(54) РАБОЧЕЕ ОБОРУДОВАНИЕ ЭКСКАВАТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Рабочее оборудование одноковшового экскаватора | 1975 |
|
SU692941A1 |
| Рабочее оборудование гидравлического одноковшового экскаватора | 1969 |
|
SU626168A1 |
| Рабочее оборудование одноковшового экскаватора | 1982 |
|
SU1027338A1 |
| Рабочее оборудование экскаватора обратная лопата | 1977 |
|
SU751912A1 |
| ОДНОКОВШОВЫЙ ЭКСКАВАТОР с УСТРОЙСТВОМдля | 1971 |
|
SU312924A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ОДНОКОВШОВОГО ЭКСКАВАТОРА | 1971 |
|
SU299610A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ОДНОКОВШОВОГО ЭКСКАВАТОРАПАЯ'4:::;^^;^HECHAfi ,\-;oicL'tA | 1971 |
|
SU299607A1 |
| Рабочее оборудование одноковшового гидравлического экскаватора | 1976 |
|
SU604914A1 |
| СМЕННОЕ РАБОЧЕЕ ОБОРУДОВАНИЕ К ОДНОКОВШОВОМУ | 1968 |
|
SU210755A1 |
| ОДНОКОВШОВЫЙ ЭКСКАВАТОР (ВАРИАНТЫ) | 2002 |
|
RU2211290C1 |
1
Изобретение относится к контролю и управлению глубиной копания землеройных машин, а именно одноковшовых экскаваторов.
Известны устройства для контроля глубины копания .одноковшового экскаватора относительно уровня его стоянки 1.
Они могут эффективно работать лишь на специально запланированных трассах и имеют поэтому крайне ограниченное применение.
Наиболее близким, к предлагаемому является оборудование для контроля глубины копания одноковшового экскаватора-обратной лопаты относительно копирной линии, заданной визирами, оптическим лучом или копиром-нитью 2.
Недостаток этого оборудования в том, что контроль глубины может производиться только при одном положении рукояти с ковшом, так как высота указателя глубины копания над режуш,ей кромкой ковша меняется в зависимости от угла поворота рукояти.
Из-за этого контроль глубины в течение всего процесса копания (на всей рабочец траектории ковша) невозможен, что приводит к ухудшению качества работ и снижению производительности.
Цель изобретения - повышение качества контроля глубины копания путем обеспечения непрерывного сравнения действительной и заданной глубины копания при любом положении рукояти.
Поставленная цель достигается тем, что рабочее оборудование экскаватора, содержашее стрелу рукоять с ковшом и указатель, связанный с экскаватором и служаший для контроля глубины копания по отношению к копиру, снабжено закрепленной на экскаваторе тягой с шарнирно прикрепленной к ней и к концу стрелы стойкой, толкателем с кулисой, имеюшей палец для соединения с рукоятью экскаватора и ползун, установленный в кулисе и промежуточным звеном для шарнирной связи указателя с толкателем, при этом стойка имеет средства для ее шарнирного соединения со стрелой, толкателем, указателем и тягой, образуюш,ие параллелограмм.
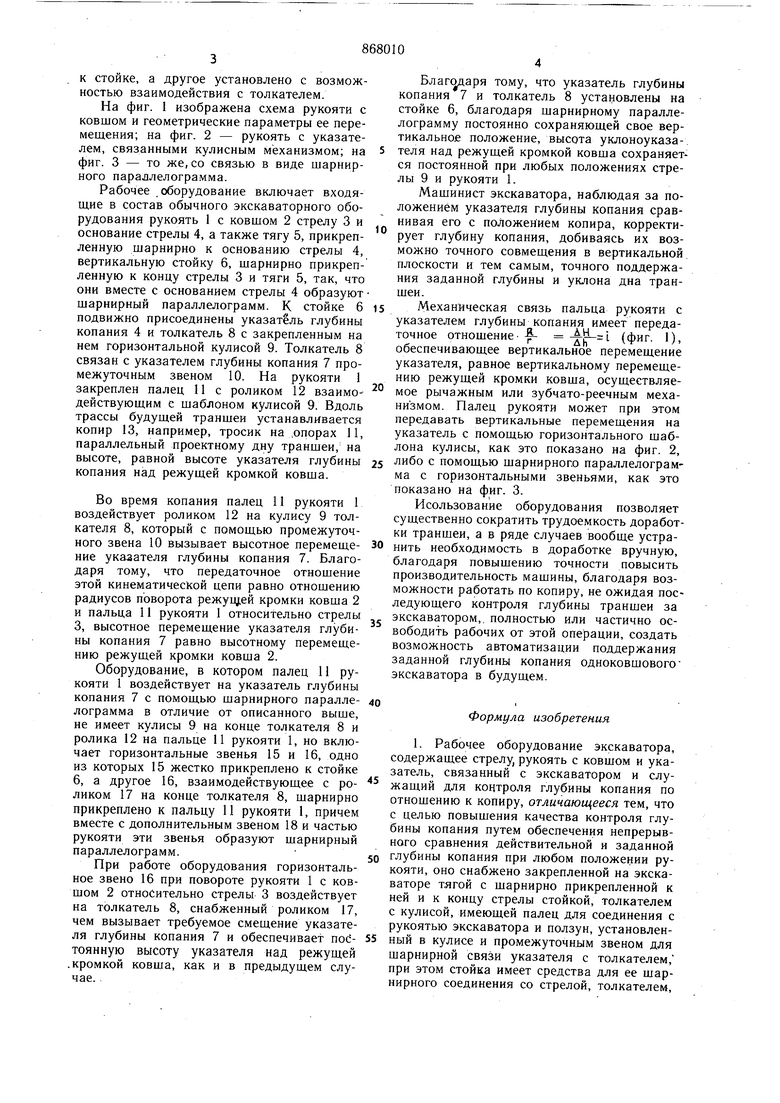
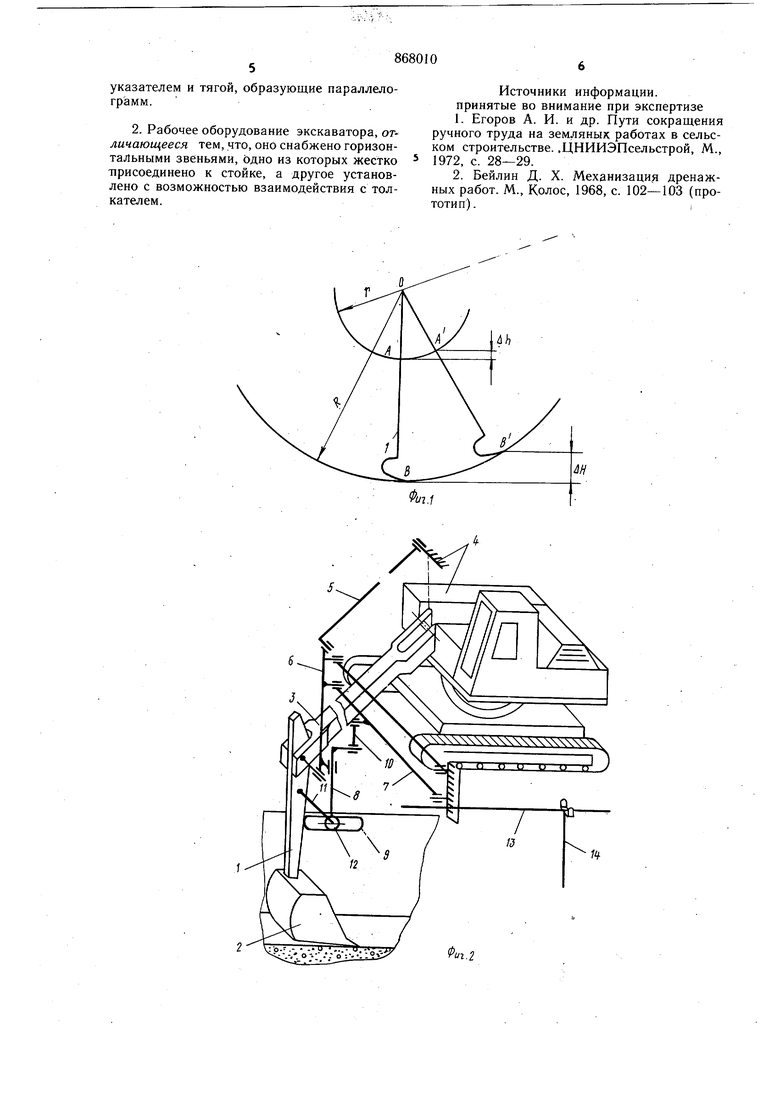
Кроме того, рабочее оборудование экскаватора снабжено горизонтальными звеньями, одно из которых жестко присоединено к стойке, а другое установлено с возможностью взаимодействия с толкателем. На фиг. 1 изображена схема рукояти с ковшом и геометрические параметры ее перемещения; на фиг. 2 - рукоять с указателем, связанными кулисным Механизмом; на фиг. 3 - то же, со связью в виде шарнирного параллелограмма. Рабочее оборудование включает входяш,ие в состав обычного экскаваторного оборудования рукоять 1 с ковшом 2 стрелу 3 и основание стрелы 4, а также тягу 5, прикрепленную шарнирно к основанию стрелы 4, вертикальную стойку б, шарнирно прикрепленную к концу стрелы 3 и тяги 5, так, что они вместе с основанием стрелы 4 образуют шарнирный параллелограмм. К стойке б подвижно присоединены указатель глубины копания 4 и толкатель 8 с закрепленным на нем горизонтальной кулисой 9. Толкатель 8 связан с указателем глубины копания 7 промежуточным звеном 10. На рукояти 1 закреплен палец 11 с роликом 12 взаимодействующим с щаблоном кулисой 9. Вдоль трассы будущей траншеи устанавливается копир 13, например, тросик на .опорах 11, параллельный проектному дну транщеи, на высоте, равной высоте указателя глубины копания над режущей кромкой ковща. Во время копания палец 11 рукояти 1 воздействует роликом 12 на кулису 9 толкателя 8, который с помощью промежуточного звена 10 вызывает высотное перемещение указателя глубины копания 7. Благодаря тому, что передаточное отношение этой кинематической цепи равно отношению радиусов поворота peжyпJ.eй кромки ковша 2 и пальца 11 рукояти 1 относительно стрелы 3, высотное перемещение указателя глубины копания 7 равно высотному перемещению режущей кромки ковща 2. Оборудование, в котором палец 11 рукояти 1 воздействует на указатель глубины копания 7 с помощью щарнирного параллелограмма в отличие от описанного выше, не имеет кулисы 9 на конце толкателя 8 и ролика 12 на пальце 11 рукояти 1, но включает горизонтальные звенья 15 и 16, одно из которых 15 жестко прикреплено к стойке б, а другое 16, взаимодействующее с роликом 17 на конце толкателя 8, щарнирно прикреплено к пальцу 11 рукояти 1, причем вместе с дополнительным звеном 18 и частью рукояти эти звенья образуют шарнирный параллелограмм. При работе оборудования горизонтальное звено 16 при повороте рукояти 1 с ковшом 2 относительно стрелы 3 воздействует на толкатель 8, снабженный роликом 17, чем вызывает требуемое смещение указателя глубины копания 7 и обеспечивает nodтоянную высоту указателя над режущей .кромкой ковша, как и в предыдущем случае, Благодаря тому, что указатель глубины копания 7 и толкатель 8 установлены на стойке б, благодаря шарнирному параллелограмму постоянно сохраняющей свое вертикальное положение, высота уклоноуказателя над режущей кромкой ковша сохраняется постоянной при любых положениях стрелы 9 и рукояти 1. Машинист экскаватора, наблюдая за положением указателя глубины копания сравнивая его с положением копира, корректирует глубину копания, добиваясь их возможно точного совмещения в вертикальной, плоскости и тем самым, точного поддержания заданной глубины и уклона дна траншеи. Механическая связь пальца рукояти с указателем глубины копания имеет передаточное отношение- Afi (фиг. 1), обеспечивающее вертикальное перемещение указателя, равное вертикальному перемещению режущей кромки ковша, осуществляемое рычажным или зубчато-реечным механизмом. Палец рукояти может при этом передавать вертикальные перемещения на указатель с Помощью горизонтального щаблона кулисы, как это показано на фиг. 2, с помощью щарнирного параллелограмма с горизонтальными звеньями, как это показано на фиг. 3. Исользование оборудования позволяет существенно сократить трудоемкость доработки траншеи, а в ряде случаев вообще устранить необходимость в доработке вручную, благодаря повышению точности повысить производительность машины, благодаря возможности работать по копиру, не ожидая последующего контроля глубины траншеи за экскаватором,, полностью или частично освободить рабочих от этой операции, создать возможность автоматизации поддержания заданной глубины копания одноковшового экскаватора в будущем. Формула изобретения 1. Рабочее оборудование экскаватора, содержащее стрелу, рукоять с ковшом и указатель, связанный с экскаватором и служащий для контроля глубины копания по отношению к копиру, отличающееся тем, что с целью повышения качества контроля глубины копания путем обеспечения непрерывного сравнения действительной и заданной глубины копания при любом положении рукояти, оно снабжено закрепленной на экскаваторе тягой с шарнирно прикрепленной к ней и к концу стрелы стойкой, толкателем с кулисой, имеющей палец для соединения с рукоятью экскаватора и ползун, установленный в кулисе и промежуточным звеном для шарнирной связи указателя с толкателем, при этом стойка имеет средства для ее шарнирного соединения со стрелой, толкателем.
указателем и тягой, образующие параллелограмм. ,
Источники информации, принятые во внимание при экспертизе
о - х
п
W
п
