вращении кривошипа 1. При этом К 5 описывает траекторию без поворота относительно Р. А, так как .упругий элемент 13 прижимает рычаг 9 к У 11. При остановке рычага 9 на У 7 и продолжении движения Р 4 упругий элемент 13 растягивается, а рычаг Ю поворачивает К 5 относительно Р 4 (положение а) до касания рычага 9
с У 12. Упругий элемент 13 переходит через мертвое положение и при этом фиксирует К 5 в положении г. При остановке рычага 9 на У 8 движением Р 4 рычаг 10 перемещается и переводит упругий элемент 13 через мертвое положение, при этом К 5 фиксируется в положении в, а У 11 контактирует с рычагом 9. 2 ил.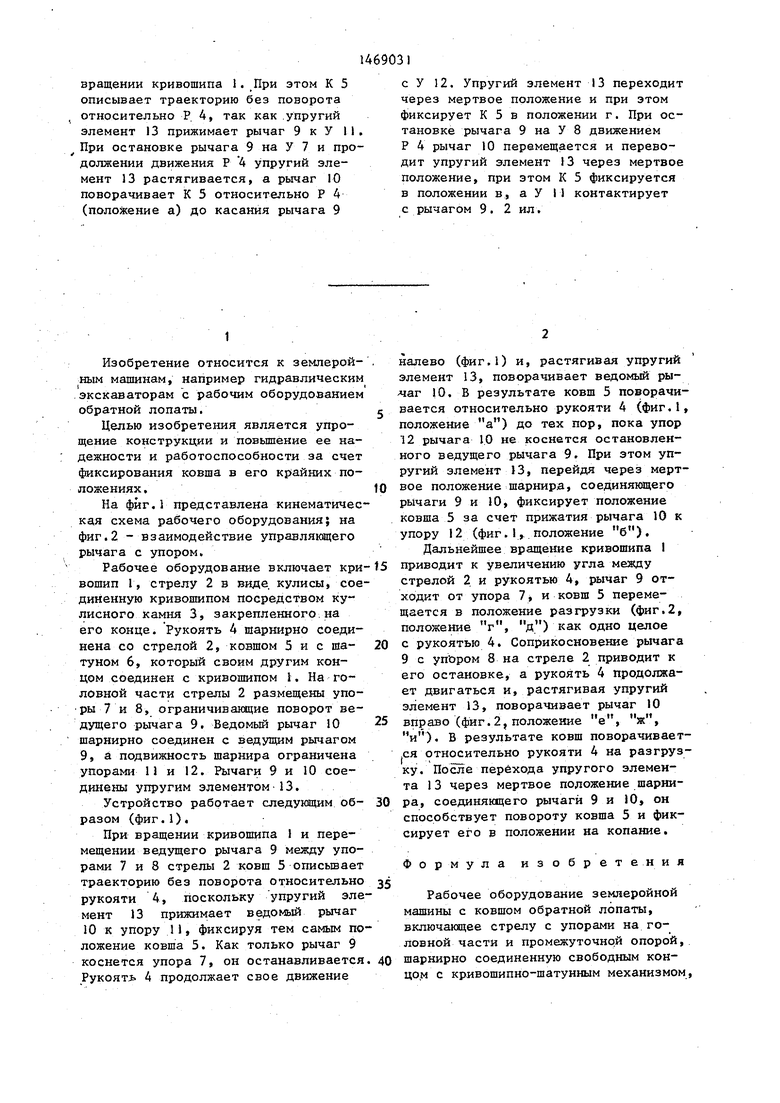
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования рабочего процесса гидравлического экскаватора | 1985 |
|
SU1305765A1 |
| Землеройная машина многоцелевого назначения | 1987 |
|
SU1654467A1 |
| Рабочее оборудование одноковшового экскаватора | 1986 |
|
SU1408023A1 |
| Рабочее оборудование гидравлического экскаватора | 1986 |
|
SU1377335A1 |
| Устройство для разгрузки стрелы гидравлического экскаватора | 2022 |
|
RU2807273C1 |
| Грузоподъемное устройство | 1988 |
|
SU1562298A1 |
| Рабочее оборудование одноковшового гидравлического экскаватора | 1986 |
|
SU1432143A1 |
| СПОСОБ РАЗРАБОТКИ ГОРНО-ДОБЫЧНОГО ЗАБОЯ И КАРЬЕРНЫЙ КАНАТНЫЙ ЭКСКАВАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2455427C2 |
| Рабочее оборудование одноковшового экскаватора | 1982 |
|
SU1027338A1 |
| Рабочее оборудование землеройной машины | 1985 |
|
SU1312144A1 |
Изобретение относится к землеройным машинам. Цель - упрощение конструкции и повьшение ее надежности и работоспособности за счет фикси- ров-ания ковша в его крайних положениях. Рабочее оборудование землеройной машины включает стрелу 2 с упо- рами (У) 7 и 8 на ее головной части и промежуточной опорой; присоединенные шарнирно к головной части стрелы 2 рукоять (Р) 4 с ковшом (К) 5 и шар- кирно сочлененные ведущий 9 и ведомый 10 рычаги управления К 5. Свободным концом стрела 2 шарнирно соединена с кривошипно-шатунным механизмом, шатун которого 6 соединен с Р 4. Ведущий рычаг 9 установлен с возможностью взаимодействия с У 7 и 8 на головной части стрелы 2. Шарнир соединения ведущего 9 и ведомого 10 рычагов выполнен с У П и 12, установленными с возможностью их взаимодействия с ведущим рычагом 9, а самя рычаги 9 и 10 соединены упругим элементом 13. Ведущий рычаг 9 перемещается шатуном 6 меяаду У 7 и 8 при S с (Л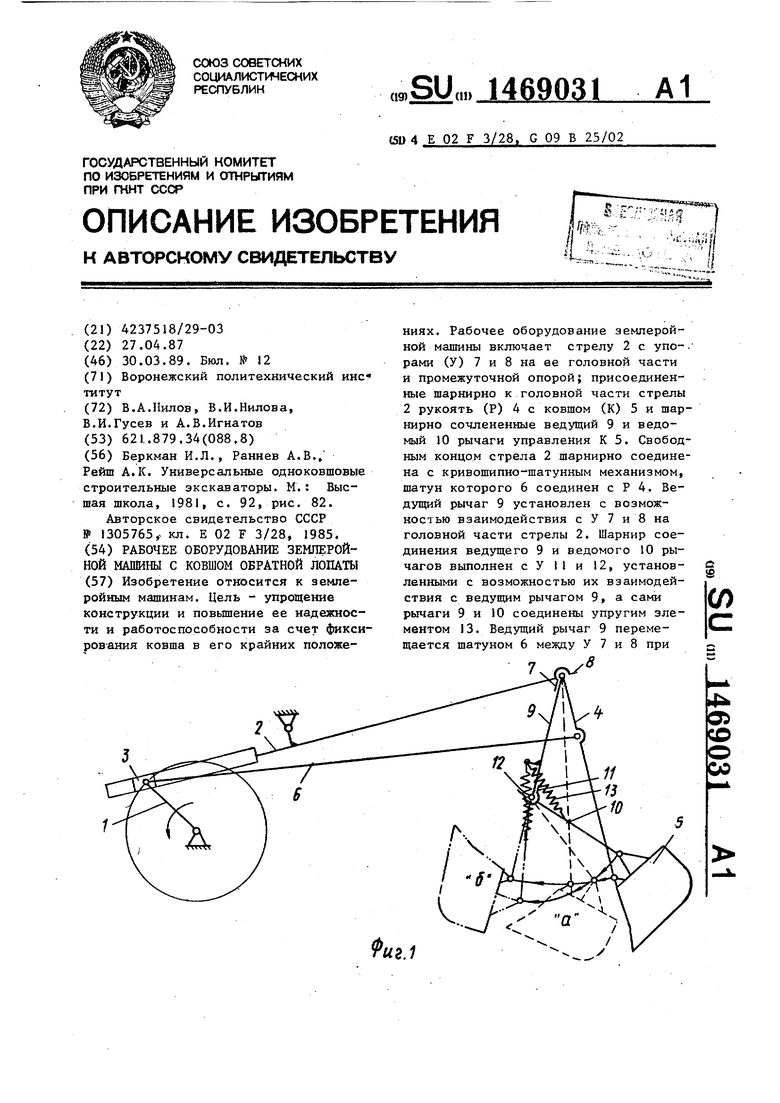
1
Изобретение относится к землеройным машинам, например гидравлическим .экскаваторам с рабочим оборудованием обратной лопаты.
Целью изобретения является упрощение конструкции и повышение ее надежности и работоспособности за счет фиксирования ковша в его крайних положениях.
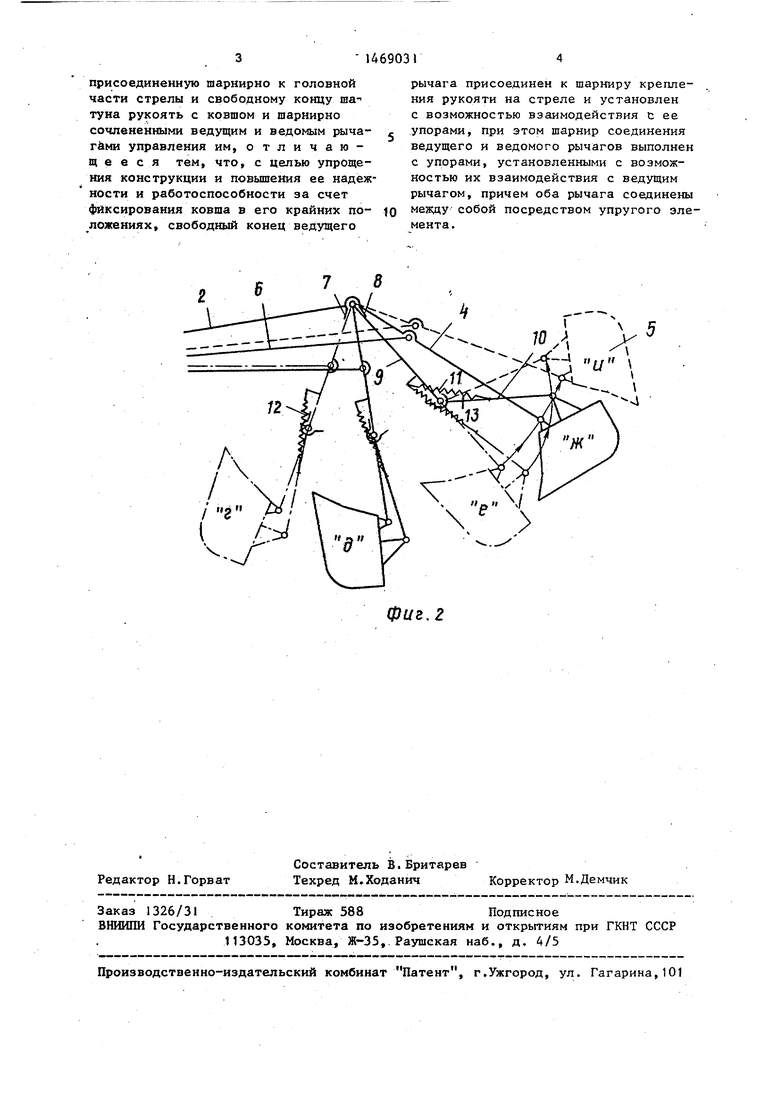
На фиг.1 представлена кинематическая схема рабочего оборудования; на фиг.2 - взаимодействие управляющего рычага с упором.
Рабочее оборудование включает кривошип 1, стрелу 2 в виде, кулисы, соединенную кривошипом посредством кулисного камня 3, закрепленного.на его конце. Рукоять 4 шарнирно соединена со стрелой 2, ковшом 5 и с шатуном 6, который своим другим концом соединен с кривошипом I. На головной части стрелы 2 размещены упоры 7 и 8, ограничивагацие поворот ведущего рычага 9. Ведомый рычаг 10 шарнирно соединен с ведущим рычагом 9, а подвижность шарнира ограничена упорами 11 и 12. Рычаги 9 и 10 соединены упругим элементом-13.
Устройство работает следующим образом (фиг.1).
При вращении кривошипа 1 и перемещении ведущего рычага 9 между упорами 7 и 8 стрелы 2 ковш 5 описьшает траекторию без поворота относительно рукояти 4, поскольку упругий элемент 13 прижимает ведомый рычаг 10 к упору 11, фиксируя тем самым положение ковша 5. Как только рычаг 9 коснется упора 7, он останавливается Рукоят 4 продолжает свое движение
налево (фиг.1) и, растягивая упругий элемент 13, поворачивает ведомый ры- /чаг 10. В результате ковш 5 поворачивается относительно рукояти 4 (фиг.1, положение а) до тех пор, пока упор 12 рычага 10 не коснется остановленного ведущего рычага 9. При этом упругий элемент 13, перейдя через мертвое положение шарнира, соединяющего рычаги 9 и 10, фиксирует положение ковша 5 за счет прижатия рычага 10 к упору 12 (фиг.1 положение б). Дальнейшее вращение кривошипа I
приводит к увеличению угла между стрелой 2. и рукоятью 4, рычаг 9 отходит от упора 7, и ковш 5 перемещается в положение разгрузки (фиг.2, положение г, д) как одно целое
с рукоятью 4. Соприкосновение рычага 9 с упЪром 8 на стреле 2 приводит к его остановке, а рукоять 4 продолжает двигаться и, растягивая упругий элемент 13, поворачивает рычаг 10
вправо (фиг. 2, положение е, ж,
и). В результате ковш поворачивается относительно рукояти 4 на разгрузку. После перехода упругого элемента 13 через мертвое положение шарнира, соединяющего рычаги 9 и 10, он способствует повороту ковша 5 и фиксирует его в положении на копание.
Формула изобретения
Рабочее оборудование землеройной машины с ковшом обратной лопаты, включающее стрелу с упорами на головной части и промежуточной опорой, шарнирно соединенную свободным концом с кривошипно-шатунным механизмом.
присоединенную шарнирно к головной части стрелы и свободному концу ша- туна рукоять с ковшом и шарнирно сочлененными ведущим и ведомым рыча- гйми управления им, отличающееся тем, что, с целью упрощения конструкции и повышения ее надежности и работоспособности за счет фиксирования ковша в его крайних положениях, свободный конец ведущего
/ N2 А/
i
( Ы
ч.
рычага присоединен к шарниру крепления рукояти на стреле и установлен с возможностью взаимодействия с ее упорами, при этом шарнир соединения ведущего и ведомого рычагов выполнен с упорами, установленными с возможностью их взаимодействия с ведущим рычагом, причем оба рычага соединены между собой посредством упругого элемента.
фиг, 2
| Беркман И.Л., Раннев А.В., Рейш А.К | |||
| Универсальные одноковшовые строительные экскаваторы | |||
| М.: Высшая школа, 1981, с | |||
| Автоматический огнетушитель | 0 |
|
SU92A1 |
| Машина для разделения сыпучих материалов и размещения их в приемники | 0 |
|
SU82A1 |
| Устройство для моделирования рабочего процесса гидравлического экскаватора | 1985 |
|
SU1305765A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
