Изобретение относится к устройствам для на,глядной демонстрации рабочего процесса машин, например гидравлических экскаваторов.
Цель изобретения - повьпвение точности моделирования рабочего процесса
На фиг.1 представлено устройство для моделирования рабочего процесса гидравлического экскаватора, общий вид; на фиг.2 - траектории режущей кромки ковша .( л- без поворота ковша, о - при повороте ковша).
Устройство включает кривошип 1, стрелу 2 в виде кулисы, связанную с кривошипом кулисным камнем 3, закреп- ленным на ее конце, на стреле размещены упоры 4 и 5, ограничивающие поворот рукоятки 6, шарнирно связанной со (трелой. Рукоять 6 шарнирно связана с 1 овшом 7, который тягой 8 через коромысло 9 и дополнительный кулисный камень 10 связан с шатуном 11. Шатун 11 другим концом связан с кривошипом 1. На шатуне 11 установлены два упора 12, к которым упругим элементом 13 прижаты шайбы 14. Упоры 12 размещены в направляющих корпуса 15, который имеет упоры 16 для шайб 14 и шарниром 17 соединен с рукоятью 6. Шатун 11 пропущен через корпус 15. Кривошип 1, Шатун 11, корпус 15 и коромысло со связывающими их элементами образуют механизм управления.
Устройство работает следующим образом.
При вращении кривошипа 1 и перемещении рукоятки 6 между упорами 4 и 5 стрелы 2 режущая кромка ковша 7 описывает траекторию без поворота ковша 7 относительно рукояти (фиг.2), поскольку шатун 11 вместе с упорами 12 и шайбами 14 остается неподвижным относительно корпуса 15. Как только рукоять 6 коснется упора 5, она останавливается относительно стрелы 2, вместе с ними останавливается и корпус 15. Однако шатун 11 продолжает двигаться, например, вправо и своим левым упором 12 через шайбу 14 сжимает упругий элемент 13 и перемещает кулису 9, осуществляя поворот ковша 7.
В результате в течение выстоя рукояти 6 происходят повороты стрелы 2 и ковша 7. Поворот ковша 7 относительно рукояти 6 демонстрирует увели- чение высоты разгрузки (угла опрокидывания) ковша (фиг.2,, точка о ); копание грунта на конечном участке забоя посредством поворота ковша (фиг.2, точки 5 и g) .
При изменении направления движения шатуна 11 ковш возвращается в исход- ное положение, а рукоять 6 продолжает прижиматься к упору 5 упругим элементом 13 через шайбу 14, упор 16 корпуг са 15 и шарнир 17. В заключительной фазе копания перемещение рукояти 6 ограничивается упором 4, а поворот ковша 7 происходит аналогично.
Перемещая упоры 4 и 5 относительно рукояти 6, можно регулировать фазы поворота ковша 7 на траектории,,
Формула изобре тения
Устройство для моделирования рабочего процесса гидравлического экска- ватора, включающее шарнирно связанные стрелу и рукоять, ковш с тягами, шарнирно связанный с рукоятью, и меха
низм управления,, отличающее с я тем, что, с целью повьш1ения точности моделирования рабочего процес - са, механизм управления выполнен в виде кривошипа, связанного со стрелой посредством закрепленного на ней кулисного камня, шатуна с шарнирно закрепленным на нем дополнительнкм кулисным камнем, корпуса с размещенными в нем шайбами и упругим элементом между ними, и коромысла, связывающего дополнительный кулисный камень с тягой ковша, при этом шатун одним концом связан с кривошипом, а другим - с рукоятью, пропущен через корпус и выполнен с двумя упорами, размещенными в корпусе с возможностью взаимодействия с шайбами, причем корпус шарнирно связан с рукоятью, а стрела снабжена упорами для ограничения поворота рукояти.
При повороте коЗша
Bej поборота ковша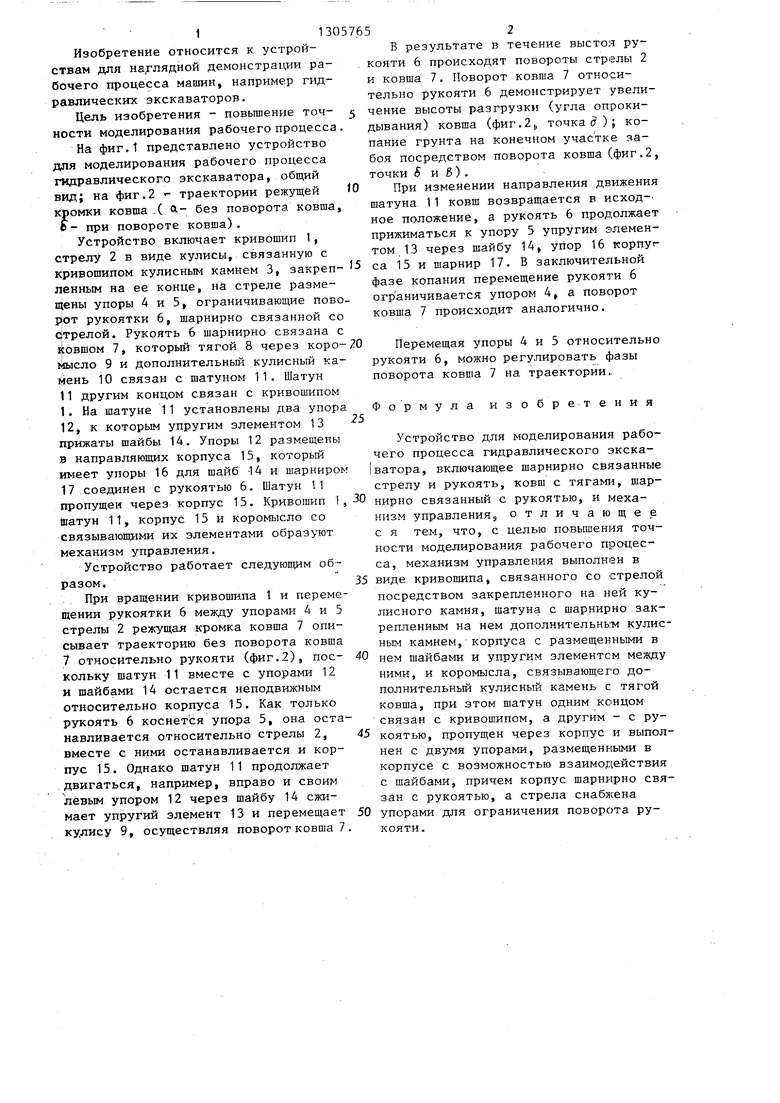
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования рабочего процесса гидравлического экскаватора | 1986 |
|
SU1474223A1 |
| Рабочее оборудование землеройной машины с ковшом обратной лопаты | 1987 |
|
SU1469031A1 |
| Рабочее оборудование экскаватора-погрузчика | 1987 |
|
SU1461825A1 |
| Рабочее оборудование экскаватора-погрузчика | 1989 |
|
SU1684430A1 |
| СПОСОБ ФОРМИРОВАНИЯ ТРАЕКТОРИИ ДВИЖЕНИЯ КОВША КАНАТНОГО КАРЬЕРНОГО ЭКСКАВАТОРА И РАБОЧЕЕ ОБОРУДОВАНИЕ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2485317C2 |
| Устройство для разгрузки стрелы гидравлического экскаватора | 2022 |
|
RU2807273C1 |
| Экскаватор-лопата | 1976 |
|
SU663785A1 |
| Рабочее оборудование экскаватора | 1976 |
|
SU651090A1 |
| Рабочее оборудование экскаватора | 1974 |
|
SU868010A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ГИДРАВЛИЧЕСКОГО ОДНОКОВШОВОГО ЭКСКАВАТОРА | 1970 |
|
SU279462A1 |
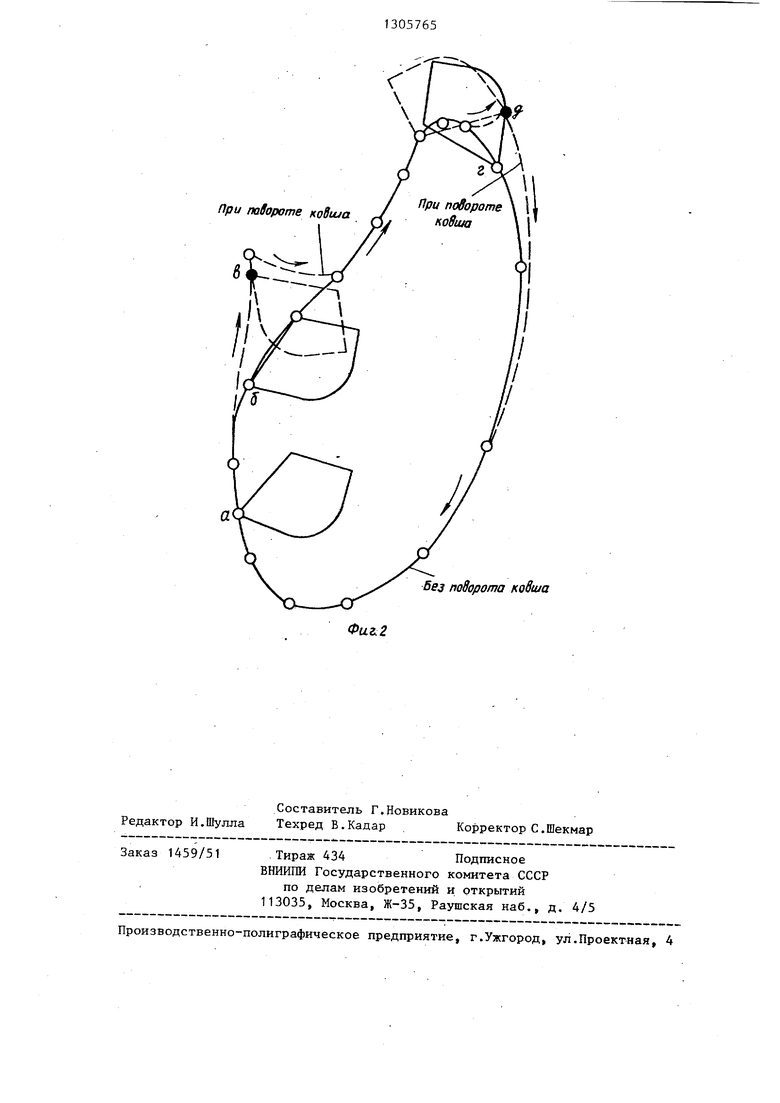
Изобретение позволяет повысить точность моделирования рабочего про- .цесса гидравлического экскаватора. Устройство включает шарнирно . связанные с рукоятью (Р) 6 стрелу 2 с упорами и ковш 7 с тягами 8. Механизм его управления выполнен в виде кривошипа (К) 1, шатуна (Ш) 11 с двумя упорами 12, размещенныьш в корпусе 15, шарнирно связанном с Р 6, и коромысла 9. Причем К 1 связан со стрелой 2 посредством закрепленного на ней кулисного камня 3, а Ш 11 связан одним концом с К 1, а другим - с Р 6. На Ш 11 закреплен дополнительный кулисный камень 10. При вращении К 1 перемещается Р 6 и, дойдя до упора 5, останавливается вместе с корпусом 15 относительно стрелы 2. При этом Ш 11 продолжает двигаться и упором 12 . сжимает элемент 13, поворачивая ковш 7 и демонстрируя увеличение высоты разгрузки ковша 7 и копание грунта на конечном участке забоя. При изменении движения Ш 11 ковш 7 возвращается в исходное положение, а Р 6 прижимается к упору 5. Фазы поворота ковша 7 на траектории регулируются перемещением упоров 4 и 5 относительно Р 6. 2 ил. (О ел Ю со о от CD ел
Редактор И.Шулла
Составитель Г.Новикова
Техред В.Кадар Корректор С.Шекмар
Заказ 1459/51
. Тираж 434Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
| Непрерывно-импульсный регулятор постоянного напряжения | 1982 |
|
SU1032441A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Стенд для испытания металлоконструкций землеройно-транспортных машин | 1983 |
|
SU1071938A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
