(54) ЭКСКАВАТОР-ЛОПАТА




| название | год | авторы | номер документа |
|---|---|---|---|
| Экскаватор-лопата | 1979 |
|
SU848535A1 |
| Рабочее оборудование экскаватора | 1981 |
|
SU1033646A1 |
| СПОСОБ РАЗРАБОТКИ ГОРНО-ДОБЫЧНОГО ЗАБОЯ И КАРЬЕРНЫЙ КАНАТНЫЙ ЭКСКАВАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2455427C2 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ КАРЬЕРНОГО ЭКСКАВАТОРА | 2014 |
|
RU2577870C2 |
| СМЕННОЕ РАБОЧЕЕ ОБОРУДОВАНИЕ ТИПА ПРЯМОЙ ЛОПАТЫ ОДНОКОВШОВОГО ЭКСКАВАТОРА | 1969 |
|
SU239130A1 |
| Одноковшовый карьерный экскаватор | 1989 |
|
SU1745821A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ КАРЬЕРНОГО ЭКСКАВАТОРА | 2014 |
|
RU2573143C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭКСКАВАЦИЕЙ ГРУНТА И ЭКСКАВАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2436900C2 |
| Бункерный ковш траншейного экскаватора | 1982 |
|
SU1059074A2 |
| Одноковшовый экскаватор | 1991 |
|
SU1799414A3 |




. / Изобретение относится к одноковшовым экскаваторам, оборудованным прямой лопатой.
.::,-Известен экскаватор-прямая лопата, на поворотной платформе которого размещены два копающих механизма и неподвижно закрепленные к платформе двуйогая стойка и нижняя часть стрелы, соединенная шарнирно с поворачивающейся в Вертикальной плоскости верхней ее частью; экскаватор содержит также jiykoять и ковш l.;
Подъёйный и напорный копаюжие механизмы такой машины взаимодействуйтг через ковш и рукоять. При этом состав ляющая подъемного усилия,дейстЬукицая , вдоль рукояти от забоя, направлена навстречу усилию напорного механизма ; на забой. Из-за противодействия копаю-; ших механизмов только часть мошйостй подъемного механизма используется При копании для разрушения горной MaccjEd Известен также экскаватор- юпата, включаюши 1 в себя поворотную платформу, удерживающий и подъемный механизмы, две установленные на поворотной
: платформе качающиеся в вертикальной плоскости стойки, из которых через главный вал соединена с рукоятью ковша и подъемной стойкой 2. В этом экскаваторе подъемный механизм соединен канатом с подъемной рамой и через обойму подъемногоПолиспаста - с нижнейчастью качающейся стойки, на которой смонтирована подъемная рама. Удерживающий механизм таКже через канат соединен с
другой качающейся стойкой, которая связана с подъемной рамой тягами. Поворот всего рабочего оборудования от забоя осуществляется удерживающим механизмом с помощью каната, огибающего блоки, установленные в вершине удерживаю г шей СТОЙКИ} закрепленной неподвижно на поворотной платформе. Ковш может
поворачиваться вверх до упора на рукоя1и под действием собственного веса. Удерживается ковш от разворота вверх и поворачивается вниз с помощью механичес
кого пантографа .и гидравлической системы, содержащей .цилиндры одностороннего действия, установленные на поворотной платформе. Пантограф содержит-рычаги, разменянные внизу качающейся стойки, и коромыслаа устанЬвленные на соединенном с этой стойкой главном валу. Коромысла связаны С рьгчагами и ковшом канатами. Гидросистема механизма поворота ковша включает пневмоаккумуляторы, заряжаемые энергией поворачивающегося вверх под действием собст- венногС) реса ковша. Экскаватор может эффективно разрабатьщать низкие .хорошо обрушенные забои горизонтальньГми резами и оснащается ковшом большей BMICOCти, чем экскавйтор спротиводействующими механизмами. Металлоемкость; машины получается меньшей, чем экскаватора с противодействующими копающими механизмами. Этот эффект-достигнут благодаря наличию поворотного ковша и кинематике рабочего оборудований, при которой все несущие конструкции оборудования могут поворачиваться, смещаясь в исправлении забоя,
Однако известный экскаватор имеет следующие недостатки:, .;::„„-..-
зак. Эти элементы рабочего оборудования представляют собой сложные йварньш конструкции и содерж:ат поэтому много концентраторов напряжений. Подъемная рама- громоздкая качающаяся констругсция - расположена на значительном вылете от оси вращения экскаватора. Из-за
размещенной в нижней части Качающейся стойки обоймы подъемного полиспаста равнодействующая усилий в подъемных канатах проходи вблизи нижнего шарнира качающейся стойки и не удерживает рабочее оборудование от поворота вперёд. Для удержания рабочего оборудования необходима дополнительная затрата энергии
5„ Экскаватор не может эффективно разбирать высокие связные забои и вести селективную разработку полезных ископаемых, так как суммарный момент, дейстгвующий в умзанных режимах .на ковш, -прижимает последний к упору на рукояти. Пантограф и связанная с ним гидросистема способны повернуть ковш, свободный от Внешних нагрузок, только в крайнее нижнее положение.
О
Цель изобретения - снижение массы экскаватора, энергоемкости копания и повьш1ение надежности,
Это достигается тем, что связанная С главным валом качающаяся стойка вьг. полнена в виде плоской фермы и соединена с треугольной качающейся стойкой сцентрированными в ее вершину и наклоненными между собой под острым углом подкосами, а в вершине треугольной стой0ки установлены блоки, огибаемые канат ом подъемного механизма, .
Ограничение .кинематики поворо-га ка- чающихся стоек вперед осуществляется тем, что.на поворотной платформе уста5новлена вспомогательная стойка, соеди йённая сосвязанными между со,бой через ось вспомогательными тяглами, одна из которьгхсвязана с вершиной треугольной качающейся стойки, при этом ось, соедИ0няющая .. вспомогательные тяги, связана с канатом удерживающего механизма, а длина вспомогательных тяг выбрана такой, что при повороте качающихся стоек в крайнее переднее пойожеийе угол между вспомог1ательными тягами равен 180.
Для увеличения усилий резания acnoirfoгательные тяги соединены со снабженными блоками напорным стержнем, опирающимся на седло, установленное вместе е другими блоками, огибаемыми Канатами удерживающего механизма, на оси, закрепленной, к поворотной платформе удерживающей стойки.
Для принудительного поворота ковша
i сггносительно рукояти, ниже крепления рукояти к ковшу, связанному с подъемной тягой, присоединены тяги, соединенные через установленные на главном валу рычаги второго рода со стержнями, свяOзывающими кривошипы раамещенного на поворотной платформе рейерсйвног.о механизма.
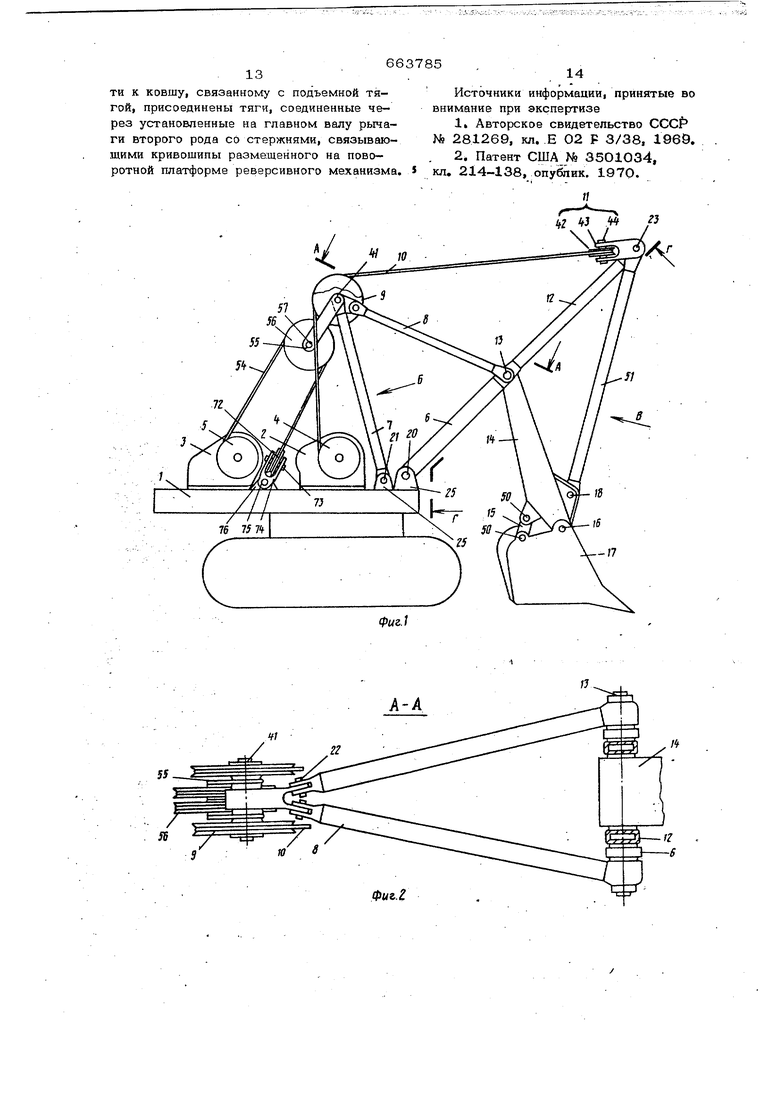
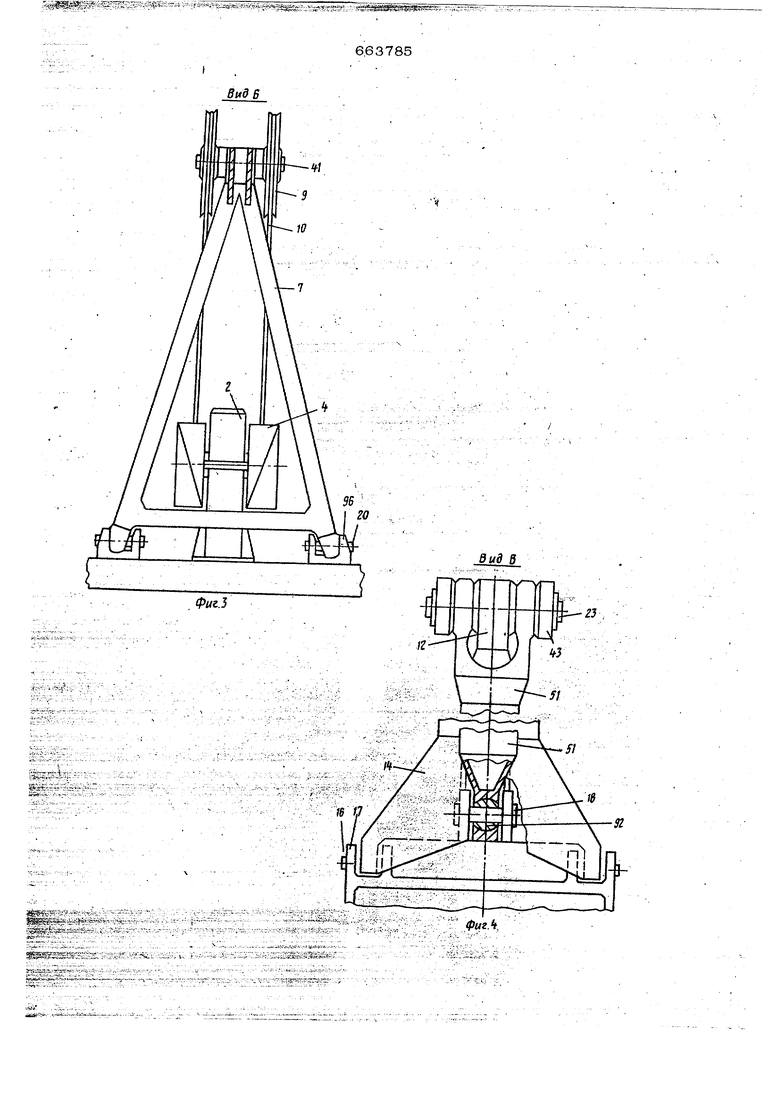
На фиг. 1 изображен предлагаемый экскаватор с закрепленными относитель5но рукоятки ковшом, вид сбоку; на фиг, 2 Сечение А-А н фиг, 1 (на наклонные ПОД косы); на фиг, 3 - вид по стрелке Б на фиг, 1 (на треугояьйу стойку и подъемный механизм); на фиг. 4 - вид по стрелке 8на фиг. 1 (на подъемную тягу и ковш спереди; тяга и рукоять показаны с ей- рьюом);нафиг. 5 - сечениеГ-Г на фиг. f (на подъемную и качающуюся стойки спереди); на фиг, 6 - машина, дополненная поворачивавшимся ковшом и конструкциями, ограничивакяцими поворот качакйцахся стоек вперед, вид сбоку; на фиг. 7 - сечение Д-Д на фиг. 6; на фиг, 8 - сечение. Е-Е на фиг. 6 (на привод механизма поворота ковша); на фиг. 9 -сечение Ж-Ж на фиг, 6 (на подъемную и качающуюся стойки спереди); на фиг, 1О - вид по стрелке 3 на фиг, б (на подъемную тягу спереди). Экскаватор включает в себя поворотную платформу 1 с установленными на ней подъемным 2 и удерживающим 3 механизмами, снабженными соответственно барабанами 4 и 5. Качающиеся стойки 6 и 7 соединены наклоненными под остръгм углом подкосами 8. В вершине треугольной качающейся стойки 7 на оси размещены блоки 9, огибаемые канатом 10, Этот канат соединяет барабан 4 подъемной лебедки 2 через уравнительное устройство 11 с вершиной подъемной стойки 12 (см. фиг. 1). Подъемная стойка 12 связана с качающейся стойкой 6 через главньй вал 13. Рукоять 14 соединена 9качающейся стойкой главным валом 13 который в качающейся стойке 6 (см. фиг. 5 и 9) является элементом этой решетчатой конструкции, В экскаваторе (см, фиг, 1) к рукояти 14 с помощью тяг 15, осей 16 присоединен ковш 17. Позициями 18-23 обозначены оси. Стойки 24 установлены с помощью осей 2.0 в кронштейнах 25 пов ротной платформы 1. Качающаяся стойка 6 включает в себя отдельные стойки 24 раскосы 26, соединенные через оси 27, К ковшу 17 (см. фиг, 6,9 и 10) при соединены тяги 28 посредством осей 29 которые связаны через оси 30 и рычаги 31, установленные консольно на валу 13 ср стержнями 32, Кривошипы 33, закреп ленные от вращения на валах 34, размешены в кронштейнах 35, установленных на поворотной платформе 1. Стержни 32 (см. фиг, 8,9) осями 36 соединены с кривошипами 33, связанными через оси 34 и муфты 37 с редуктором 38 на быстроходном валу которого с одной стороны установлен тормоз 39, с другой электродвигатель 40. Редуктор 38, тор моз 39 и электродвигатель 40 закреплены на поворотной платформе 1, Блоки 9 размещены на оси 41. Конструкция и крепление, подкосов 8 и треугольной качающейся стойки 7 для машины, изображенной на фиг, 6, подобны этим элементам для машины, изображенной на фиг, 1 (см. фиг, 2 и 3). Подкосы 8 прикреплены к главному валу 13 между стойками 24 (см. фиг. 9). . Уравнительное устройство 11 (см, фиг, 1) включает в. себя блок 42, траверсу 43, ось 44. Вместо устройства 11 могут использоваться два блока 45 (см. фиг, 6,9 и 10), установленные, на оси 23, В этом случ&е средняя часть каната 10 огибает блок 46 уравнительного устройства, закрепленного с помошыо траверсы 47, серег 48, осей 41 и 49 на качающейся стойке 7, Оси 50 и 16 предназначе 1ы для присоединения тяг 15 к рукояти 14 и ковшу 17,Подъемная тяга 51 (см, фиг. 6 и 1Q) крепится к соединительной TJ.i-e, связанной со стойкой 12, осью 23, 52 и 53 оси. На барабане удерживающего механизмаЗ закреплен канат54 (см1фиг, 1),соединенньй через серьги 55, блоки 56 и ось 57 с осью 41 качающейся стойки 7, Для ограничения поворота качающейся стойки 6 вперед (см. фиг, 6) используются вспомогательные тяги 58 и 59, соединенные осью 60, на которой разм&щены блоки 61, Верхняя вспомогательная тяга 58 соединена .с вершиной качающей ся стойки 7 осью 41, Вспомогательная нижняя тяга 59 через ось 62 закреплена на вспомогательной стойке 63, установленной с помощью осей и кронштейнов на поворотной платформе 1, Дополнительное увеличение усилий резания достигается с помощью размещенных в вершине удерживающей стойки 64 (см. фиг. 6 и 7) ОСИ-65 с хомутами 66 блоков 67 и 68, двухручьевыхблоковбЭ и качающегося седла 70, на которое опирается напорный стержень 71, Стержень 71 спереди соединен через ось 60 с тя- гами 58 и 59, Средняя часть каната 54 огибает уравнительный блок 72, установновденный на оси 73 в обойме 74, которая через ось 75 крепится к кронштейну 76 поворотной платформы 1. Сзади по обе стороны стержня 71 на оси 77 симметрично установлены два блока 78, огибаемые канатом 79. По обе стороны седла 70 с блоков 78 проходит по две ветви каната 79. Одна пара симметрично расположенных относительно седла ветвей каната 79 опирается на ручьи блоков 67, далее огибает уравнительный блок 80, закрепленный через ось 81 в обойме 82, которая связана осями 83 и 84 с кронштейнам 85 поворотной платфорк-1ы 1. Другая пара симметричных ветвей каната 79 огибает блок 69 по ручьяМа расположенным со стороны блоков 67. Концы каната 79 закреплены на барабане 5 удерживающего механизма 3. С другой стороны к барабану 5 крепится .канат 86, огибающий парой симметричньк ветвей блоки 69 (см. фиг. 7) по свободнымот каната. 79 ручьям. Далее, эти ветви каната 86 огибают размешенную симметрично пару блоков 61, блоки .68 (см. фиг, 6 и 7) в вершине удерживающей стойки 64 и блок 87, закреплен ный на оси 88 к обойме 89, которая через ось 90 и кронштейн 91 связана с поворотной платформой 1. Подъемная тяга 51 (см. фиг. 1 и 4) с одной стороны через ось 18 и сферический шарнир 92 связана с рукоятью 14 с другой крепится осью к стойке 12 и к тяге 93 через ось 94 и шарнир 95. Качающиеся стойки 6 и 7 осями 22 и глав ным валом 13 опираются через xpiOHiuTей 96 и 25 и оси 20 и 21 на поворотную. платформу 1. Вспомтгательная тяга 59 через ось 62 прикреплена к стойке 63, установленной с помо.шью кронштейнов 97 и 98и осей 99. Стойка 64 связана с поворотной платформой 1 через кронштейны 1ОО к оси 1О1. Взанмодейстеие узлов экскаватора и его ковша с забоем при копании происходит следующим образом. С помощью подъемного 2 и удерживанэщеГо 3 мёх1энизмов подъемная стойка 12, рукоять 14 и качаЮшаяся стойка 6 поворачиваются так, что зубья ковша 17 опускаются на забой в нужном месте. Подкосы 8, канаты 10 и 54 (86) при Повороте стойки 12, руко яти 14 и качаюштосся стоек 6 и 7 растянуты. Экскаватор (см. фиг. 1) с ко1вшом 17, закрепленным относительно рукояти 14 тягами 15, может разрабатывать забой, копая снизу вверх . Ковш 17 с помощью подъемного 2 и удерживающего 3 механизмов в зависимости от степени.
8 разрыхленности и конфигурации забоя мо- . жет перемещаться по спиральным или поло-« гим траекториям подобно ковшам традиционного рабочего оборудования. Внедрение ковша 1-7 в забой осуществляется с помощью подъемного механизма 2 и под действием веса рабочего оборудования. Наполнение ковша 17 происходит при перемещении его от гусеницв процессе поворота рукоятки 14 относительно, главного вала 13. Величина усилий на . зубьях ковша 17 зависит от усилий в канате 10, угла между направлением этого каната и подъемной стойкой 12, т.е. от активного момента, действующего состороны подъемного 2 механизма на. по- ворачивающиеся относительно главного вала 13 подъемную стойку 12 и рукоять 14 с ковшом 17. Копание сопровождается поворотом стойки 12, относительно главного вала 13, угол между канатом 1О и стойкой 12 увеличивается, растет, и момент, действующий на рукоять 14 с ковшом 17. Поэтому усилия резания на зубья ковша по мере его перемещения вверх по забою и на больших вылетах возрастают. Это дозволяет применять ковши большей (примерна на 10.., 15%) емкости, чем на традиционных экскаваторах с Противодействующими маханй.з- мами копания.По-мере увеличения радиуса копания и усилий на зубьях ковша воз-;. растает давление на забой в направлении оси рукояти. Поворачивающаяся часть рабочего оборудования (стойки 6 и 12, тяги 15 и 51, подкосы 8, ковш 17 и др) удерживается от поворота относительно оси 2О канатом 54 и мехатйизмом 3. Чем меньше удерживающий момент на барабане 5 механизма 3 и усилие в канате 54 при копании, тем больше давление зубьев ковша на забой в направлении оси рукояти. Расчеты показьшают, что при досМточной мощности подъем- . ногр механизма 2 активные усилий в направлении забоя со сто{эоны удерживающего механизма не требуются, Протнво- . дейстане копающих механизмов исключено,, и вся мо.щн6сть подъемного механизма используется на копание. Канат 54 удерживающего механизма 3 всегда растянут. Разгрузка ковша проиаводитсй при почти горизонтальном положений рукояти 14 после открьтания днища, какji в экскаваторах с традиционным рабочим оборудованием. Подобно машинам с традиционным оборудованием экскаватор, изображенный на фиг. 1, может успешно использоваться для работы в высоких связных. и в низких забоях. Экскаватор в этом случае имеет меньше, чем известный, нагруженнык несущих конструкций, шарнирных соединений.и механизмов. При этом упрощается управление машиной при копании. Beg это позволяет повысить надежность и уменьшит вес экскаватора. Но такой экскаватор (фиг. 1) без поворотного ковша не может копать горизонтальными резами. .Этот недостато устраняется с помощью механизма для принудительнбго реверсивного поворота ковша 17 относительно рукоятки 14 (см. фиг. 6, 8, 9). При копании в нижней части забоя (см. фиг. 6) качающаяся стойка 6 поворачивается в направлении забоя, для чего с барабана 5 удержива-. щего механизма 3 сматывается, удлиняяс канат 86. Рукоять 14 поворачивается относительно главного вала 13 подъемным механизмом 2, канат Ю наматьшвГё ся на барабан 4. Привод поворота ковша 17 с помощью тормоза 39 фиксирует от вращения кривошипы 33, закрепленные н валах 34. Положение рычагов 31 стабилизируется стержнями 32 и осями 36и 53, Поворот ковша 17 вокруг оси 16 против часовой стрелки осуществляется с ромощью тяг 28 и рычагов 31 при повор те рукояти 14 относительно вала 13. В результате перемещение ковша вдоль траектории, близких к горизонтальным, сопровождается ориентацией зубьев ковщ в направлении этих траекторий, в резуль тате осуществляется копание горизонталь ными резами. В конце цикла с помощью привода поворота ковша стержни 32 с осями 36 и 53 перемещаются вниЗ| поворачивая рьиаги 31 относительно вала 13 против Часовой-стрелки, и тйги 28 перемешаясь в направлении ковша 17, разворачивают его относительно. оси 16 зубьями вверх. После наполнение ковща и поворота машины на разгрузку горная масса через открытое днище высыпается в транспор№ныв средства или в отвал. Ко йанйе и разборка высокого связного забоя осушествпяется при развернутьпс вверх зубьях ковша. Возникаюше при ко пании на ay6bSDC ковша 17 усилия резания создают момент относительно оси 1 но тяги 28, сжимаясь, удерживают уовш от разворота вниз, С помощью реверсвв ного двустороннего действия механизма поворота ковша в процессе копания может устанавливаться оптимальный для данных условий угол наклона ковша. Это позволит вести селективную разработку полезных ис копаемых. Таким образом, экскаватор может эффективно работать в любых горно-гаологических условиях. Ограничение поворота качающихся стоек 6 и вперед осуществляется с помощью тяг 58. и 59 следующим обрЕЬзом (см. фиг. 6), При повороте-вперед качающейся стойки 6 и соединенной с ней подкосами 8 другой качающейся стойки 7 угол между тягами 58 и 59 увеличивается. Поворот упомянутых стоек вперед прекращается , когда угол между тягами 58 и 59 достигает 180f В этом случае усилия, удерживающие рабочее оборудование от поворота относительно оси 20, передакугся через развернутые в прямую линию тяги 58 и 59, оси 60 и 62.,на вспомогательную стойку 63. Канат 86 и механизм 3 от удерживающих нагрузок при этом свободны. Поворот качающихся стоек 6 и 7 в обратном направлении осуществляется с помощью удерживающего механизма-И каната 86, наКлЬтываемого на вращающийся против часовой стрелки барабан 5.. Экскаватор, снабженный стержнем 71, способен создавать дополнительные усилия на зубьях ковша 17 без изменения мощности и характеристик копающих механизмов благодаря тому, что с помощью каната 79 и стержня 71 усилия удерживающего механизма 8 могут быть направлены через рукояггь 14 и ковш 17 на забой, В этом случае на барабан 5, . вращающийся по часовой стрелке, намЕьтьтается канат 79, а канат 86 сматывается. Эти канаты (см, фиг, 7) огибают в противоположных направлениях .по от|Депьным ручьям блок 69. Канат 79, огибая блоки 78 и блоки 67 (см, фиг. 6 и 7), через блок 80, обойму 82 и ось 84 связан с кронштейном 85 поворотной платформы 1, Канат 86 огибает блоки ,61, 68 (см, фиг. 7) и через кронштейн 91, оси 88 и 9О, обойму 89 и блок 87 (см. фиг. 6) крепится к поворотной платформе, Описанная система ;блоков с канатами представляет собой два двухветвевык двукратных полиспаста, каждый из которых, работает независимо от другого. Когда усилие передается г механизма 3 через канат 79, канат 86 свободен, и наоборот. Несущая часть рабочего оборудовани (кроме рукояти 14) выполнена из стерж вых конструкций, свободный от скручиваю щих и изгибающих нагрузок. Качающаяся стойка 6 свободна от полиспаста подъем ного механизма и усилиями в подъемных канатах не изгибается. Установленные в ве|ршине качающейся стойки 7 блоки 9 позволяют значительно увеличить расстоя ние до барабана 4 подъемного маханизма, что примерно в-2 раза уменьшает максимальное отклонение каната 10 от осевых плоскостей ручьев барабана 4. Долговечность каната 10 и барабана 4 увеличивается. УСИЛИЯ в ветвях подъемного каната ,10, связанных с барабаном 4 и расположенньгх на значительном расстоянии от оси 21 {фиг. 1 и 6), создают существенный момент, удерживаютий рабочее оборудование от поворота вперед Удерживающий момент, создаваемый под1 емным механизмом 2, возрастает пропорционально усилиям в Манате 1О. Используемая в машине подъемная стойка 12 вместо коробчатой подъемной раМы 2 нагружена в отличие от последней только сясатией от урнлий в йанате 10 и тяГе 51. Масса стойки 12 примерно в 3 раза меньше массы подъемной рамы Боковые нагрузки, действующие на ковш 17 при копании, и силы инерции при повороте машины передаются через рукоять 14 и главный вал 13, стойки 24, раскосы 26 и оси 2О на поворотную платфор 1. При этом на стойки 24 и раскосы 26 действуют осевые нагрузки, ВозВикшоадие на главном валу 13 от боковых нагрузок и сил инерййи пара сила передается растяжением-сжатием симмет рично относительно наклонённых подкосов 8 на вершину треугольной качаютцейсй с тойкй 7, растягивая (сжимая) ее наклоненные , которые сдентрйрое1аны Р ось симметрии схемы. На удерживающий механизм 8 указанные боковые и инерционные яагрузки не передаются, Подъемная тяга 51 (см. фиг. 4 и 10) благодаря сферическим шарнирам (фиг. 4) и 95 (фиг. 10) работает на растяжение, и крутящих (изгибаюшйх) нагрузок не воспринимает. Таким образом, несугсцие элементы рабочего оборудования предлагаемого экскаватора нагружаются при всех режимах только в осевоц продольном направлеНИИ, что позволяет эффективно использовать металл, дает возможность уменьшить массу, повысить надежность и долговечность машины. Формула изобретения 1,Экскаватор-лопата, включающий в себя поворотную платформу, ковш, удерживающий и подъемный механизм, две установленные на поворотной платформе качающиеся в вертикальной плоскости стойки, одна из которых через главный вал соединена с рукоятью ковша и подъемной стойкой, о т л и. ч а ю щ и йс я тем, что, с целью снижения массы экскаватора, энергоемкости копанкя и повышения надежности, связанная с глав- . ным валом качающаяся стойка выполнена в виде плоской .фермь и соединена с треугольной кач.ающейся стойкой сцентрированными в ее вершину и наклоненными между собой под острым углом подкосами, а в вершине треугольной стойки установлены блоки, огибаемые канатом подъемйого механизма. 2,ЗНскаватор-лопата по п, 1, о тличающийся тем, что , с целью ограничения кинематики поворота качаюЩИ.ХСЯ стоек вперед, на поворотной платформе установлена вспомогательная стойКа, соединенная со связанными между собой через ось вспомогательными тягами, одна из которых связана с вершиной треугольной качающейся стойки, при этом ось, соедийшощая вспомогательные тяги, связана с канатом удерживающего.маха- низма, & длина вспомогательных тяг выб- рана такой чтЬпрн повороте качающихся стоек В крайнее переднее положение угол , между вспомогательными тягами равен 180°, , / -. -.. - 3,Экскаватор-лопйта по п. 2, о тл и а Ю Ш в и с я тем, что, с целью дополнительаого увеличения усилий резания, вспомЬг тепьные тяги соединены cct. снабженным € локами напорным CTapHHeMJ опирающнкжя на седло, установленное вместе с другими блоками, огибаеш 1ми канатами удержйв ающего Механизма, на оси, эакрейлеййой к поворотной платфорМе удерживающей стойки, 4,Экскаватор-лопата по пп, 1-3, о тл и ч а к Й.с я тем, что, с целью принудительногоповорота ковша относительно рукояти, йиже крепления рукойти к ковшу, связанному с подъемной тягой, присоединены тяги, соединенные через установленные на главном валу рычаги второго рода со стержнями, связывающими кривошипы размещенного на пово- ротной платформе реверсивного механизма. Источники информации, принятые во внимание при экспертизе 1 Авторское свидетельство CCCf № 281269, кл. Е 02 F 3/38, 1969. 2. Патент США № 3501034, кл. 214-138, опублик. 1970.
Ш-fe:
.- SSS te«a,---r
663785
gf/g В
фиг. If,
S iiaasfe- ; :: :.
-I---- (f
69 67
7 75 66
т :ioih-
- E
