13
Изобретение относится к ручным управляющим устройствамд используемьгм в системах управления,
Целью изобретения является уменьшение габаритов и упрощение конструк- ции устройства.
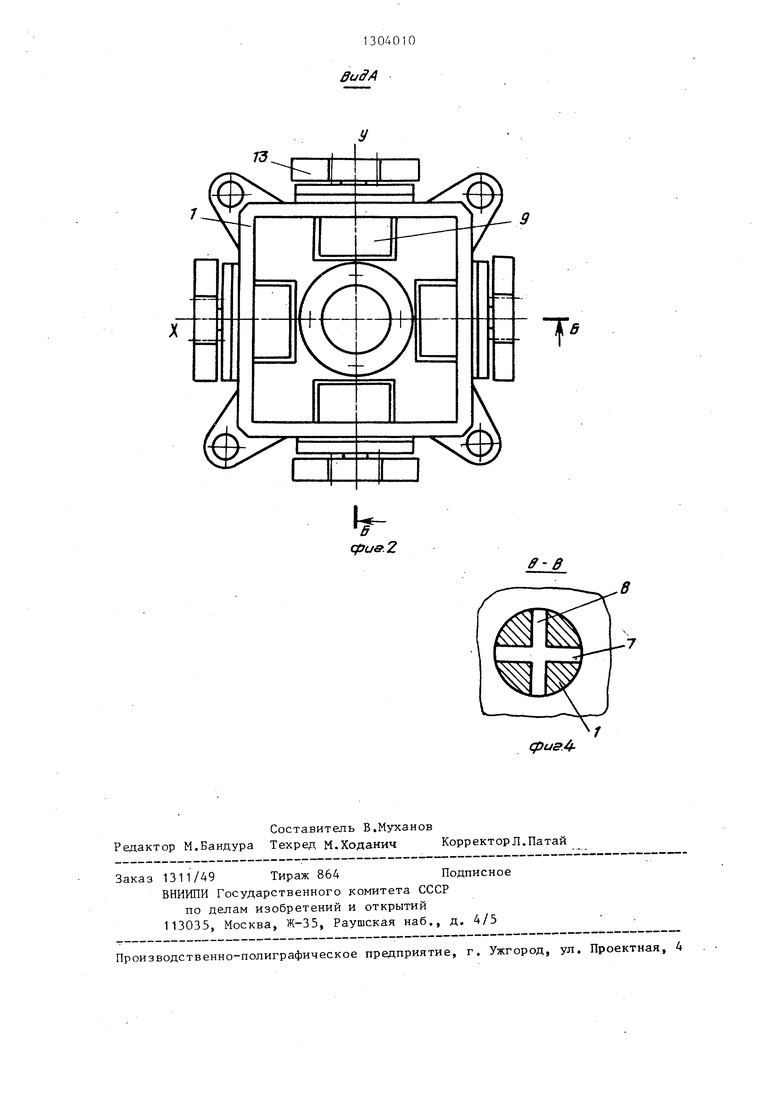
На фиг, 1 показано устройство общий вид на фиг. 2 - вид Л на фиг.1; на фиг. 3 - разрез Б-Б-на фиг, 2; на фиг. 4 - сечение В-В на фиг. 3,
Устройство для ручного дистанционного управления содержит рукоятку 1 управления, сопряженную с двумя размещенными в корпусе 2 коаксиальными кольцами 3, 4 на взаимно перпен- дикулярных осях 5, 6 качания С помощью двух взаимно перпендикулярных пазов 7, 8j датчики 9 угла отклонения рукоятки 1,
Устройство снабжено тормозным элементом 10, взаимно перпендикулярные пазы 7, 8 выполнены в рукоятке 1 управления, сопряженной с внутренней шаровой поверхностью 11 тормозного элемента 10, подпружиненного к корпусу 2.
Тормозной элемент 10 поджат ной 12. Оси 5-и 6 связаны с датчиками 9 с помощью зубчатых редукторов 13
Устройство работает следующими образом.
При перемещении рукоятки 1 управления по оси координат У усилие перемещения через паз 7 рукоятки 1 уп
«
0
.5
0
5
0
5
102
равления передается кольцу 3, которое поворачивает оси 5 и через зубчатые редукторы 13 - датчики 9, размещенные на оси координат X.
Для управления движением объекта в нужном направлении необходимое при перемещении рукоятки 1 в плоскости оси координат X усилие перемещения через паз 8 рукоятки 1 передается кольцу 4, от которого срабатьшают датчики 9, размещенные по оси координат У.
Тормозной элемент 10 обеспечивает фиксаисию рукоятки 1 в промежуточных положениях за счет трения ее о поверхность.
Формула изобретения
Устройство для ручного дистанционного управления,, содержащее рукоятку управления, сопряженную с двумя размещенными в корпусе коаксиальными кольцами на взаимно перпендикулярных осях качания с помощью двух взаимно перпендикулярных пазов, датчики угла отклонения рукоятгси, отличающееся тем, что, с целью уменьшения габаритов и упрощения конструкции, оно снабжено тормозным элементом, взаимно перпендикулярные пазы выполнены в рукоятке управления, сопряженной с внутренней шаровой поверхностью тормозного элемента, подпружиненного к корпусу.
гз
BcjffA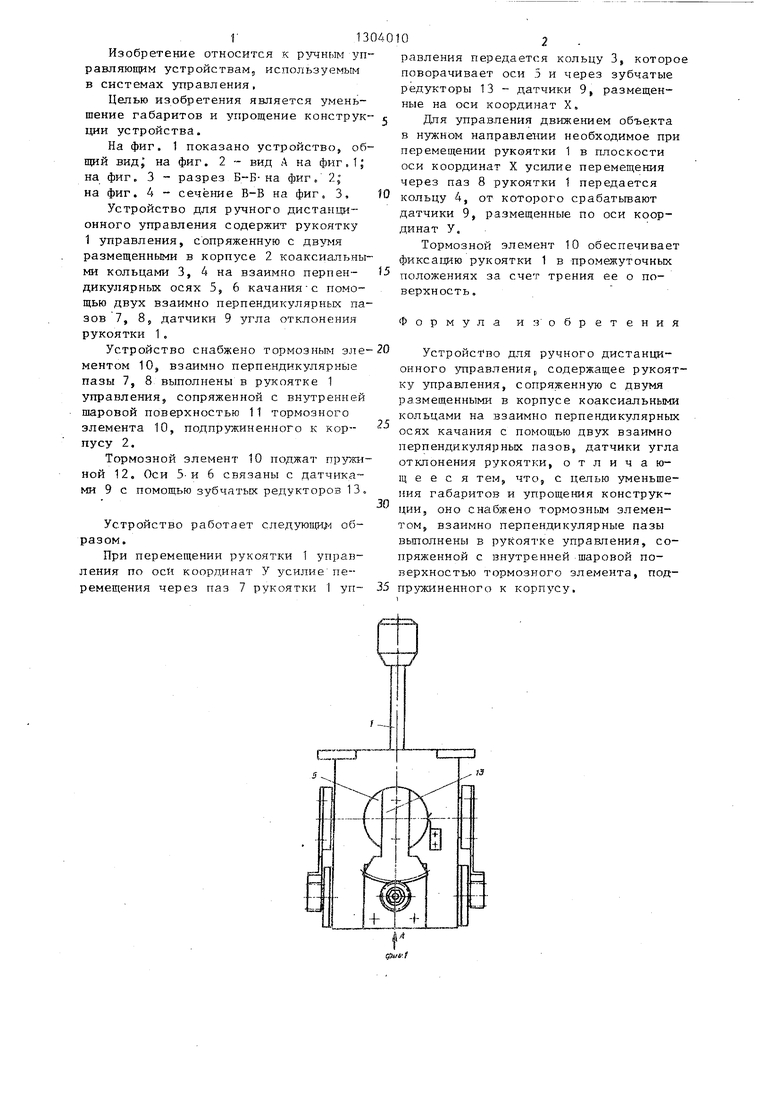
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство ввода команд для системы управления экскаватором | 2023 |
|
RU2809499C1 |
| БОКОВАЯ РУКОЯТКА УПРАВЛЕНИЯ | 1991 |
|
RU2018458C1 |
| ШАРОВОЙ КРАН ВОЗДУШНОЙ МАГИСТРАЛИ ПОДВИЖНОГО СОСТАВА | 2006 |
|
RU2325292C2 |
| Устройство для ввода информации | 1979 |
|
SU809252A1 |
| РАЗОБЩИТЕЛЬНЫЙ КРАН ВОЗДУШНОЙ МАГИСТРАЛИ ПОДВИЖНОГО СОСТАВА И ЗАПОРНЫЙ УЗЕЛ (ВАРИАНТЫ) | 2006 |
|
RU2352483C2 |
| ЗАПОРНЫЙ УЗЕЛ РАЗОБЩИТЕЛЬНОГО КРАНА ВОЗДУШНОЙ МАГИСТРАЛИ ПОДВИЖНОГО СОСТАВА (ВАРИАНТЫ) | 2006 |
|
RU2400382C2 |
| Устройство ручного управления | 1980 |
|
SU955002A1 |
| Устройство управления приводом сельскохозяйственной машины | 1990 |
|
SU1797779A1 |
| УСТРОЙСТВО РУЧНОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2016 |
|
RU2652284C1 |
| ЗАДАЮЩЕЕ УСТРОЙСТВО МАНИПУЛЯТОРА | 2002 |
|
RU2226149C2 |
Изобретение относится к ручным управляющим устройствам, используемым в системах управления. Цель изобретения - уменьшение габаритов и упрощение конструкции устройства. Устройство для ручного дистанционного управления содержит рукоятку 1 управления, корпус 2, коаксиальные кольца 3, 4, на взаимно перпендикулярных осях 5, 6, сопряженные с рукояткой 1 с помощью взаимно перпендикулярных пазов (ВПП), датчики 9. Уменьшение габаритов и упрощение конструкции обеспечивается тем, что устройство снабжено тормозным элементом (ТЭ) 10. ВПП выполнены в рукоятке 1 управления, сопряженной с внутренней шаровой поверхностью ТЭ 10, подпружиненного к корпусу 2. 4 ил.о ff-f повернуто (Л с
:: т
cfju&.2
ff- В
Составитель В.Муханов Редактор М.Бандура Техред М.ХоданичКорректорЛ Патай
Заказ 1311/49Тираж 864Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д, 4/5
Пр он 3 воде т в енн о
-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
(puff.4
| Механизм управления перемещением курсора | 1978 |
|
SU729583A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Механизм управления насосом | 1972 |
|
SU471580A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
