного основания и попадает в цилиндрическую часть фигурного паза поворотного диска, В этот момент пружинные пластины захвата механической руки разжаты. При включении пресса ползун 34 приводит в движение через реечную передачу шестерню 26. Последняя передает вращение шестерне 27, затем через рычажные механизмы 28 и 29 корпусам 30 и 31, которые вращаюд1 храповые колеса 24 и 25. Происходит вращение вала 21 с поворотным диском. Последний перемещает заготовку к месту захвата механической руки. В момент совмещения осевой линии механической руки и оси цилиндрической поверхности фигурного паза диска с вертикаль,ной плоскостью, проходящей через валы 1 и 21, происходит перемещение элементов, соединяющих пластины захвата с валом 1, в результате чего они сжимаются, захыватывая заготовку. При следующем рабочем ходе ползуна 34 собачки 32 и 33, вращая храповые колеса 24 и 25 перемещают механическую руку с заготовкой в рабочую зону пресса,где; происходит вырубка детали. Она удаляется из матрицы рукой другого механизма. Одновременно с этим вторая механическая рука производит захват заготовки из механизма поштучной выдачи, а третья освобождает из хвата отход. 1 з.п. ф-лы. 6 ил.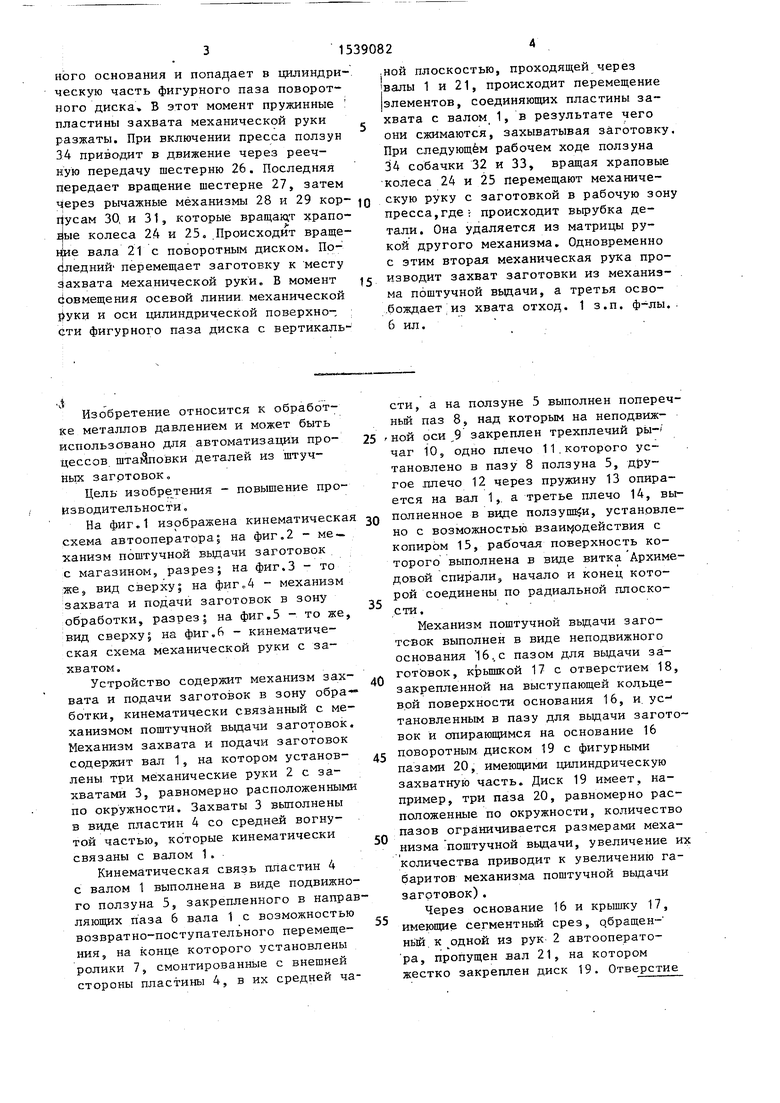
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для поштучной выдачи деталей | 1988 |
|
SU1608000A1 |
| Автоматизированный комплекс для штамповки | 1985 |
|
SU1291253A1 |
| Агрегат для брикетирования штучных изделий | 1976 |
|
SU653136A1 |
| ПОТОЧНАЯ ЛИНИЯ ДЛЯ ПРОИЗВОДСТВА БАРАНОЧНЫХ ИЗДЕЛИЙ | 1965 |
|
SU214451A1 |
| Устройство для пакетирования бревен и выравнивания их торцов | 1974 |
|
SU602436A1 |
| Роторно-конвейерная машина | 1985 |
|
SU1286428A1 |
| Устройство Кривовязюка для вырубки заготовок из плоского материала | 1980 |
|
SU946733A1 |
| Устройство для упаковки штучных изделий в картонные коробки | 1986 |
|
SU1458279A1 |
| Автомат для фрезерования пазов | 1988 |
|
SU1593898A1 |
| Устройство для выдачи и ориентации штучных заготовок | 1987 |
|
SU1479178A1 |
Изобретение относится к обработке металлов давлением и может быть использовано для автоматизации процессов штамповки деталей из штучных заготовок. Цель изобретения - повышение производительности труда. Заготовки загружаются в магазин. При этом нижняя заготовка из стопы укладывается в паз для выдачи заготовок неподвижного основания и попадает в цилиндрическую часть фигурного паза поворотного диска. В этот момент пружинные пластины захвата механической руки разжаты. При включении пресса ползун 34 приводит в движение через реечную передачу шестерню 26. Последняя передает вращение шестерне 27, затем через рычажные механизмы 28 и 29 корпусам 30 и 31, которые вращают храповые колеса 24 и 25. Происходит вращение вала 21 с поворотным диском. Последний перемещает заготовку к месту захвата механической руки. В момент совмещения осевой линии механической руки и оси цилиндрической поверхности фигурного паза диска с вертикальной плоскостью, проходящей через валы 1 и 21, происходит перемещение элементов, соединяющих пластины захвата с валом 1, в результате чего они сжимаются, захватывая заготовку. При следующем рабочем ходе ползуна 34 собачки 32 и 33, вращая храповые колеса 24 и 25, перемещают механическую руку с заготовкой в рабочую зону пресса, где происходит вырубка детали. Она удаляется из матрицы рукой другого механизма. Одновременно с этим вторая механическая рука производит захват заготовки из механизма поштучной выдачи, а третья освобождает из захвата отход. 1 з.п. ф-лы, 6 ил.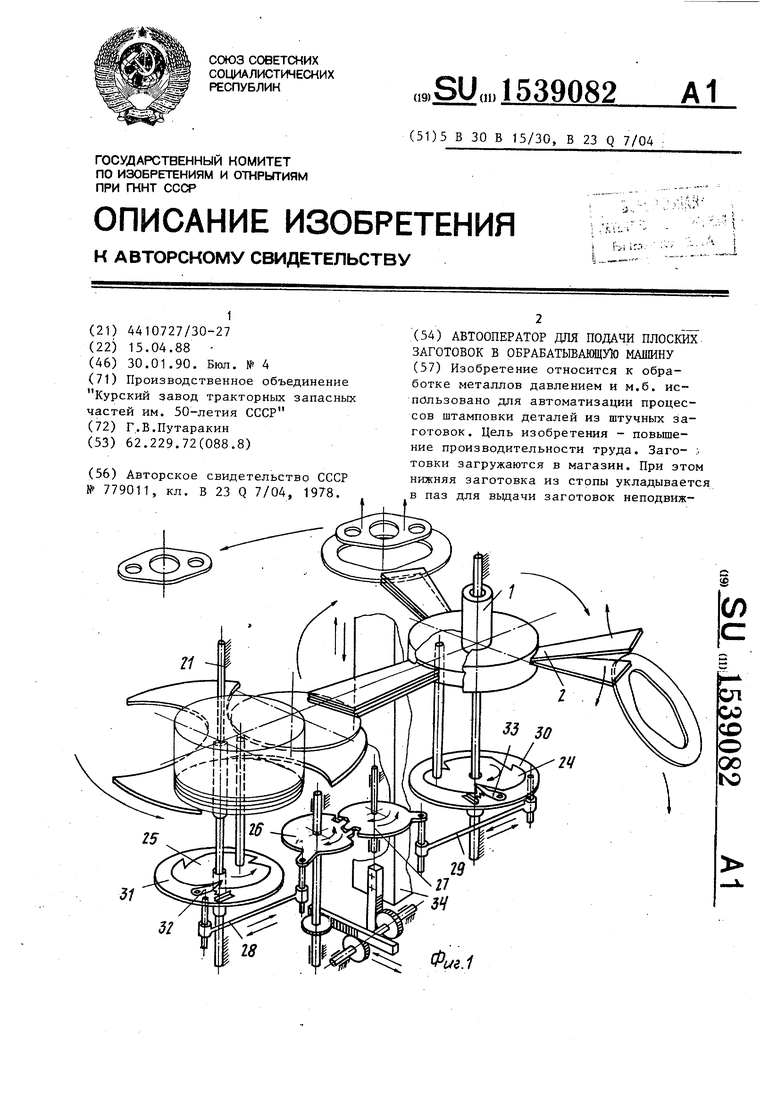
Изобретение относится к обработке металлов давлением и может быть использовано для автоматизации процессов штамповки деталей из штучных заготовок.
Цель изобретения - повышение производительности „
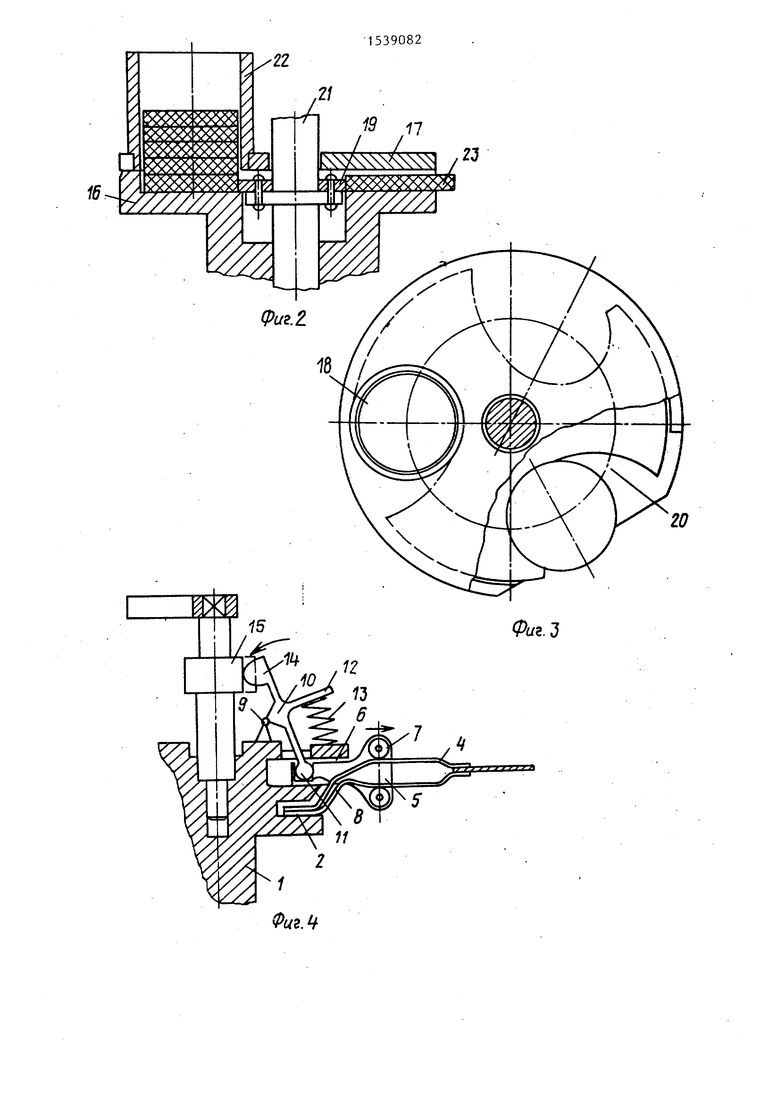
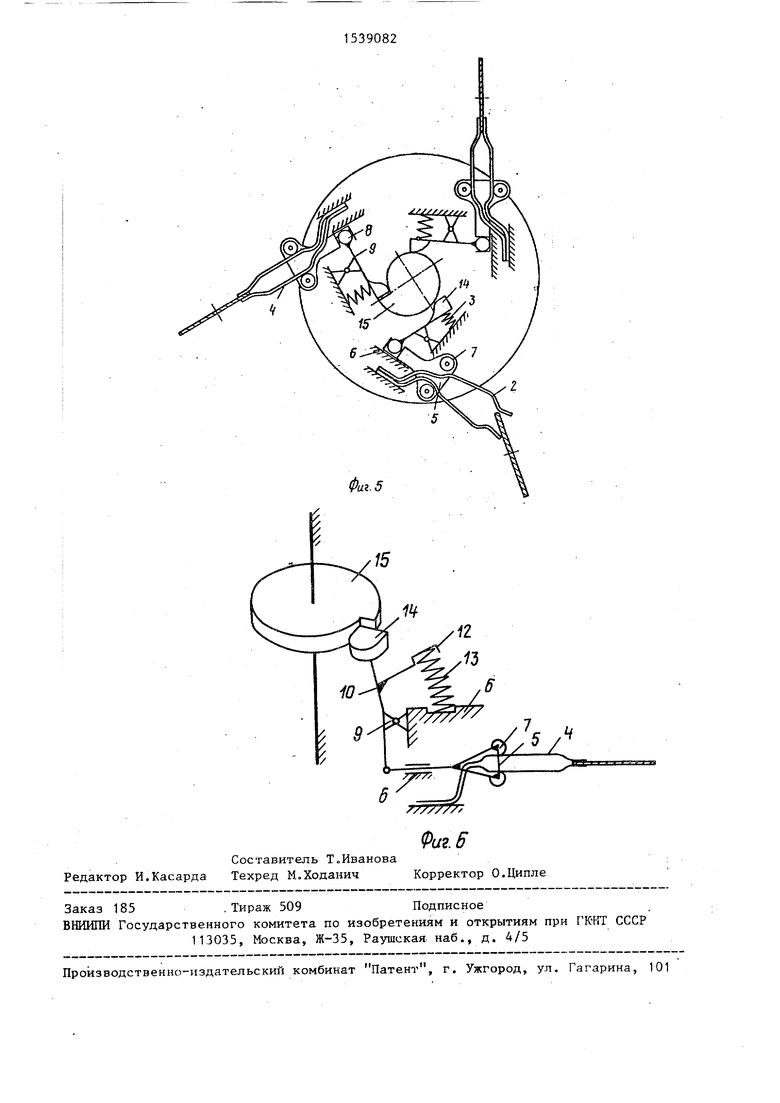
На фиг.1 изображена кинематическая схема автооператора; на фиг.2 - механизм поштучной выдачи заготовок с магазином, разрез; на фиг.З - то же, вид сверху; на фиг„4 - механизм захвата и подачи заготовок в зону обработки, разтэез; на фиг.З - то же, вид сверху; на фиг,6 - кинематическая схема механической руки с захватом.
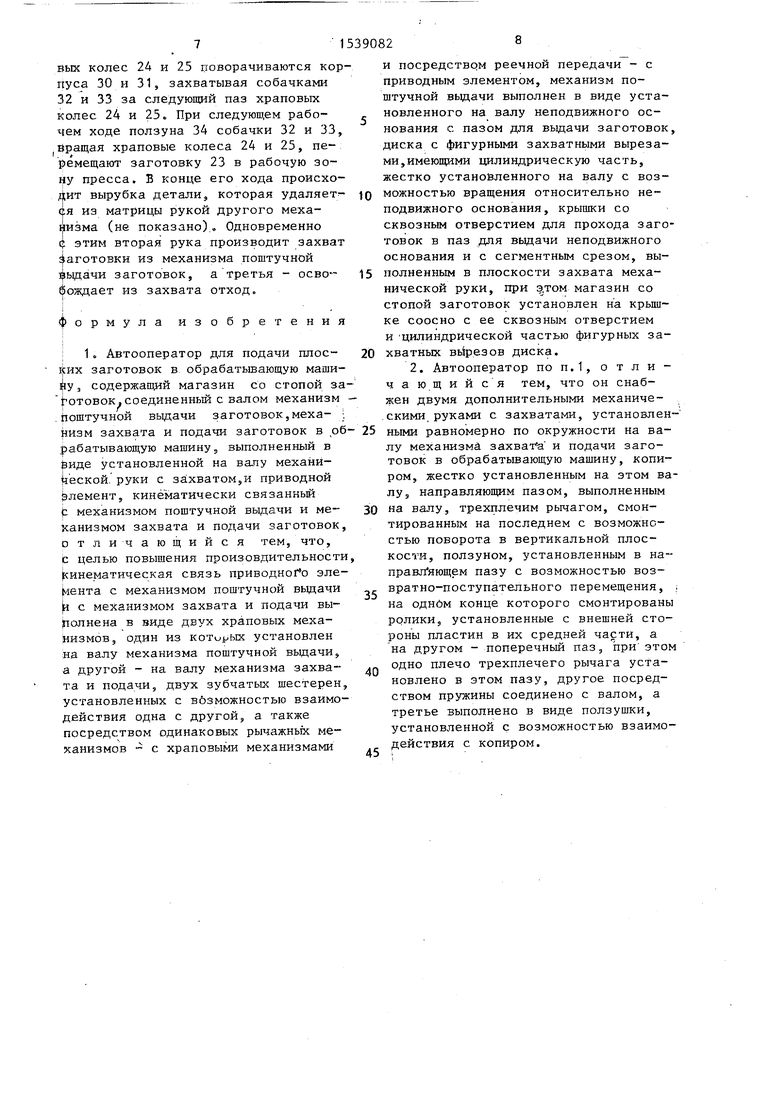
Устройство содержит механизм захвата и подачи заготовок в зону обработки, кинематически связанный с механизмом поштучной выдачи заготовок. Механизм захвата и подачи заготовок содержит вал 1, на котором установлены три механические руки 2 с захватами 3, равномерно расположенными по окружности. Захваты 3 выполнены в виде пластин 4 со средней вогнутой частью, которые кинематически связаны с валом 1.
Кинематическая связь пластин 4 с валом 1 выполнена в виде подвижного ползуна 5, закрепленного в направляющих паза 6 вала 1 с возможностью возвратно-поступательного перемещения, на конце которого установлены ролики 7, смонтированные с внешней стороны пластины 4, в их средней ча5
0
5
0
5
0
5
сти, а на ползуне 5 выполнен поперечный паз 8, над которым на неподвиж- ной оси 9 закреплен трехплечий ры- чаг 10, одно плечо 11 которого установлено в пазу 8 ползуна 5, другое плечо 12 через пружину 13 опирается на вал 1, а третье плечо 14, выполненное в виде ползущей, установлено с возможностью взаимодействия с копиром 15, рабочая поверхность которого выполнена в виде витка Архимедовой спирали, начало и конец которой соединены по радиальной плоскости.
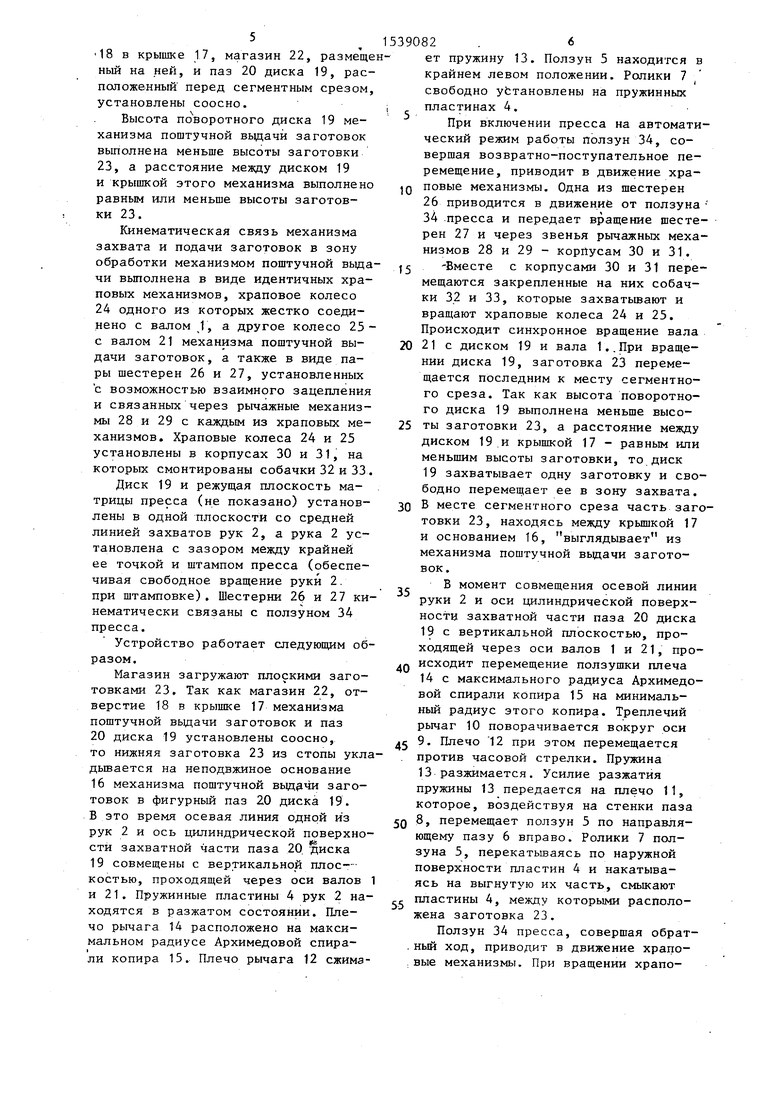
Механизм поштучной выдачи заготовок выполнен в виде неподвижного основания 16vc пазом для выдачи заготовок, крышкой 17 с отверстием 18, закрепленной на выступающей кольцевой поверхности основания 16, и установленным в пазу для выдачи заготовок и опирающимся на основание 16 поворотным диском 19 с фигурными пазами 20, имеющими цилиндрическую захватную часть. Диск 19 имеет, например, три паза 20, равномерно расположенные по окружности, количество пазов ограничивается размерами механизма поштучной выдачи, увеличение их количества приводит к увеличению габаритов механизма поштучной выдачи заготовок).
Через основание 16 и крышку 17, имеющие сегментньй срез, рбращен- ный к одной из рук 2 автооператора, пропущен вал 21, на котором жестко закреплен диск 19. Отверстие
18 в крышке 17, магазин 22, размещеный на ней, и паз 20 диска 19, расположенный перед сегментным срезом, установлены соосно.
Высота поворотного диска 19 механизма поштучной выдачи заготовок выполнена меньше высоты заготовки 23, а расстояние между диском 19 и крышкой этого механизма выполнено равным или меньше высоты заготовки 23.
Кинематическая связь механизма захвата и подачи заготовок в зону обработки механизмом поштучной выдачи выполнена в виде идентичных храповых механизмов, храповое колесо 24 одного из которых жестко соединено с валом 1, а другое колесо 25 - с валом 21 механизма поштучной выдачи заготовок, а также в виде пары шестерен 26 и 27, установленных с возможностью взаимного зацепления и связанных через рычажные механизмы 28 и 29 с каждым из храповых механизмов. Храповые колеса 24 и 25 установлены в корпусах 30 и 31, на которых смонтированы собачки 32 и 33.
Диск 19 и режущая плоскость матрицы пресса (не показано) установлены в одной плоскости со средней линией захватов рук 2, а рука 2 установлена с зазором между крайней ее точкой и штампом пресса (обеспечивая свободное вращение руки 2 при штамповке). Шестерни 26 и 27 кинематически связаны с ползуном 34 пресса.
Устройство работает следующим образом.
Магазин загружают плоскими заготовками 23, Так как магазин 22, отверстие 18 в крышке 17 механизма поштучной выдачи заготовок и паз 20 диска 19 установлены соосно, то нижняя заготовка 23 из стопы укладывается на неподвжиное основание 16 механизма поштучной выдачи заготовок в фигурный паз 20 диска 19. В это время осевая линия одной из рук 2 и ось цилиндрической поверхности захватной части паза 20 диска 19 совмещены с вертикальной плос- костью, проходящей через оси валов и 21. Пружинные пластины 4 рук 2 находятся в разжатом состоянии. Плечо рычага 14 расположено на максимальном радиусе Архимедовой спирали копира 15. Плечо рычага 12 сжима0
5
0
ет пружину 13. Ползун 5 находится в крайнем левом положении. Ролики 7 свободно установлены на пружинных пластинах 4.
При включении пресса на автоматический режим работы ползун 34, совершая возвратно-поступательное перемещение, приводит в движение храповые механизмы. Одна из шестерен 26 приводится в движение от ползуна 34 пресса и передает вращение шестерен 27 и через звенья рычажных механизмов 28 и 29 - корпусам 30 и 31.
-Вместе с корпусами 30 и 31 перемещаются закрепленные на них собачки 32 и 33, которые захватывают и вращают храповые колеса 24 и 25. Происходит синхронное вращение вала 21 с диском 19 и вала 1. При вращении диска 19, заготовка 23 перемещается последним к месту сегментного среза. Так как высота поворотного диска 19 выполнена меньше высо5 ты заготовки 23, а расстояние между диском 19 и крышкой 17 - равным или меньшим высоты заготовки, то диск 19 захватывает одну заготовку и свободно перемещает ее в зону захвата. В месте сегментного среза часть заготовки 23, находясь между крышкой 17 и основанием 16, выглядывает из механизма поштучной выдачи заготовок.
В момент совмещения осевой линии руки 2 и оси цилиндрической поверхности захватной части паза 20 диска 19 с вертикальной плоскостью, проходящей через оси валов 1 и 21, происходит перемещение ползушки плеча 14 с максимального радиуса Архимедовой спирали копира 15 на минимальный радиус этого копира. Треплечий рычаг 10 поворачивается вокруг оси
с 9. Плечо 12 при этом перемещается против часовой стрелки. Пружина 13 разжимается. Усилие разжатия пружины 13 передается на плечо 11, которое, воздействуя на стенки паза 8, перемещает ползун 5 по направляющему пазу 6 вправо. Ролики 7 ползуна 5, перекатываясь по наружной поверхности пластин 4 и накатываясь на выгнутую их часть, смыкают
, пластины 4, между которыми расположена заготовка 23.
Ползун 34 пресса, совершая обратный ход, приводит в движение храповые механизмы. При вращении храпо0
5
0
0
вых колес 24 и 25 поворачиваются корпуса 30 и 31, захватывая собачками 32 и 33 за следующий паз храповых колес 24 и 25. При следующем рабочем ходе ползуна 34 собачки 32 и 33, (вращая храповые колеса 24 и 25, перемещают заготовку 23 в рабочую зону пресса. Б конце его хода происходит вырубка детали, которая удаляется из матрицы рукой другого механизма (не показано). Одновременно с этим вторая рука производит захват заготовки из механизма поштучной выдачи заготовок, а третья - освобождает из захвата отход.
Формула изобретения
и посредством реечной передачи - с приводным элементом, механизм поштучной выдачи выполнен в виде установленного на валу неподвижного основания с пазом для выдачи заготовок, диска с фигурными захватными вырезами,имеющими цилиндрическую часть, жестко установленного на валу с воз- Ю можностью вращения относительно неподвижного основания, крышки со сквозным отверстием для прохода заготовок в паз для выдачи неподвижного основания и с сегментным срезом, вы- 15 полненным в плоскости захвата механической руки, при магазин со стопой заготовок установлен на крышке соосно с ее сквозным отверстием и цилиндрической частью фигурных за- 20 хватных вырезов диска.
40
01
CZ
91
Z806ЈSl
Фиг. 5
| Автооператор | 1978 |
|
SU779011A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
