(Б ) УСТРОЙСТВО ДЛЯ РЕШЕНИЯ ДИФФЕРЕНЦИАЛЬНЫХ
I
Изобретение относится к аналоговой вычислительной технике и может быть использовано для косвенного измерения входного сигнала, воздействующего на объект, и его параметров по информации выходного сигнала.
Известно устройство, обеспечиваю-; щее определение двух параметров и входного сигнала по значениям выход-, ного сигнала преобразователя при yc-i ловии, что в определенном промежутке времени, в течение которого производится обработка выходного сигнала, входной сигнал постоянен или изменяется по линейному закону, т.е. входной сигнал апроксимируется полиномом нулевого или первого порядка.
Определение входного сигнала осуществляется параллельно с определением двух параметров объекта при помощи известной двухпараметрической самонастраивающейся следящей системы, в которой поиск параметров осуществляется по производной непрерывУРАВНЕНИЙ
но формируемого первого параметра, сопровождаемого подстройкой второго параметра. Подстройка второго параметра прекращается при равенстве производной первого параметра нулю. При этом выходные сигналы, указывающие на значения пвраметров, рказываются достоверными 11.Однако известное устройство в целом не обеспечивает определение двух
10 параметров и, следовательно, входного сигнала при изменении последнего так, чтобы он апроксимировался полиномом второго или более высокого порядка.
15
Наиболее близким по технической сущности к предлагаемому является устройство,содержащее ключ, блок управления ключом, блок вычисления производных, блок определения коэф20фициентов, блоки умножения и сумматор 21Однако недостатком известного, устройства является то, что время на39
стройки используемой двухпараметрической самонастраивающейся системы и время, в течение которого изменение входного сигнала можно принять линейным, могут оказаться одного порядка. При таком условии определение коэффициентов не может быть осуществлено с точностью, обусловленной элементами обработки сигналов.
Кроме того, сам входной сигнал может применяться так, что он может апроксимироваться полиномом второго, третьего и т.д. порядка.
Цель изобретения - повышение точности и быстродействия при определении коэффициентов и входного сигнала.
Поставленная цель достигается тем что 8 устройство, содержащее ключ, первый вход которого является входом устройства, выход ключа соединен с первым входом сумматора и со входом блока вычисления производных, первый и второй выходы которого подключены соответственно к первым входам первого и второго блоков умножения, выходы которых соединены соответственно со вторым и третьим входами сумматора, выход которого является выходом устройства, третий, четвертый и пятый выходы блока вычисления производной, подключены соответственно к первому, второму и третьему входам блока определения коэффициентов, первый и второй выходы которого соединены соответственно со вторыкм входами первого и второго блока умножения, введен генератор тактовых сигналов, выход которого подключен ко второму бходу ключа, а блок определения коэффициентов содержит три блока деления, два блока дифференц |рования, блок умножений и сумматор, причем первые входы первог и второго блоков деления являются соответственно первым и третьим входом блока определения коэффициентов, вторым входом которого являются вторые входы первого и второго блоков деления, выходы которых соединены соответственно со входамипервого и вт рого блоков дифференцирования, выход Первого блока деления подключен к первому входу сумматора, выход которого является первым выходом блока определения коэффициентов, выход второго блока деления подключен к первому входу блока умножения, выходы первого и второго блоков дифферен15624
цирования соединены соответственно с первым и вторым входом третьего блока деления, выход которого является вторым выходом блока определения KQ5 эффициентов и подключен ко второму входу блока умножения, выход которого подключен ко второму входу сумматора.
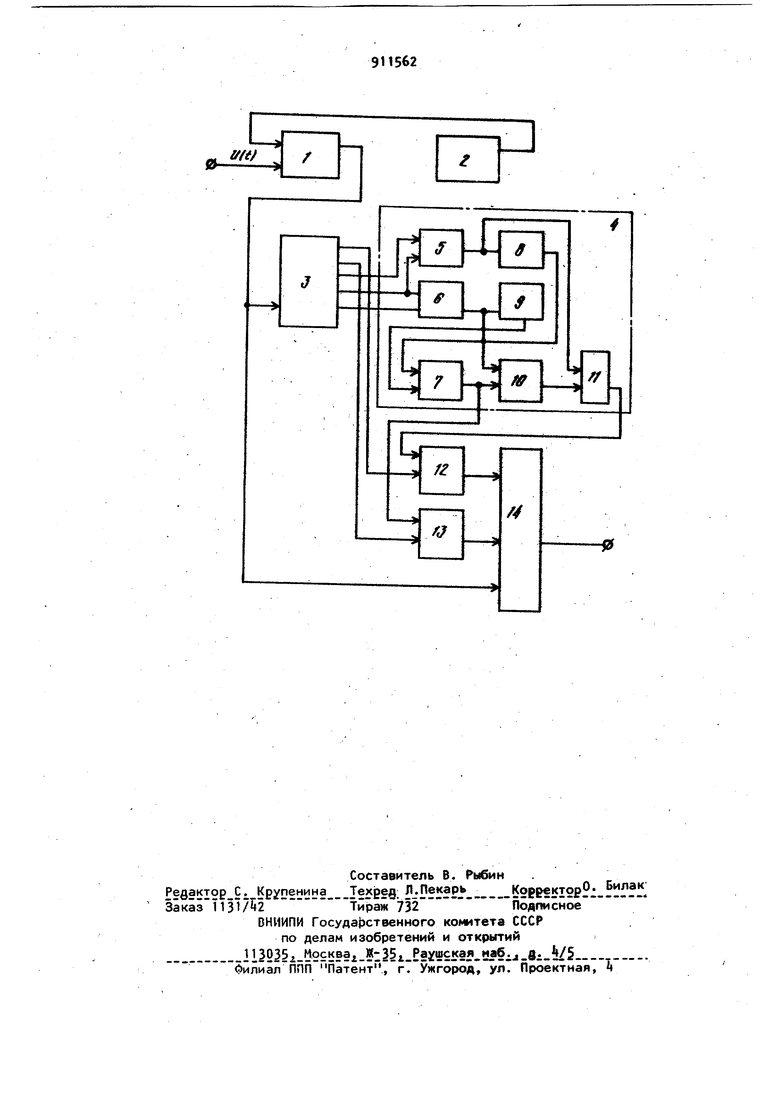
На чертеже представлено предлага«0 емое устройство.
Устройство содержит ключ 1, генератор 2 тактовых сигналов, блок 3 вычисления производных, блок k определения коэффициентов уравнения, котоt5 рый содержит блоки 5-7 деления, блоки 8 и 9 дифференцирования, блок 10 умножения, сумматор 11, кроме того, устройство содержит блоки 12 и 13 умножения и сумматор 1.
20 Устройство работает следующим об- разом.
На вход устройства подается выходной сигнал объекта U{t). Пусть сигнал U(t) изменяется в виде некоторой
25 сложной функции времени и параметров Т и t.
Представим, что U{t) является решением некоторого неоднородного линейного дифференциального уравнения
30 с постоянными коэффициентами Т,, Tij,..., J, являющимися параметрами объекта или измерительного преобразователя.
Пусть это уравнение второго порядкэ
)4. T,) -bU(t) x(t), (1) где x(t) - входной сигнал объекта.
Выходной сигнал U(t) задан, следовательно, из поступающих значений
4(, U(t) в течение промежутка времени квантования, обеспечиваемого ключом 1 управляемым генератором 2, имеем заданными значения U(t).
Наряду с основным уравнением смотрим уравнение
) T,)+ ) х) Q
Если считать, что выходной сигнал U(t) в промежутке времени л t апроксимируется полиномом второго или дате третьего порядка, то при определении параметров и входного сигнала будет произведена ошибка. Уравнение (2) не выполняется.
Кроме того, двухпараметрическая самонастраивающаяся следящая система требуе/ времени настройки подстраиваемого параметра, а промежуток ере5мени квантования может оказаться не всегда нужного значения. Представим, что функция x(t) входной сигнал апроксимируется полиномом третьего порядка. Тогда имеем из уравнения (О ) T,)(t) о Из уравнения (З) имеем -Т-ТЙ) ) )-ut4t) (5) l7%))r т-- )ljL dl4ot5)jJ4t Г - I . . -I ь ) J Откуда определение Тj и Ti произ водится по формулам 16) иf) соответственно при заданных 1г (t), и ). Для формирования Т. не требуется время поиска. Они определяют ся непрерывно в реальном масштабе времени, i Выходной сигнал U(t), поступая в течение времени дt на вход блока3 вычисления производных, обеспечивает на выходе производные U(t) до шестого порядка включительно, т.е. ... Ull(t); ); ); (t); At); Л). Так как четвертая и пятая производные ) и ) поступают на первый блок 5 деления, а шестая и пята(я производные 1 (t) и t/°(t) поступают на второй блок 6 деления, то на выходах каждого имеем электрические сигналыАЛ, ,ы .U5{t)):l/5(t); Ufc(t)(t) Сигналы Ujlt) и U(,(t) поступают |На дифференциаторы 8 и 9 соответст%енно, в результате на выходах их имеем (t)... (. А (t ft 1ЩТ)-3 Ж11К§Г Ue(t) Блок 7 деления осу1чествляет деле ние U(t) на i(t). В результате на выходе третьего блока 7 деления с учетом изменения знака частного от деления, исходя и формулы (6), сигнал, соответствующи коэффициенту UT(t)-(Ue(t) :lJ9(t)} T 26 Так как результат второго блока 6 еления ) умножается на Ti в блоке 10 произведения, имеем Ца) Г Результат Ug(t) с выхода первого блока 5 деления суммируется с выходным сигналом (t) с выхода блока 10 произведения в сумматоре 11, на выходе которого имеем м П т иЦр ) ч uisnr ДЩТТ Согласно формуле С) U(t) есть U(t) -Т. Таким о{5разом с выхода третьего блока 7 делейия и сумматора 11 получаем сигналы T/i и Т , кото| ые однозначно определяют коэффициенты уравнения объекта или erj параметры. Сигналы 1Г (t) и U (t) с выхода блока вычисления производных и сигналы Т и Trj с выхода блока k определения коэгйициентов соответственно попарно подаются на блоки 12 и 13 умножения,с выходов которых подаются на входы сумматора , на вход которого подается входной сигнал U{t). На выходе сумматора имеем Tnl/ t)4T,u(t) + U(t) Z(t), соответствующии искомому входному сигналу x(t) в течение промежутка времени квантования & t. Предлагаемое устройство по сравнению с известным проводит определение коэффициентов уравнения по значениям величин выходного сигнала за очень короткий промекуток времени. Быстродействие предлагаемого устройства поаволйетг решить задачу, определения коэффициентов и входного сигнала, когда последний изменяется линейно в очень небольшом промежутке времени. Кроме того, если в квантованном промежутке времени, в течение которого задается выходной сигнал объекта, входаой сигнал не изменяется линейно, то задача решается известнын устройством ие точно и получаемые коэффициенты и входной сигнал содержат значительные погрешности, которые тем выще, чем больше отличается входной сигнал от | 1нейности. Предлагаемое устройство полностью исключает эти погрешности и фактически раиает задачи при любом изг4енении входного сигнала в течение времени At - Т1ромежутка квантования, включая условие, что входной сигнал
апроксимируется временным полиномом третьего и более порядка. Здесь однако надо отметить, что все упирается в блок определения производных, порядок которого определяется , где п - порядок дифференциального
уравнения объекта; k - максимальный порядок полинома, который апроксимирует входной сигнал.
Устройство применяется в автоматике при определении параметров объекта с целью возможности оптимального регулирования последнего. Определение параметров объекта с высокой точностью позволяет проводить задачу управления качеством продукций с высокой точностью и, следовательно, улучшить качество выпускаемой продукции .
Формула изобретения
Устройство для решения дифференциальных уравнений, содерхгащее ключ, первый вход которого является входом устройства, выход ключа соединен с первым входом сумматора и со входом блока вычисления производных, первый и второй выходы которого подключены соответственно к первым входам первого и второго блоков умножения, выходы которых соединены соответственно со вторым и третьим входами сумматора, выход которого является выходом устройства, третий, четвертый и пятый выходы блока вычисления производной подключены соответственно к первому,второму и третьему входам блока определения коэффициентов, первый и второй выходы
которого соединены соответственно со вторыми входами первого и второго блока умножения, отличающеес я Т6М« что. С целью повышения точности и быстродействия, в него введен генератор тактовых сигналов, выход которого подключен ко второму . входу ключа, а блок определения коэффициентов содержит три блока деления, два блока дифференцирования, блок умножения и сумматор, причем первые входы первого и второго блоков деления являются соответственно первым и третьим входом блока опреде5 пения коэффициентов, вторым входом которого являются вторые входы первого и второго блоков деления, выходы которых соединены соответственно со входами первого и второго блоков
0 дифференцирования, выход первого блока деления подключен к первому.входу сумматора, выход которого является первым выходом блока определения коэффициентов, выход второго блока деления подключен к первому входу блока умножения, выходы первого и второго блоков дифференцирования соединены соответственно с первым и вторым входом третьего блока деления,
которого является вторым выходом блока определения коэффициентов и подключен ко второму входу блока умноже-, ния, выход которого подключен .ко второму входу сумматора.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельств СССР W. , кл. G 06 G 7/38, 1962. 2. Авторское свидетельство СССР № 498628, кл. .G 06 G 7/38, 1972 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивное корректирующее устройство | 1977 |
|
SU847274A1 |
| Цифровой корректор статической и динамической характеристик инерционного измерительного преобразователя | 1980 |
|
SU954930A1 |
| Устройство для измерения температуры | 1978 |
|
SU781605A1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 2016 |
|
RU2616219C1 |
| Устройство для решения дифференциальных уравнений | 1974 |
|
SU498628A1 |
| Дискретная самонастраивающаяся система | 1979 |
|
SU824139A1 |
| РН-метр | 1980 |
|
SU918839A1 |
| ДИСКРЕТНАЯ СИСТЕМА ОЦЕНИВАНИЯ | 2007 |
|
RU2398258C2 |
| Нелинейное корректирующее устройство | 1990 |
|
SU1755255A1 |
| Система идентификации параметров | 1990 |
|
SU1837260A1 |