(5) УСТРОЙСТВО РУЧНОГО УПРАВЛЕНИЯ

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СБОРКИ ДВУХРЯДНЫХ СФЕРИЧЕСКИХ ШАРИКОПОДШИПНИКОВ С ЛЕПЕСТКОВЫМИ СЕПАРАТОРАМИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2097615C1 |
| Устройство для формования изделий "мюзле | 1977 |
|
SU751485A1 |
| Устройство для электродуговой сварки с колебаниями электрода | 1987 |
|
SU1418014A1 |
| УСТРОЙСТВО РУЧНОГО УПРАВЛЕНИЯ | 2003 |
|
RU2260834C2 |
| Мельница | 1991 |
|
SU1793968A3 |
| Устройство ввода команд для системы управления экскаватором | 2023 |
|
RU2809499C1 |
| Стенд для диагностики рулевых приводов транспортных средств | 1989 |
|
SU1651133A1 |
| 3D-ПРИНТЕР | 2019 |
|
RU2698353C1 |
| СТАНОК ДЛЯ СБОРКИ ТЕПЛОВЫДЕЛЯЮЩИХ ЭЛЕМЕНТОВ В ТЕПЛОВЫДЕЛЯЮЩИЕ СБОРКИ | 1992 |
|
RU2065350C1 |
| Автомат для заливки парафиновых колец | 1978 |
|
SU775202A1 |
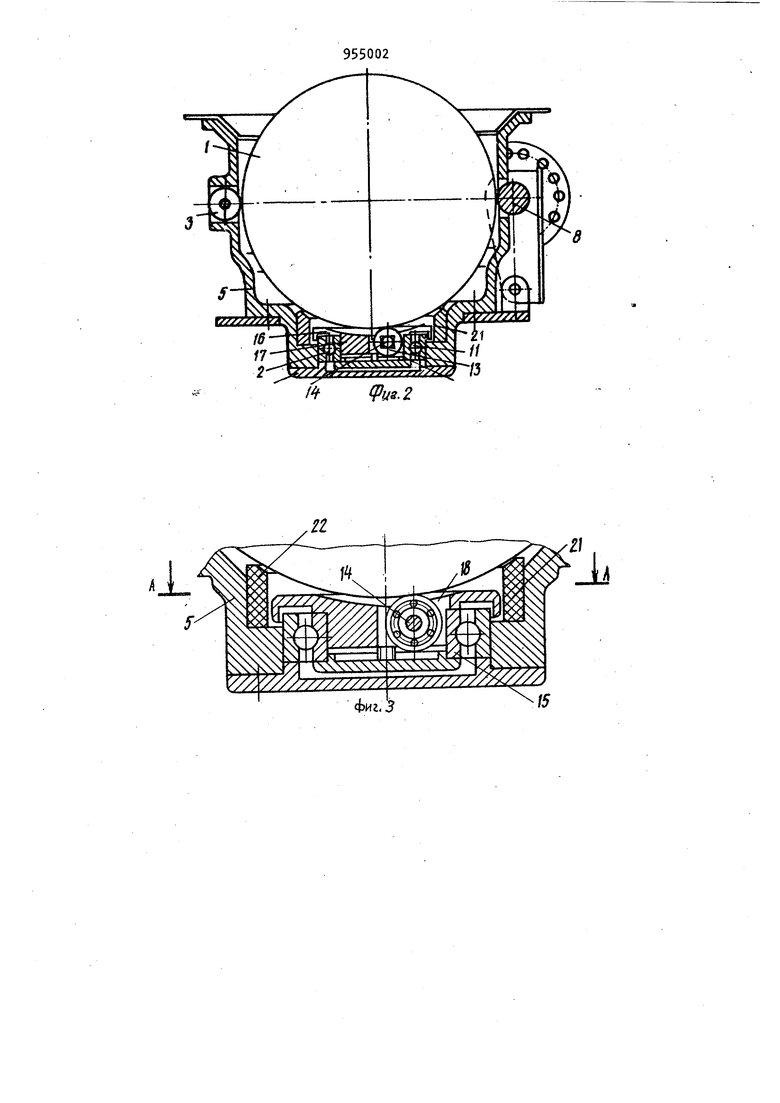

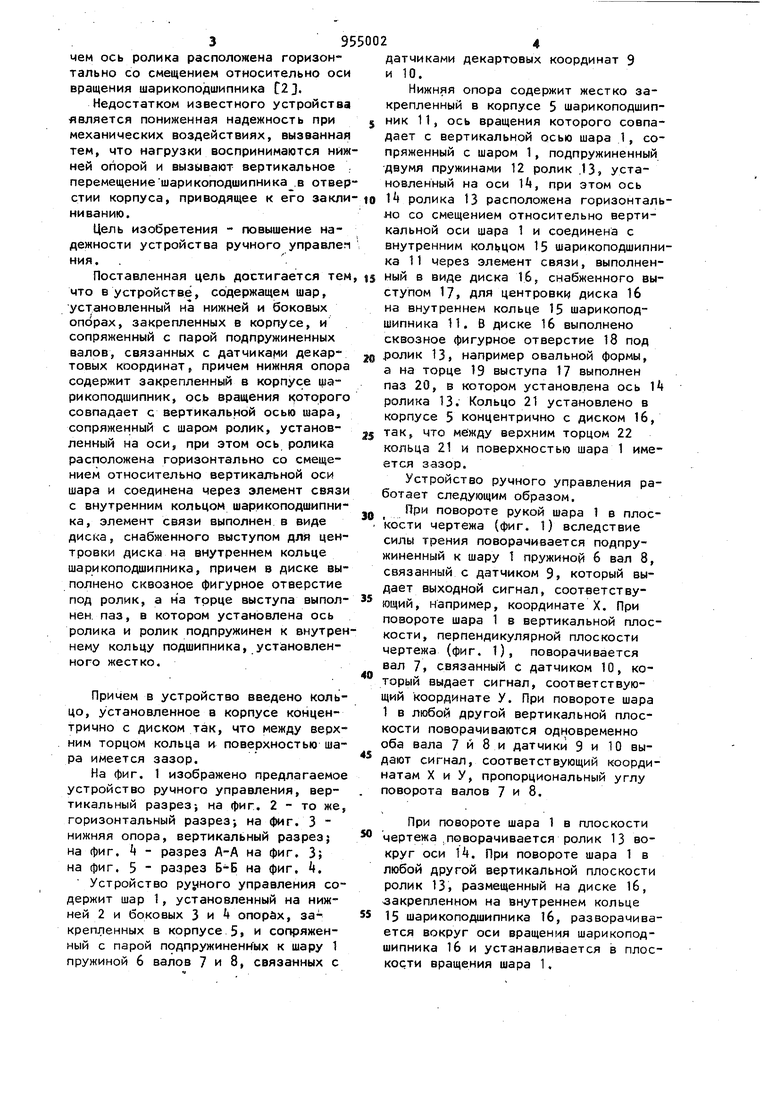
Изобретение относится к радиотехнике, а именно к устройствам для ручного управления перемещением светяитейся точки на экране электроннолучевой трубкиJ Известно устройство ручного управ ления, содержащее шар, установленный по нижней и двух боковых опорах, закрепленных в корпусе, и взаимодействующий с парой подпружиненных валов, связанных с датчиками декартовых координат 1, Недостатками данного устройства являются относительно большие габариты и пониженная надежность при механических воздействиях (вибрации и ударах). Относительно большие габариты уст ройства вызваны тем, что в нижней опоре использованы два шарикоподшипника и ролик помещен над шарикоподшипниками, а пониженная надежность при механических воздействиях обусловлена тем, что динамические нагруз ки воспринимаются непосредственно роликом и шарикоподшипниками, что может привести к их разрушению. Известно также устройство ручного управления, содержацее шар, установленный на нижней и подпружиненной боковой опоре и сопряженный с парой валов, связанных с датчиками декартовых координат. Нижняя опора шара Содержит шарикоподшипник, ось вращения которого совпадает с вертикальной осью шара, и установленного в корпусе с возможностью вертикального перемещения, плоской пружины, укрепленной на корпусе и поджимающей шарикоподшипник к корпусу посредством буртика, которым снабжена наружная обойма шарикоподшипника, держателя в форме диска, закрепленного на внутренней обойме шарикоподшипника и снабженного пазом, в котором помещен ролик, взаимодействую1ций с шаром, а ролик установлен на оси, жестко закрепленной в держателе, причем ось ролика расположена горизонтально со смещением относительно оси вращения шарикоподшипника 2 Д. Недостатком известного устройства является пониженная надежность при механических воздействиях, вызванная тем, что нагрузки воспринимаются ниж ней опорой и вызывают вертикальное : перемещениешарикоподшипника ,в отвер стии корпуса, приводящее к его закли ниванию. Цель изобретения - повышение надежности устройства ручного управлеп ния. Поставленная цель достигается тем что в устройстве, содержащем шар, установленный на нижней и боковых опорах, закрепленных в корпусе, и сопряженный с парой подпружиненных валов, связанных с датчиками декартовых координат, причем нижняя опора содержит закрепленный в корпусе шарикоподшипник, ось вращения которого совпадает с вертикальной осью шара, сопряженный с шаром ролик, установленный на оси, при этом ось ролика расположена горизонтально со смещением относительно вертикал-ьной оси шара и соединена через элемент связи с внутренним кольцом шарикоподшипника, элемент связи выполнен в виде диска, снабженного выступом для центровки диска на внутреннем кольце шарикоподшипника, причем в диске выполнено сквозное фигурное отверстие под ролик, а на торце выступа выполнен паз, в котором установлена ось ролика и ролик подпружинен к внутрен нему кольцу подшипника, установленного жестко. Причем в устройство введено кольцо, установленное в корпусе концентрично с диском так, что между верхним торцом кольца к поверхностью шара имеется зазор. На фиг. 1 изображено предлагаемое устройство ручного управления, вертикальный разрез-, на фиг. 2 - то же, горизонтальный разрез; на фиг. 3 нижняя опора, вертикальный разрез; на фиг. - разрез А-А на фиг, 3; на фиг. 5 - разрез Б-Б на фиг. k. Устройство рууного управления содержит шар 1, установленный на нижней 2 и боковых 3 и опорйх, закрепленных в корпусе 5 и сопряженный с парой подпружиненных к шару 1 пружиной 6 валов 7 и 8, связанных с датчиками декартовых координат 9 и 10. Нижняя опора содержит жестко закрепленный в корпусе 5 шарикоподшипник 11, ось вращения которого совпадает с вертикальной осью шара 1, сопряженный с шаром 1, подпружиненный двумя пружинами 12 ролик .13 установленный на оси И, при этом ось 1 ролика 13 расположена горизонтально со смещением относительно вертикальной оси шара 1 и соединена с внутренним кольцом 15 шарикоподшипника 11 через элемент связи, выполненный в виде диска 16, снабженного выступом 17, для центровки диска 16 на внутреннем кольце 15 шарикоподшипника 11. В диске 16 выполнено сквозное фигурное отверстие 18 под ролик 13, например овальной формы, а на торце 19 выступа 17 выполнен паз 20, в котором установлена ось 1 ролика 13. Кольцо 21 установлено в корпусе 5 концентрично с диском 16, так, что между верхним торцом 22 кольца 21 и поверхностью шара 1 имеется зазор. Устройство ручного управления работает следующим образом. При повороте рукой шара 1 в плоскости чертежа (фиг. 1) вследствие силы трения поворачивается подпружиненный к шару 1 пружиной 6 вал 8, связанный с датчиком 9, который выдает выходной сигнал, соответствующий, например, координате X. При повороте шара 1 в вертикальной плоскости, перпендикулярной плоскости чертежа (фиг. 1), поворачивается вал 7, связанный с датчиком 10, который выдает сигнал, соответствующий координате У. При повороте шара 1 в любой другой вертикальной плоскости поворачиваются одновременно оба вала 7 и 8 и датчики 9 и 10 выдают сигнал, соответствующий координатам X и У, пропорциональный углу поворота валов 7 и 8. При повороте шара 1 в плоскости чертежа .поворачивается ролик 13 вокруг оси Н. При повороте шара 1 в любой другой вертикальной плоскости ролик 13, размещенный на диске 16, .закрепленном на внутреннем кольце 15 шарикоподшипника 16, разворачивается вокруг оси вращения шарикоподшипника 1б и устанавливается в плоскости вращения шара 1. При повороте шара 1 оператором ось 1 ролика 13 с помощью пружин 12 постоянно поджата к верхней плоскости паза 20. При достижении некоторого значения силы, действующей на шар при механических воздействиях (вибрации и ударах), превышающей суммарное усилие пружин 12 шар 1 и взаимодействующий с ним ролик 13 с осью 1 перемещаются вни на величину зазора между верхним торцом 22 кольца 21 и поверхностью шара 1 до упора шара в торец 22 кол ца 21, при этом динамические усилия воспринимаются корпусом 5, а не ниж ней опорой, что препятствует возмож ному разрушению последней. Использование изобретения позволяет повысить надежность предлагаемого устройства, так как исключает возможность перемещения заклинивания подшипника. Формула изобретения 1. Устройство ручного управления содержащее шар, установленный на нижней и боковых опорах, закреплен ных в корпусе, и сопряженный с парой подпружиненных валов, связанных с датчиками декартовых координат, причем нижняя опора содержит 6 закрепленный в корпусе шарикоподшипник, ось вращения которого совпада- ет с вертикальной.осью шара, сопряженный с шаром ролик, установленный на оси, при этом ось ролика распоожена горизонтально, со смещением относительно вертикальной оси шара и соединена через элемент связи с внутренним кольцом шарикоподшипника, элемент связи выполнен в виде диска, снабженного выступом для центровки диска на внутреннем кольце шарикоподшипника, причем в диске выполнено сквозное фигурное отверстие под ролик, например, овальной формы, отличающееся тем, что, с целью повышения надежности , на торце выступа выполнен паз, в котором установлена ось ролика, подпружиненная к внутреннему кольцу жестко установленного подшипника. 2. Устройство по л. 1, отличающееся тем,что оно содержит кольцо, установленное в корпусе концентрично с диском, причем между верхним торцом кольца и поверхностью шара выполнен зазор. Источники информации, принятые во внимание при экспертизе 1.Патент США № 3395589, кл. , опублик. 1966. 2.Патент США ff 3987685, кл. , опублик, 197 (прототип)
