Изобретение относится к системам управления в машиностроении.
Цель изобретения - упрощение при-i вода и повьшение единичной мощности на выходном валу агрегата и повышение надежности в работе.
На фиг.1 представлена принципиальная схема шагового привода с одноэлементным ротором; на фиг.2 - двухрядное исттолнение привода.
Шаговый привод (фиг,1) содержит корпус 1, статор 2, соединенный с корпусом 1 посредством скользящей
крестовины 3 (или иного элемента типа 15 вала или иного подобного, связываю- кардан-вала), ротор-вал 4, находящий- этот элемент через диск 5 с кор- ся в кинематическом внутреннем зубча- „усом 1 и обеспечивающим ему необхоTOBi На такой угловой шаг изменяется направление линии центров элементов 2 и 4 зацепления. При дальнейшем вкл чении и выключении электромагнитов 7-1, 7-2,...,7-16 в такой последовательности ось кинематического элемен та 2 статора смешается в колебательном цикле эквидистантно оси ротора по круговой траектории с диаметром, равным двумя эксцентриситетам без вращения элемента 2 статора вокруг своей оси, от которого он удерживает ся конструктивным элементом 3 в виде скользящей крестовины или кардан20
том, фрикционном или ином подобном внутреннем зацеплении со статором 2, диски статора 5, подшипниковые опоры 6, радиально расположенные элементы управления - электромагниты 7, блок 8 управления, дешифратор 9 сигналов, счетчик 10, коммутатор 11, генератор
25
димую степень свободы в пределах кру гового колебательного движения с экс
12, исполнительные элементы (тиристоры) 13.
Диски 5 (фиг ,2) соединены коромыслами 14, опирающимися на перемычку 15. На роторе-валу 4 жестко закреплен диск 16 р
Привод работает следующим образом. Блок 8 управления в заданной взаимно согласованной последовательности выдает команду через дешифратор 9 на последовательно волновое включение и выключение через тиристоры 13 силовых электромагнитов 7, (фиг.1), где зафиксирован момент, когда включены электромагниты с порядковым номером
центриситетом . При одном круговом колебательном цикле кинематического элемента 2 статора все точки его окружности зацепления последовательно имеют контакт с точками окружности зацепления 7 диска 16, длина которой меньше длины окружности зацепления элемента 2, При условии зацепления элементов 2 и 16 без проскальзывания при одном круговом колебательном цик ле кинематического элемента 2 статор диски 16 ротора поворачиваются вокру своей оси на угол,соответствующий ду ге его окружности зацепления, равной разности длин окружностей зацепления 35 кинематическгос элементов 2 статора и ротора 4.
При описан:ной последовательности хзключения и выключения электромагнитов 7-1, 7-2,.. .,7-16 ротор-вал 4 вра
30
При описан:ной последовательности хзключения и выключения электромагнитов 7-1, 7-2,.. .,7-16 ротор-вал 4 вра7-15, 7-16, 7 1, 7-2, 7-3 при выклю Q щается вокруг своей оси в подшипнико- ченных остальных электромагнитах это- опорах 6 против часовой стрелки, го статора. Суммарным усилием вклю- дрц обратной последовательности включенных электромагнитов в этот момент ения и выключения электромагнитов кинематический элемент статора 2 сме- вращение :ротор-вагга, 4 осуществляет- щен по направлению вертикальной оси ся по часовой стрелке, до полного нормального зацепления с Дри переключении группы работающих ротором 4 (в случае зубчатого зацепле- электромагнитов на один шаг их углония, нормальное зацепление их обеспечивается onopo i втулок, дисков 5 статора на вал t.QTOpa) . В следующее за- Q данное по племени мгновение выключа- ется электромагнит 7-15 с одновременным включением электромагнита 7-4 и т.д. в такой последовательности. При этом направ.исние суммарного усилия j включенных электромагнитов всегда, пересекая оба диска ротора, отклоняется от вертикальной оси вправо на один .угловой шаг расположения электромагнивого расположения ротор-вал 4 поворачивается на угол
i Doi ,
04
где 1 - передаточное отношение эле-, ментов кинематической пары 2 статора и ротора 4 с диамет рами DPJ , D(,4 1
/i - уголовой шаг расположения электромах нитов.
вала или иного подобного, связываю- этот элемент через диск 5 с кор- „усом 1 и обеспечивающим ему необхоTOBi На такой угловой шаг изменяется направление линии центров элементов 2 и 4 зацепления. При дальнейшем включении и выключении электромагнитов 7-1, 7-2,...,7-16 в такой последовательности ось кинематического элемен та 2 статора смешается в колебательном цикле эквидистантно оси ротора по круговой траектории с диаметром, равным двумя эксцентриситетам без вращения элемента 2 статора вокруг своей оси, от которого он удерживается конструктивным элементом 3 в виде скользящей крестовины или кардан0
5
димую степень свободы в пределах кругового колебательного движения с эксцентриситетом . При одном круговом колебательном цикле кинематического элемента 2 статора все точки его окружности зацепления последовательно имеют контакт с точками окружности зацепления 7 диска 16, длина которой меньше длины окружности зацепления элемента 2, При условии зацепления элементов 2 и 16 без проскальзывания, при одном круговом колебательном цикле кинематического элемента 2 статора диски 16 ротора поворачиваются вокруг своей оси на угол,соответствующий дуге его окружности зацепления, равной разности длин окружностей зацепления 35 кинематическгос элементов 2 статора и ротора 4.
При описан:ной последовательности хзключения и выключения электромагнитов 7-1, 7-2,.. .,7-16 ротор-вал 4 вра30
Q щается вокруг своей оси в подшипнико- опорах 6 против часовой стрелки, дрц обратной последовательности вклю ения и выключения электромагнитов вращение :ротор-вагга, 4 осуществляет- ся по часовой стрелке, Дри переключении группы работающих электромагнитов на один шаг их углового расположения ротор-вал 4 поворачивается на угол
i Doi ,
04
1 - передаточное отношение эле-, ментов кинематической пары 2 статора и ротора 4 с диаметрами DPJ , D(,4 1
/i - уголовой шаг расположения электромах нитов.
31
Реальные конструктивные возможности позволяют выполнить подобные кинематические пары с передаточным отношением в пределах 1/6-1/300 при зубчатом зацеплении и до 1/1000 при фрикционном зацеплении.
Такие широкие возможности по диапазону значений передаточных отношений в кинематической паре позволяет иметь шаговые приводы с угловым ша- гом от нескольких градусов до долей секунды. Это значительно расширяет их технологические возможности для использования в кинематических схема различных видов оборудования с число вым программным управлением.
В целях разгрузки подшипниковых опор 6 от односторонних радиальных знакопеременных сил электромагнитов 7 и повышения единичной мощности в одном агрегате кинематическая и конструктивная схемы предлагаемого шагового привода допускает иметь его с двумя и более кинематическими- парами из унифицированных кинематических элементов 2,4,3,5 и 7 и других, работающих на один вал ротора, с соот ветствующим сочетанием включения и выключения электромагнитов 7 каждого ряда посредством одних и тех же тиристоров 13 (фиг.2). Например, в двухрядном исполнении шагового привода схема электропитания предусматривает одновременное включение и выключение электромагнитов 7 одного ряда и противоположно и симметрично расположенных электромагнитов 7 второго ряда. При этом в целях необходимой балансировки подвижных элементов 2 и 5 статора при работе шагового привода с горизонтальным расположением его вала они соединены коромыслами 14 (с шарнирно-сферическими опорами) , опирающимися на перемычку 15 корпуса.
Формула изобретения
1. Шаговый привод, содержащий корпус, кинематически связанньй с ним статор с элементами управления, ротор-вал, последовательно включенные генератор, коммутатор, счетчик и де
шифратор, выходы которого и выходы блока управления соединены через исполнительные элементы с элементами управления, отличающийся тем, что, с целью упрощения привода, в нем на роторе-валу жестко закреплен диск, связанный управляемым внутренним зацеплением со статором, ось ко- торого параллельна и эксцентрично смещена относительно оси ротора-вала, статор выполнен со степенью свободы. кругового колебательного движения относительно оси ротора-вала, а элементы управления расположены радиаль- но в плоскости статора,
2. Привод по п.1, отличающийся тем, что, с целью повьпие- ния единичной мощности и повышения надежности в работе, на роторе-валу закреплено жес гко несколько дисков, каждьй из которых связан внутренним управляемым зацеплением с соответствующим статором со своими элементами управления,
С„1
Фаг. 2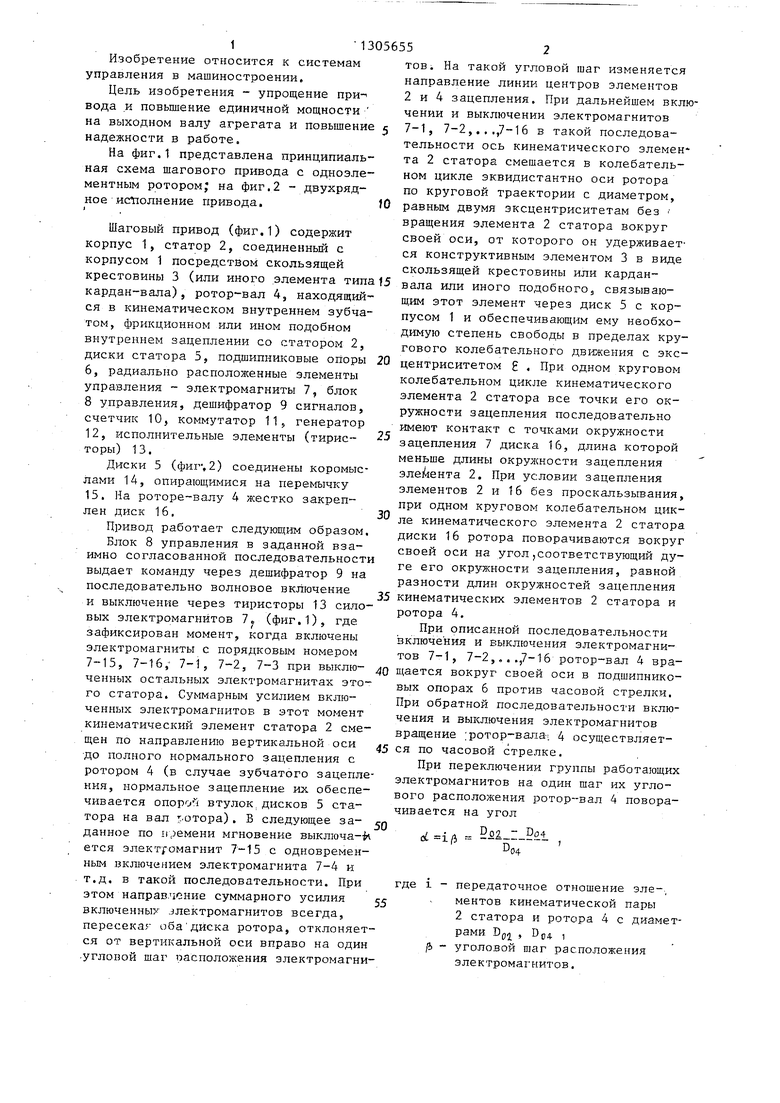
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневмопривод с ручным механическим дублером и гидродемпфером | 1986 |
|
SU1355824A1 |
| ЭЛЕКТРОДВИГАТЕЛЬ | 2006 |
|
RU2321142C1 |
| ИМПУЛЬСНЫЙ ГЕНЕРАТОР ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ | 2001 |
|
RU2256278C2 |
| ВОЗБУДИТЕЛЬ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ | 2008 |
|
RU2440660C2 |
| Электромеханический шаговый двигатель | 1979 |
|
SU864452A1 |
| Шаговый электродвигатель | 1981 |
|
SU1023567A1 |
| ПНЕВМОПРИВОД С РУЧНЫМ ДУБЛЕРОМ И ГИДРОДЕМПФЕРОМ | 1993 |
|
RU2053428C1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА (варианты) | 2016 |
|
RU2622284C1 |
| Револьверный суппорт автоматизированного токарно-револьверного станка | 1974 |
|
SU519285A1 |
| МОТОР-РЕДУКТОР С ИНТЕГРИРОВАННЫМ ПРЕЦЕССИРУЮЩИМ ЗУБЧАТЫМ КОЛЕСОМ (ВАРИАНТЫ) | 2013 |
|
RU2538478C1 |
Изобретение относится к системам управления в машиностроении. Целью изобретения является Упрощение, повышение надежности в работе и повышение единичной-мощности. Шаговый электропривод содержит корпус 1, статор 2 с элементами управления 7., ротор-вал 4, блок управления 8. Ротор соединен с диском 16, находящимся в зацеплении с ответным элементом статора 2, ось которого эксцентрично смещена относительно оси ротора, взаимодействующ1да с радиально расположенными по его периметру элементами управления 7. Ротор соединен с двумя или более дисками. 1 з.п. ф-глы. 2 ил. (Л с оо о СП СУ5 ел ел
Редактор Н, Рогулич
Составитель р. Г удкова
Техред И.Попович Корректор Т. Колб
Заказ 1450/45Тирал 864Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д, 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул, Проектная, 4
| Пневматика и гидравлика | |||
| Приводы и системы управления: Сб., вып.З- М.: Машиностроение, 1976 | |||
| Автоматизация на транспорте и в .дорожном строительстве | |||
| Труды МАДИ | |||
| Веникодробильный станок | 1921 |
|
SU53A1 |
| -М.: Наука | |||
| Приспособление для склейки фанер в стыках | 1924 |
|
SU1973A1 |
