Предлагаемая система позволяет определять (предсказывать) предел, к которому стремится какой-либо физический процесс задолго до его окончания. Например, можно измерить при помош,и термопары погружения температуру расплавленного металла задолго до того, как происходит полный ее прогрев.
Система содержит датчик, линейно преобразующий изменения исследуемого физического процесса в изменения электрического напряжения. Определение (предсказывание) предела (асимптоты), к которому стремится исследуемый физический процесс до его окончания, осуществляется применением электронной модели функции, представляющей частное от деления зависимости исследуемого процесса от времени на уравнение асимптоты. Напряжение на входе модели, являющееся одним из параметров системы, поддерживается так, чтобы напряжение на ее выходе было равно (в выбранном ) напряжению на выходе датчика. Для управления моделью применен управ.ляющий блок, изменяющий какой-либо параметр модели, являющийся вторым параметром системы до тех, пор, пока он не будет соответствовать исследуемому физическому процессу.
Между моделью и управляющим блоком включены дифференцирующие блоки, служащие для определения несоответствия второго параметра системы исследуемому физическому процессу. Для задания программы операций регулирования второго параметра системы в ней применен коммутатор, регулирующий длительность замыкания и размыкания в зависимости от характеристик дифференциаторов и органа управления моделью.
130553- 2 -
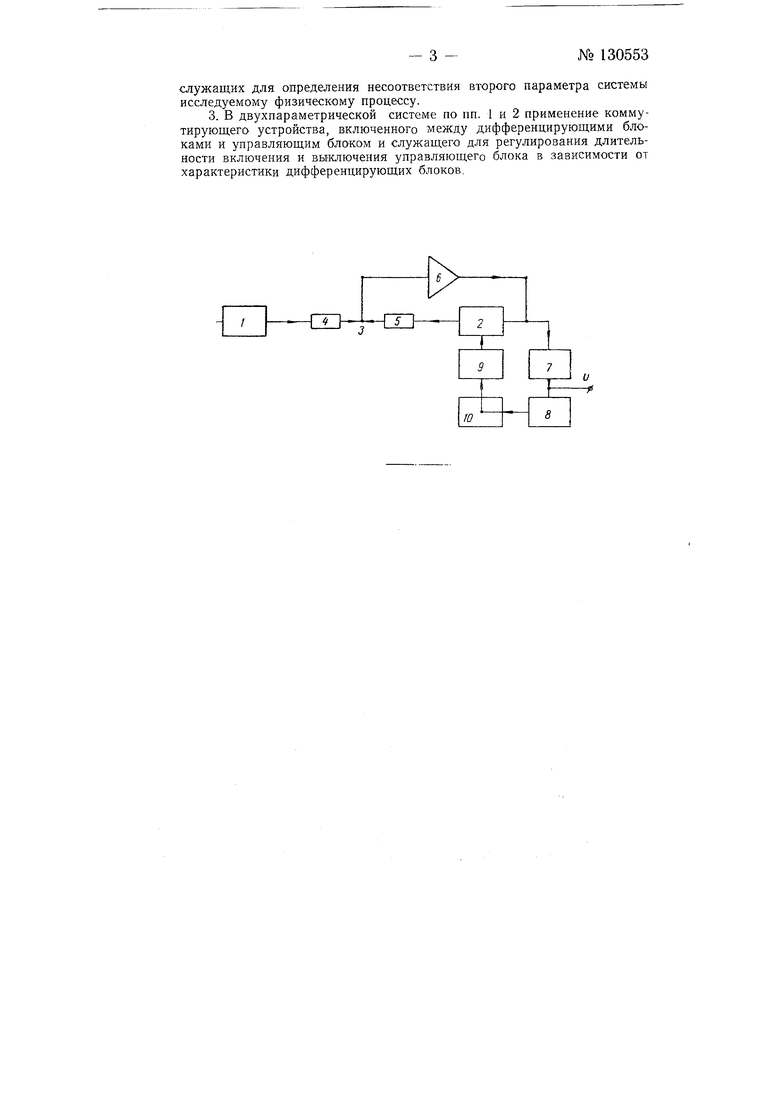
На чертеже изображена блок-схема следящей системы, где цифрой / обозначен линейный преобразователь исследуемой неэлектрической величины в уровни электрического напряжения.
Блок 2 представляет собой электродинамическую регулируемую модель функции J {В, 1). Дифференциальная схема сравнения 3 состоит из двух постоянных сопротивлений 4 и 5, от которых зависит масштаб получаемого решения. К средней точке дифференциальной схемы присоединен вход усилителя постоянного тока 6, устанавлиБаюш,ий переменный уровень напряжения на модели, соответствующий искомой асимптоте, если только параметр В модели соответствует исследуемому процессу. В этом случае на выходе дифференциатора 7 будет постоянное напряжение, в заданном масштабе представляющее наклон искомой асимптоты Y (Л, В).
Если же окажется, что второй параметр не соответствует физическому процессу, то на выходе дифференциатора 7 напряжение будет изменяться во времени и на выходе дифференциатора 8 напряжение не будет равно нулю. Тогда блок 9 управления моделью подаст команду на изменение параметра В, которая будет существовать до тех пор, пока не установится искомое соответствие.
Для задания программы операций регулирования второго параметра системы в ней применен коммутатор 10.
Таким образом, изменение второго параметра (В) доллсно происходить ступенями, в перерывах между которыми производится проверка величины второй производной и задается уровень сигнала для следующей ступени регулирования.
От скорости протекания физического процесса зависит конструкция коммутатора. Для медленных процессов, протекающих в течение нескольких секунд, можно применять механические коммутирующие устройства. Для быстропротекающих процессов следует применять малоинерционные электронные коммутаторы. Относительная продолжительность замыкания и размыкания выбираться в зависимости от свойств блока 9 и временных характеристик дифференциаторов.
После того как система настроилась, напряжение U на выходе дифференциатора 7 становится постоянным - оно в некотором масштабе выражает наклон асимптоты.
Предмет изобретения
1.Электронная самонастраивающаяся следящая двухпараметрическая система для исследования различного рода физических процессов, содержащая датчик, линейно преобразующий изменения исследуемого физического процесса в изменения электрического напряжения, отличающаяся тем, что, с целью определения (предсказывания) предела (асимптоты), к которо.му стремится исследуемый физический процесс до его окончания, в ней применена электронная модель функции, представляющей частное от деления зависимости исследуемого процесса от времени на уравнение асимптоты, напряжение на входе которой (модели), являющееся одним из параметров системы, поддерживается так, чтобы напряжение на ее выходе было равно (в выбранном масштабе) напряжению на выходе датчика, а для управления моделью применен управляющий блок, изменяющий какой-либо параметр модели, являющийся вторым параметром системы до тех пор, пока не будет соответствовать исследуемому физическому процессу.
2.В двухпараметрической системе по п. 1 применение дифференцирующих блоков, включенных между моделью и управляющим блоком и
служащих для определения несоответствия второго параметра системы исследуемому физическому процессу.
3. В двухпараметрической системе по пп. 1 и 2 применение коммутирующего устройства, включенного между дифференцирующими блоками и управляющим блоком и служащего для регулирования длительности включения и выключения управляющего блока в зависимости от характеристики дифференцирующих блоков.
| название | год | авторы | номер документа |
|---|---|---|---|
| Двумерная самонастраивающаяся следящая система для автоматического определения коэффициентов дифференциального уравнения | 1960 |
|
SU146975A1 |
| Электронная двухпараметрическая следящая система | 1961 |
|
SU146376A1 |
| Устройство для решения дифференциальных уравнений | 1979 |
|
SU911562A1 |
| Следящая система для исследования физических процессов | 1974 |
|
SU486302A1 |
| Прибор для измерения статических поверхностных напряжений в стали | 1950 |
|
SU95201A1 |
| Самонастраивающаяся система | 1978 |
|
SU744443A1 |
| РН-метр | 1980 |
|
SU918839A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И ЭКСПЕРТНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2078324C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО КОНТРОЛЯ СРАБАТЫВАНИЯ ДВУХОБМОТОЧНОГО ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1987 |
|
SU1840227A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА РЕАКТИВНОЙ ГИДРАВЛИЧЕСКОЙ ТУРБИНЫ И ПИД-РЕГУЛЯТОР ЧАСТОТЫ ВРАЩЕНИЯ СИЛЬНОГО ДЕЙСТВИЯ | 2021 |
|
RU2781087C1 |