Изобретение относится к сельскому хозяйству, а именно к ленточным консольным конвейерам для автоматической загрузки бунтов хлопка-сырца на заготовительных хлопкопунктах.
Цель изобретения - повышение произ- 5 водительности технологического процесса загрузки бунта.
На фиг. 1 изображено устройство для загрузки хлопка-сырца в бунт, общий вид;
его постоянное линейное перемещение по вертикали, т.е. реле 12 времени изменяет свой временной интервал включения механизма 13 подъема конвейера 1 таким образом, чтобы обеспечить постоянное линейное перемещение его конца в вертикальной плоскости. Ползунок резистора 14 механически соединен с механизмом 13 подъема загрузочного конвейера.
Второй элемент 15 и элемент И
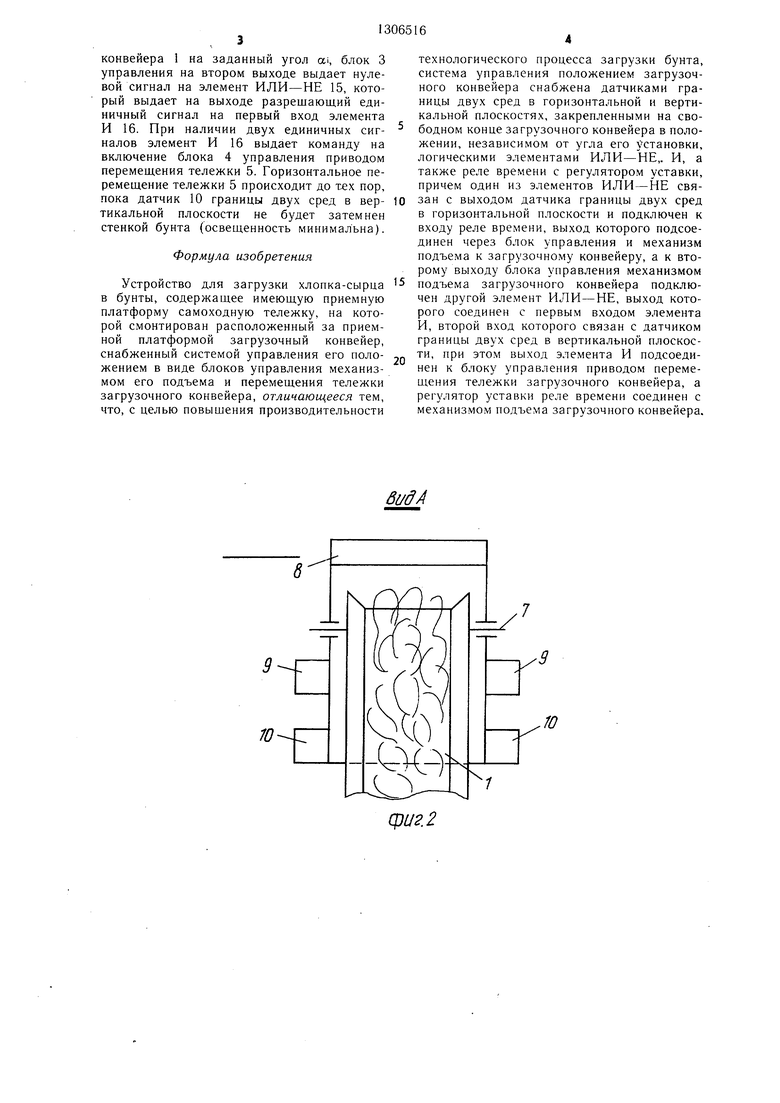
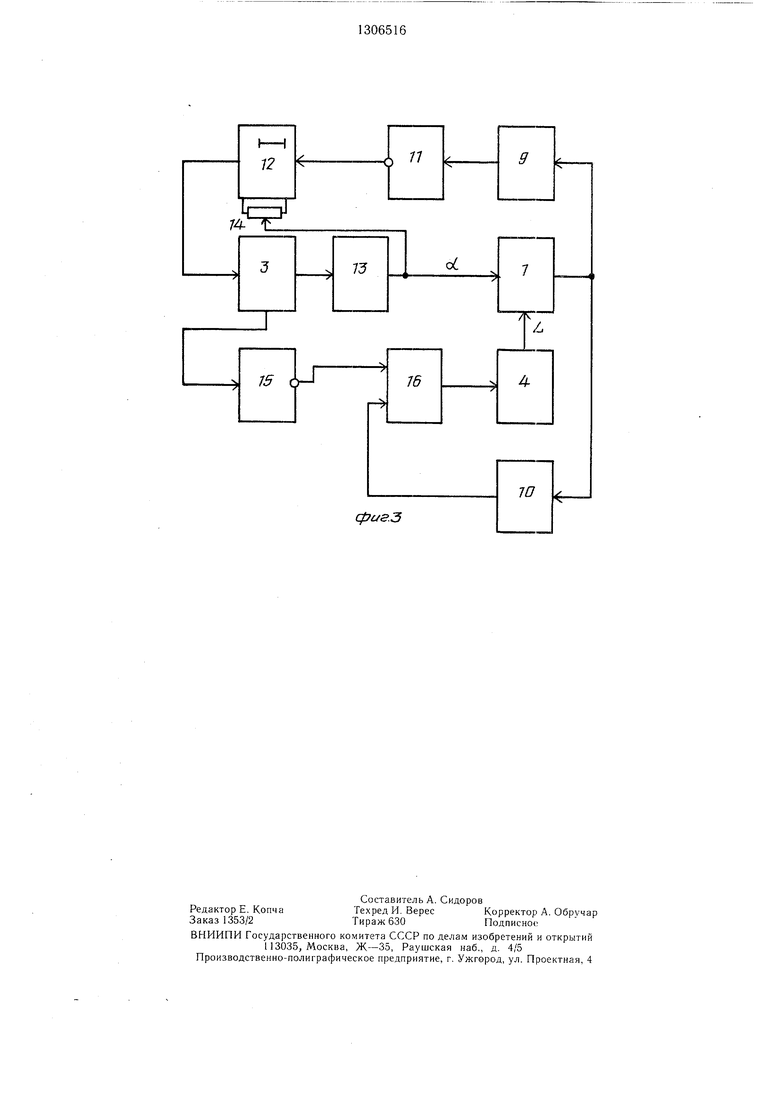
на фиг. 2 - вид А на фиг. 1; на фиг. 3 - ю 16 исключают одновременное включение меструктурная схема системы управления.
Устройство для загрузки хлопка-сырца в бунты содержит ленточный конвейер 1, имеющий размещенную на опорных башмаках приемную платформу 2 с механизмом подъеханизма 13 подъема конвейера 1 и привода перемещения тележки 5, а также управляют приводом перемещения тележки 5. Таким образом, средства автоматики обеспечивают шаговое перемещение сво20
конвейере.
Устройство для загрузки хлопка-сырца в бунты работает следующим образом.
Загрузочный конвейер 1 устанавливают свободным концом перпендикулярно будущей стенке бунта (площадки под бунты размечены). Хлопок-сырец сбрасывается на поверхность бунта, разбрасывается и утаптывается рабочими. По мере увеличения выма и фиксации относительно опорных баш- 15 бодного конца конвейера по мере засыпки маков (не показаны), блок 3 упраЕ)ления бунта без остановки подачи хлопка-сырца на подъемом конвейера 1, блок 4 управления приводом перемещения тележки 5 загрузочного конвейера 1. На свободном конце конвейера 1 укреплена рама 6 на опорах 7 барабана. Рама 6 установлена с возможностью сохранения своего вертикального положения независимо от угла наклона а конвейера 1. На верхней части рамы закреплен осветитель 8, обеспечивающий в ночное время заданную освещенность на поверх- 25 соты бунта изменяется сигнал на датчике ности бунта, а на нижней - две группы по- границы двух сред в горизонтальной плос- парно установленных фотодатчиков 9 и 10 кости. Условием срабатывания, например, границы двух сред соответственно в гори- фотодатчиков является порог освещенности зонтальной и вертикальной плоскостях. В на поверхности и стенке бунта. В светлое качестве датчиков могут быть применены время суток эта освещенность определяется фотореле ФР 800 или радиационные уровне- 30 естественным светом, а ночью - за счет ос- меры. Выход датчика 9 границы двух сред ветителя 8.
в горизонтальной плоскости соединен с эле-При определенном уровне насыпки бунта
ментом ИЛИ-НЕ 11, выход которого связан фотодатчик 9 не воспринимает отраженный с реле 12 времени. Выход последнего под- от поверхности хлопка-сырца световой сиг- ключен к блоку 3 управления подъемом нал и на его выходе появляется сигнал конвейера 1, при этом выход блока 3 связан 35 «Ноль. Элемент ИЛИ-НЕ 11 преобразует с конвейером 1 через механизм 13 его подъе- его в единичный сигнал управления реле ма, выход механизма 13 также соединен с 12 времени, которое включает блок 3 уп- ползуном нелинейного резистора 14, пред- равления приводом подъема конвейера 1 ставляющего собой регулятор уставки реле на определенный промежуток времени 12 времени. Второй выход блока 3 управ- ,,, (угол подъема ai). С подъемом конвейера 1
ления подъемом через элемент ИЛИ-НЕ 15 подключен к первому входу элемента И 16, к второму входу которого подсоединен датчик 10 границы двух сред в вертикальной плоскости, а выход элемента И 16 подключен к
датчик 9 снова на выходе формирует сигнал «Единица, что не оказывает влияния на работу реле 12 времени, так как оно выбрано для реализации «Выдержка времени на пропадание сигнала. Одновременно
датчик 9 снова на выходе формирует сигнал «Единица, что не оказывает влияния на работу реле 12 времени, так как оно выбрано для реализации «Выдержка времени на пропадание сигнала. Одновременно
блоку 4 управления приводом (не показан) 45 в реле 12 времени введена поправка на перемещения тележки 5.уставку времени исходя из угла наклона
Датчики 9 и 10 границы двух сред фор- конвейера 1 за счет связи механизма 13 подъе- мируют для системы управления сигналы о ма конвейера 1 с нелинейным резистором заполнении бунта, о величине угла подъема14. Элемент ИЛИ-НЕ 15 в этот момент
конвейеров и перемещения тележки 5 за- выдает на элемент И 16 запрещающий сиг- грузочного конвейера 1, чем обеспечивается 50 нал «Ноль, заданная выcota свободного конца конвейера 1 над поверхностью бунта.
Элемент ИЛИ-НЕ 11 с реле 12 времени обеспечивает управление механизмом 13 подъема конвейера 1. Резистор 14 реле времени 12 (регулятор уставки) имеет нелинейную характеристику, зависящую от угла наклона а конвейера 1, что обеспечивает
55
Таким образом, в первый момент времени стрела конвейера 1 перемещается на угол Да.
После этого на датчике границы двух сред в вертикальной плоскости появляется сигнал «Единица (так как он будет освещен), который поступает на вход элемента И 16. Как только закончится подъем
его постоянное линейное перемещение по вертикали, т.е. реле 12 времени изменяет свой временной интервал включения механизма 13 подъема конвейера 1 таким образом, чтобы обеспечить постоянное линейное перемещение его конца в вертикальной плоскости. Ползунок резистора 14 механически соединен с механизмом 13 подъема загрузочного конвейера.
Второй элемент 15 и элемент И
16 исключают одновременное включение механизма 13 подъема конвейера 1 и привода перемещения тележки 5, а также управляют приводом перемещения тележки 5. Таким образом, средства автоматики обеспечивают шаговое перемещение свободного конца конвейера по мере засыпки бунта без остановки подачи хлопка-сырца на соты бунта изменяется сигнал на датчике границы двух сред в горизонтальной плос- кости. Условием срабатывания, например, фотодатчиков является порог освещенности на поверхности и стенке бунта. В светлое время суток эта освещенность определяется естественным светом, а ночью - за счет ос- ветителя 8.
конвейере.
Устройство для загрузки хлопка-сырца в бунты работает следующим образом.
Загрузочный конвейер 1 устанавливают свободным концом перпендикулярно будущей стенке бунта (площадки под бунты размечены). Хлопок-сырец сбрасывается на поверхность бунта, разбрасывается и утаптывается рабочими. По мере увеличения выбодного конца конвейера по мере засыпки бунта без остановки подачи хлопка-сырца на соты бунта изменяется сигнал на датчике границы двух сред в горизонтальной плос- кости. Условием срабатывания, например, фотодатчиков является порог освещенности на поверхности и стенке бунта. В светлое время суток эта освещенность определяется естественным светом, а ночью - за счет ос- ветителя 8.
датчик 9 снова на выходе формирует сигнал «Единица, что не оказывает влияния на работу реле 12 времени, так как оно выбрано для реализации «Выдержка времени на пропадание сигнала. Одновременно
в реле 12 времени введена поправка на уставку времени исходя из угла наклона
выдает на элемент И 16 запрещающий сиг- 50 нал «Ноль,
55
Таким образом, в первый момент времени стрела конвейера 1 перемещается на угол Да.
После этого на датчике границы двух сред в вертикальной плоскости появляется сигнал «Единица (так как он будет освещен), который поступает на вход элемента И 16. Как только закончится подъем
конвейера 1 на заданный угол ai, блок 3 управления на втором выходе выдает нулевой сигнал на элемент ИЛИ-НЕ 15, который выдает на выходе разрешающий единичный сигнал на первый вход элемента И 16. При наличии двух единичных сиг- налов элемент И 16 выдает команду на включение блока 4 управления приводом перемещения тележки 5. Горизонтальное перемещение тележки 5 происходит до тех пор,
технологического процесса загрузки бунта, система управления положением загрузочного конвейера снабжена датчиками границы двух сред в горизонтальной и вертикальной плоскостях, закрепленными на свободном конце загрузочного конвейера в положении, независимом от угла его установки, логическими элементами ИЛИ-НЕ,. И, а также реле времени с регулятором уставки, причем один из элементов ИЛИ-НЕ святикальной плоскости не будет затемнен стенкой бунта (освещенность минимальна).
Формула изобретения
пока датчик 10 границы двух сред в вер- 10 зан с выходом датчика границы двух сред
в горизонтальной плоскости и подключен к входу реле времени, выход которого подсоединен через блок управления и механизм подъема к загрузочному конвейеру, а к второму выходу блока управления механизмом Устройство для загрузки хлопка-сырца подъема загрузочного конвейера подклю- в бунты, содержащее имеющую приемную чен другой элемент ИЛИ-НЕ, выход кото- платформу самоходную тележку, на которой смонтирован расположенный за приемной платформой загрузочный конвейер, снабженный системой управления его поло- ,,, ти, при этом выход элемента И подсоеди- жением в виде блоков управления механиз- нен к блоку управления приводом перемерого соединен с первым входом элемента И, второй вход которого связан с датчиком границы двух сред в вертикальной плоскосмом его подъема и перемещения тележки загрузочного конвейера, отличающееся тем, что, с целью повышения производительности
технологического процесса загрузки бунта, система управления положением загрузочного конвейера снабжена датчиками границы двух сред в горизонтальной и вертикальной плоскостях, закрепленными на свободном конце загрузочного конвейера в положении, независимом от угла его установки, логическими элементами ИЛИ-НЕ,. И, а также реле времени с регулятором уставки, причем один из элементов ИЛИ-НЕ свяв горизонтальной плоскости и подключен к входу реле времени, выход которого подсоединен через блок управления и механизм подъема к загрузочному конвейеру, а к второму выходу блока управления механизмом подъема загрузочного конвейера подклю- чен другой элемент ИЛИ-НЕ, выход кото- ти, при этом выход элемента И подсоеди- нен к блоку управления приводом перемерого соединен с первым входом элемента И, второй вход которого связан с датчиком границы двух сред в вертикальной плоскосщения тележки загрузочного конвейера, а регулятор уставки реле времени соединен с механизмом подъема загрузочного конвейера.
Ю
фи2.2
фие.З
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая линия формования и сушки керамических изделий | 1978 |
|
SU764985A1 |
| Передвижное устройство для перегрузки хлопка-сырца | 1977 |
|
SU734033A2 |
| МЕХАНИЧЕСКИЙ ПИТАТЕЛЬ | 1963 |
|
SU158238A1 |
| Машина для очесывания и разборки хлопкового бунта | 1982 |
|
SU1060141A1 |
| Бунтоукладчик хлопка-сырца | 1986 |
|
SU1387906A1 |
| Устройство для измерения температуры | 1978 |
|
SU866420A1 |
| Укладчик хлопка-сырца в бунты | 1978 |
|
SU897676A1 |
| Устройство автоматического контроля веса материала в бункерах | 1985 |
|
SU1255870A1 |
| Передвижной укладчик хлопка-сырца в бунты на площадке | 1985 |
|
SU1468467A1 |
| Устройство для разборки хлопкового бунта | 1981 |
|
SU1043199A1 |
Изобретение относится к области сельского хозяйства, а именно к ленточным консольным конвейерам для автоматической загрузки бунтов хлопка-сырца на заготовительных хлопкопунктах. Целью изобретения является повышение производительности технологического процесса загрузки бунта. При работе устройства загрузочный конвейер 1 устанавливают свободным концом перпендикулярно стенке бунта. При определенном уровне насыпки бунта фотодатчик 9 не воспринимает отраженный от поверхности хлопка-сырца световой сигнал и на его выходе появляется сигнал «Ноль. Элемент ИЛИ-НЕ преобразует его в единичный сигнал управления реле времени, которое включит блок 3 управления приводом подъема конвейера 1 на определенный промежуток времени. Одновременно в реле времени введена поправка на уставку времени исходя из угла наклона конвейера 1 за счет связи механизма 13 подъема с нелинейным резистором. Элемент ИЛИ-НЕ в этот момент выдает на элемент И запрещающий сигнал «Ноль. После перемещения конвейера 1 на определенный угол на фотодатчике 10 границы двух сред в вертикальной плоскости появится сигнал «Единица, который поступит на вход элемента И. Как только закончится подъем стрелы на заданный угол ai, блок 3 управления на втором выходе выдаст нулевой сигнал на другой элемент ИЛИ-НЕ, который выдаст разрешающий единичный сигнал на первый вход элемента И. При наличии двух единичных сигналов элемент И выдаст команду на включение блока 4 управления приводом перемещения тележки 5, горизонтальное перемещение которой будет происходить до тех пор, пока фотодатчик 10 границы двух сред в вертикальной плоскости не будет затемнен стенкой бунта. 3 ил. i (Л СА:) о Oi СП О5 фиг1
| Погрузочная машина | 1957 |
|
SU113067A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
| Тартуский завод сельхозмашин «Выйт, 1976, с | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
