(54) ЭЛЕКТРОМЕХАНИЧЕСКИЙ ШАГОВЫЙ ДВИГАТЕЛЬ
| название | год | авторы | номер документа |
|---|---|---|---|
| Электромеханический шаговый двигатель | 1978 |
|
SU792508A1 |
| МОТОР-РЕДУКТОР С ИНТЕГРИРОВАННЫМ ПРЕЦЕССИРУЮЩИМ ЗУБЧАТЫМ КОЛЕСОМ (ВАРИАНТЫ) | 2013 |
|
RU2538478C1 |
| Двухрежимная электромагнитная муфта | 2022 |
|
RU2788143C1 |
| БЕСШАТУННЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2010 |
|
RU2441997C1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2010 |
|
RU2441996C1 |
| КАЧАЮЩИЙ УЗЕЛ АКСИАЛЬНО-ПОРШНЕВОЙ ГИДРО- ИЛИ ПНЕВМОМАШИНЫ | 1994 |
|
RU2086804C1 |
| МЕХАНИЗМ ВКЛЮЧЕНИЯ СТАРТЕРА | 2009 |
|
RU2451206C2 |
| Устройство для отделения листовых заготовок от стопы | 1990 |
|
SU1761359A1 |
| Поршневая машина Абаимова А-3 | 1989 |
|
SU1712630A1 |
| МЕХАНИЗМ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ ПОРШНЯ ВО ВРАЩАТЕЛЬНОЕ РЕЕЧНО-ШЕСТЕРЕНЧАТОЙ ПЕРЕДАЧЕЙ В ДВИГАТЕЛЕ ВНУТРЕННЕГО СГОРАНИЯ | 2011 |
|
RU2480596C2 |
Изобретение относится к электромгшзи нос троению и может быть испольэовано во всех отраслях народного хозяйства для преобразования электр ческой энергии импульсов в механиче кую работу шагового вращения. Известен шаговый двигатель, соде Жсиций электромагнит с катушкой, полый якорь с направляющим устройством, удерживающим якорь от проворачивания, выходной вал, расположенны внутри полого якоря, и механизм, преобразующий возвратно-поступатель ное движение якоря во вращательное движение выходного ваша 1. Однако цепь передачи вращающего момента двигателя содержит низшую пару в виде скошенньбх пазов, выполненных на внутренней поверхности якоря и установленного на выходном валу кольца, взаимодействующего с пазами якоря при его возвратно-поступательном движении и сообщающего выходному валу дискретное вращение. Такое звено имеет повышенные механические потери за счет сил сухого трения, особенно при передаче значи тельных моментов и не обеспечивает безлюфтовую передачу сигнала управления. Механизм преобразования движ ния указанного устройства, представляющий собой сложный в технологическом отношении узел, не позволяет осуществить реверс. Кроме того, нагрузочные способности и средняя скорость вращения выходного вала ограничены конструкцией механизма преобразования возвратно-поступательного движения и частотой включения электромагнита. Известен электромеханический шаговый двигатель, содержащий корпус, по крайней мере две пары кольцевых электромагнитов, в два раза меньшее количество двухсторонних якорей, выполненных в виде ферромагнитных дисков, выходной вал и механизм преобразования возвратио-поступательного движения якоря во вращательное движение выходного вала, выполненный в виде расположенных на торцах якорей зубчатых венцов и ответных зубчатых венцов 2. В этсм двигателе якори, подвижно посаженные на выходной вал, имеют во время работы двигателя две степени свободы: возвратно-поступательное осевое движение и вращательное движение относительно оси двигателя. При движении якорей теряется энергия
на преодоление сил сухого трения в соединении якорей и вала. Кроме того, массы якорей участвуют в. двух движениях: колебательном и вращательном. При этом создается кинетическая энергия, которая участвует в обратном процессе преобразования энергии и оказывает существенное влияние на приемистость двигателя, снижая этот динамический параметр машины. Потери энергии на сухое трение якорей и вала снижсцот коэффициент полезного действия двигателя, а кинетическая энергия вращения якорей уменьшает его пpи€ й cтocть и тем CSIMHM увеличивает время переходных режимов пуска и останова.
Целью изобретения является увеличение коэффициента полезного действия электромеханического шагового двигателя.
Эта цель достигается тем, что в электромеханическом шаговом двигателе ферромагнитные диски каждого якоря прикреплены посредством кольцевого упругого элемента, например гофра, . корпусу двигателя, а ответные зубчатые венцы установлены неподвижно па валу.
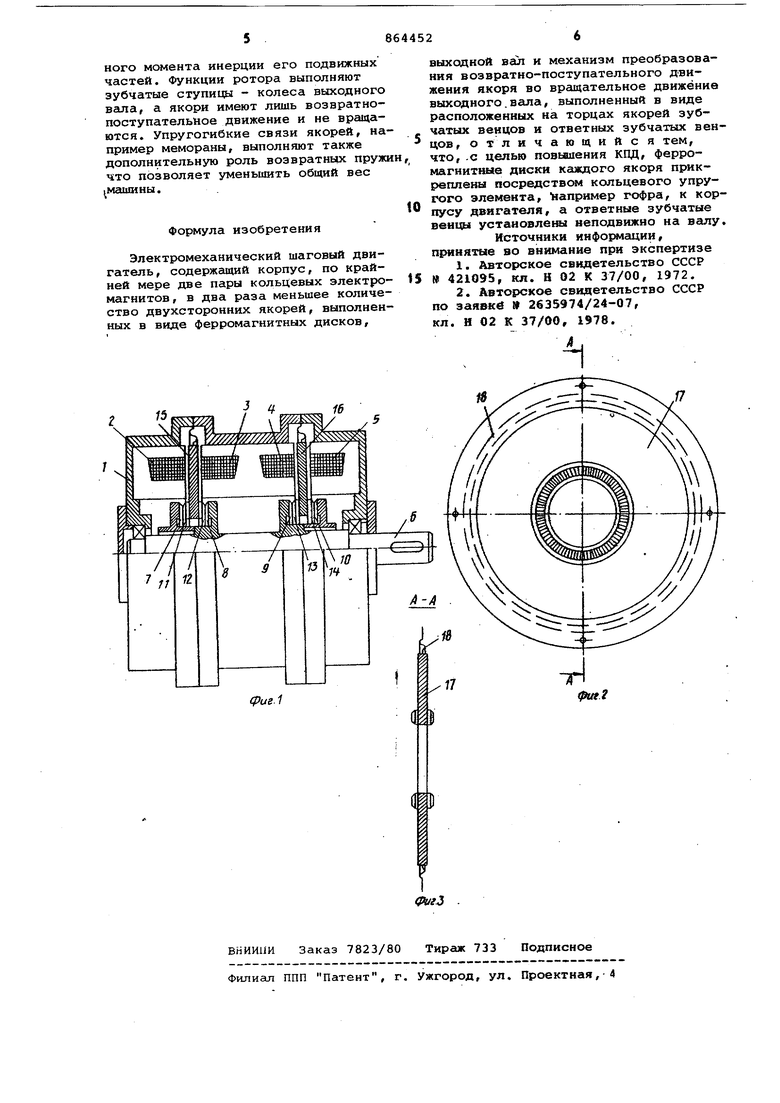
На фиг. 1 изображен предлагаемый, например 4-х ф.азный, электромеханический шаговый двигатель; на фиг.2 якорь; на фиг. 3 - сечение А-А на фиг. 2.
Электромеханический шаговый двигатель (фиг. 1) содержит корпус 1, в котором установлены две пары кольцевых электромагнитов 2 и 3, 4 и 5, вал б, выполненный заодно со ступицами , на внутренних торцах которых нарезаны мелкомодульные зубчатые венцы 7 - 10. Ответные зубчатые венды 13, - 14 нарезаны на торцах якорей 15 16. Якорь состоит (фиг. 2) из ферромагнитного кольцевого центра 17 и гофра 18 (фиг. 3). По внешнему периметру гофра якорь крепится в корпусе двигателя и не имеет вращательного движения. Вераины зубьев венца 13 сдвинуты относительно вершины зубьев зубчатого венца 11, зубчатого венца 12 относительно вершин зубчатого венца 13 и вериин зубьев зубчатого венца 14 относительно вершин зубчатого венца 12 в плоскорти вращения на угол J/pz. Вершины зубчатых венцов 7-10 совмещены в плоскости вращения. Все зубчатые венщд выполнены с одинаковым модулем и числом зубьев zt Катушки электромагнитов образуют 4-х фазную систему обмотки управления. Последовательности включения фаз, позволякядие получить элементарные шаги в прямом и обратнсян направлении, могут реализоваться схемами импульсного управления дискретных приводов с шаговыми двигателями. Под действием электромагнитных сил электромагнитов 2 и 4 якоря
15 и 16 перемещаются. Якорь 15 вводи зубчатый венец 11 в полное зацепление с зубчатым венцом 7, а якорь 16зубчатый венец 13 в неполное зацепление с зубчатым венцом 9..
Первый импульс управления размыкает цепь питания электромагнита 2 и замыкает цепь питания электромагнита 3. Под действием электромагнитных сил электромагнитов 4 и 3 якори 15 и 16 перемещаются. В момент выхода зубчатого венца 11 из зацепления с зубчатым венцом 7 якорь 16 вводит зубчатый венец 13 в полное зацепление с зубчатым венцом 9. В результате взаимодействия зубьев зубчатых венцов 9 и 13 выходной вал поворачивается на угол 1,57 Z. Якорь. 1 вводит в неполное зацепление зубчатый венец 12 с зубчатым венцом 8. Второй импульс управления размыкает цепь питания электромагнита 4 и замыкает цепь питания электромагнита 5. Под действием электромагнитных сил электромагнитов 3 и 5, якори 15,16 перемещаются, в момент выхода зубчатого венца 13 из зацепления с зубчатым венцом 9 якорь 15 вводит зубчатый венец 12 в полное зацепление с зубчатым венцом 8. В результате взаимодействия зубьев зубчатых венцов 12 и.8 выходной вал поворачивается на следующий угол 1,57 Z. Якорь вводит зубчатый венец 14 в неполное зацепление с зубчатым венцом 10.
Третий импульс управления размыкает цепь питания электромагнита 3 и замыкает цепь питания электромагнита 2. Под действием электромагнитных сил электромагнитов 3 и 5 якори 15, 16 перемещаются, в момент выхода зубчатого венца 12 из зацепления с зубчатым венцом 8 яко1-ь 16 вводит зубчатый венец 14 в полное зацепление с зубчатым венцом 10. В результате взаимодействия зубьев зубчатых венцов 14 и 10 выходной вал поворачивается на оче едной угол 1,57 Z. Якорь 15 вводит зубчатый венец 11 в неполное зацепление с зубчатым венцом 7. Для осуществления реверса импульсы управления подаются на обратный
вход схемы управления, которая при этом осуществляет включение электромагнитов в обратной последовательности.
Таким образом, в предложенном электромеханическом шаговом двигателе отсутствуют подвижные шлицевые посадки с фрикционными потерями в кинематической цепи передачи момента Кольцевые якоря крепятся при помсяци мембран и не вращаются, что позволяет, по сравнению с известным увеличить КПД за счет отсутствия механических потерь на преодоление сил сухого трения в конструкции якорей и поднять приемистость двигателя благодаря уменьшению суммарного приведенного момента инерции его подвижных частей. Функции ротора выполняют зубчатые ступицы - колеса выходного вала, а якори имеют лишь возвратнопоступательное движение и не вращаются. Упругогибкие связи якорей, на пример мемораны, выполняют также дополнительную роль возвратньис пруж что позволяет уменьшить общий вес машины. Формула изобретения Электромеханический шаговый двигатель , содержащий корпус, по крайней мере две пары кольцевых электромагнитов , в два раза меньшее количество двухсторонних якорей, выполненных в виде ферромагнитных дисков. вьаходной вал и механизм преобразования возвратно-поступательного движения якоря во враицательное движение выходного.вала, выполненный в виде расположенных на торцах якорей зубчатых венцов и ответных зубчатых венцов , отличающийс я тем, что, -С целью повышения КПД, ферромагнитные диски каждого якоря прикреплены посредством кольцевого упругого элемента, Например гофра, к корпусу двигателя, а ответные зубчатые веи1 установлвтд неподвижно на валу. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 421095, кя. Н 02 К 37/00, 1972. 2.Авторское свидетельство СССР по эая&кё 2635974/24-07, кл. Н 02 К 37/00, 1978.
