ЛИЯ. На рабочем столе 14 установлены коллекторы 17 с форсунками для подачи любой технологической среды или магнитострикционные преобразователи для ультразвуковой обработки. По окончании обработки рабочий стол 14 с изделием поднимается до упора в держатель 10, Робот устанавливает необработанное изделие на верхнюю поверхность держателя 10. Срабатывает элекt
Изобретение относится к очистке изделий от загрязнений.
Цель изобретения - повышение производительности.
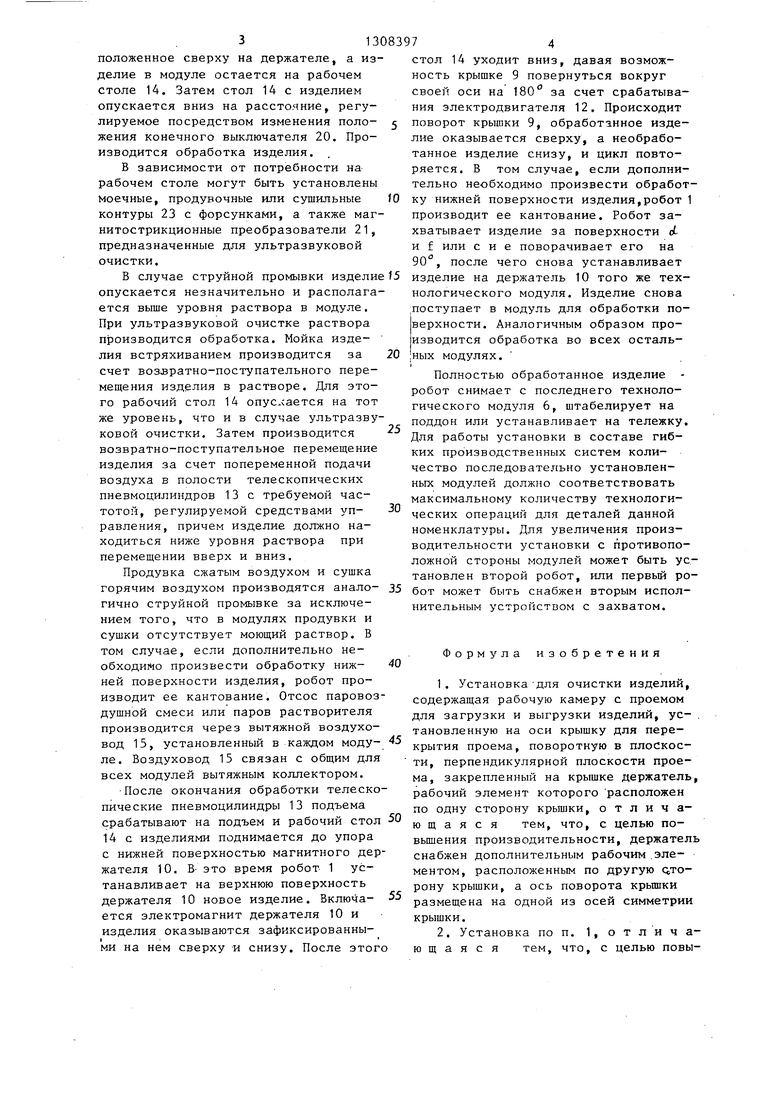
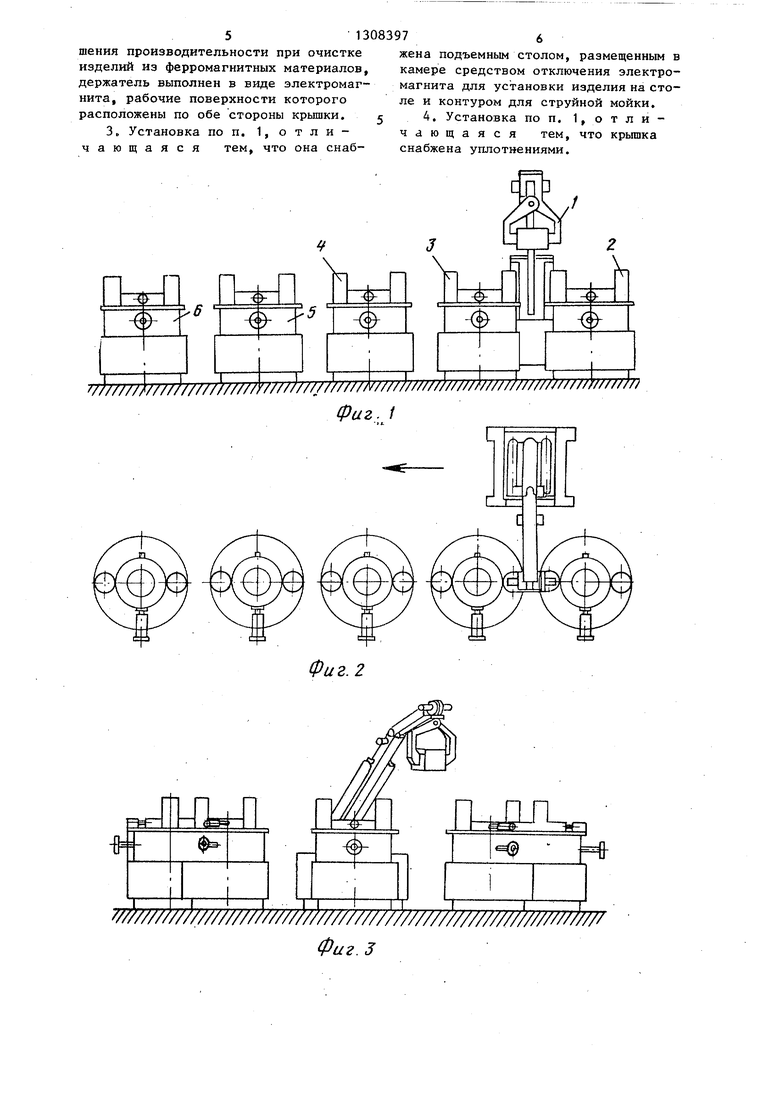
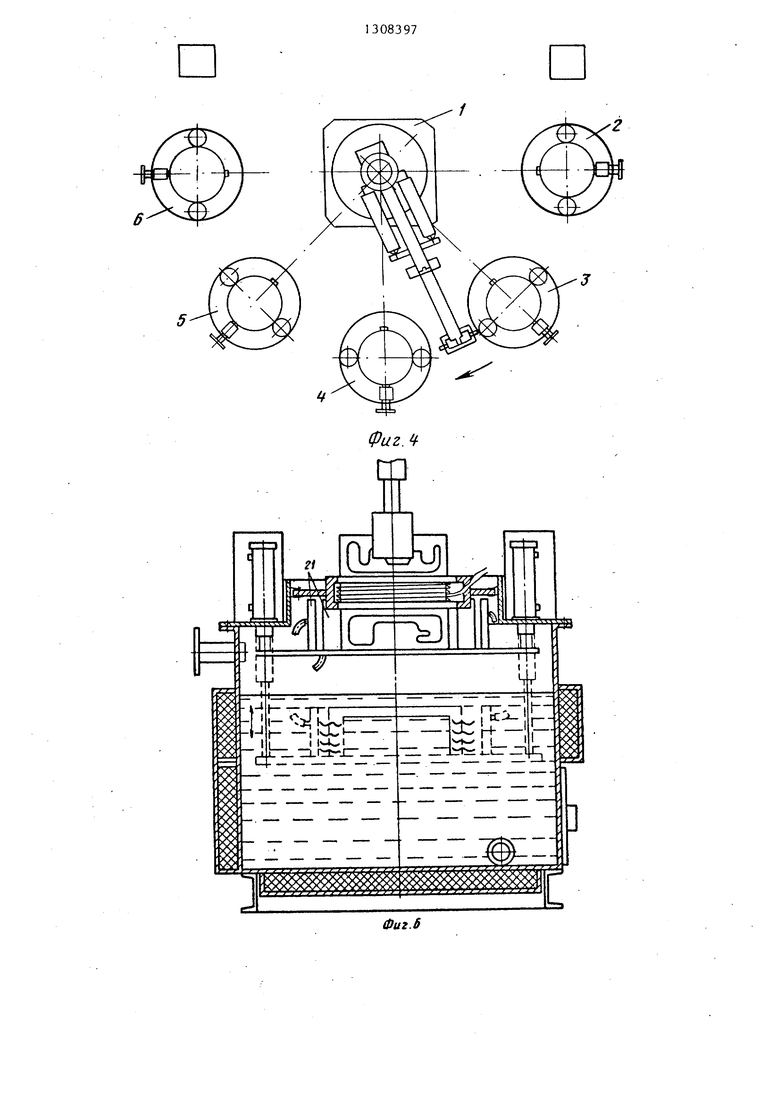
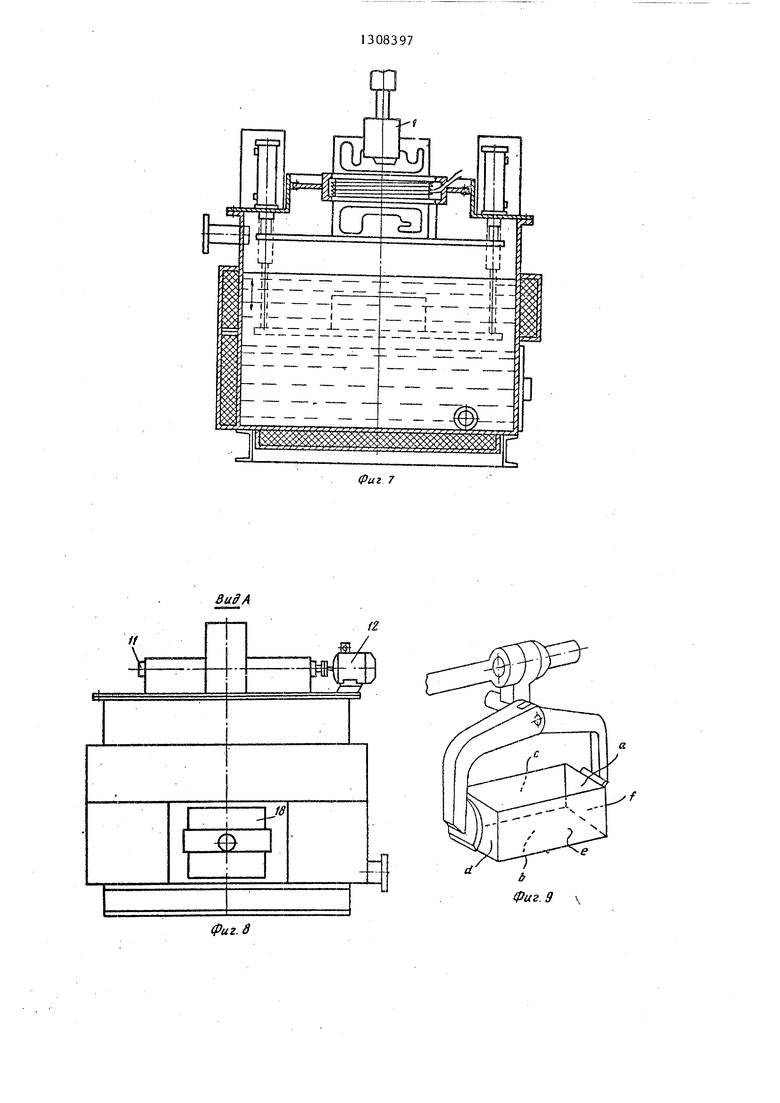
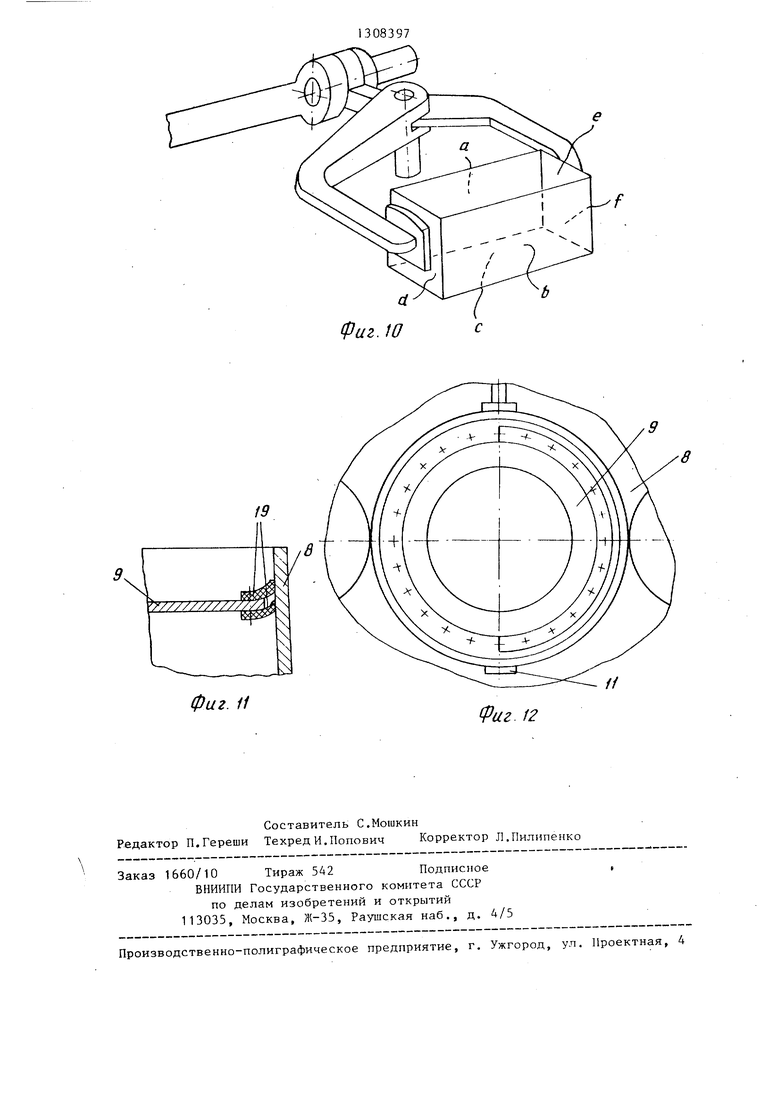
На фиг, 1-4 изображены схемы возможных вариантов компоновки установки; на фиг, 5 - технологический модуль струйной очистки; на фиг, 6 - технологический модуль ультразвуково очистки-, на фиг, 7 - технологический модуль обработки встряхиванием на фиг, 8 - вид А на фиг, 5 на фиг, 9 и 10 - схемы кантования изделия; на фиг, 11 - уплотнение поворотной крышки технологического модуля; на фиг,12 технологический модуль, вид сверху.
Установка для очистки изделий состоит из робота 1 и набора технологических модулей 2-6, Каждый технологический модуль, состоит из теплоизолированного корпуса 7 цилиндрической формы, закрытого сверху колпаком 8, на котором установлены поворотная крышка 9 с магнитным держателем 10 изделий, опорами 11 и электродвигателем 12 и телескопических пневмоци- линдров 13 подъема с рабочим столом 14. Колпак 8 посредством фланца соединен с корпусом 7, В корпусе 7 предусмотрен вытяжной воздуховод 15,. сливной патрубок 16, коллектор 17 для подачи технологической среды и люк 18 для очистки днища модуля от шлама. Уплотнение поворотной крышки 9 осуществляется посредством двух резиновых уплотнений 19, Положение стола 14 определяется конечным выключателем 20, Для ультразвуковой очистки применяют магнитострикционные преобразователи 2 1 , Коллектор 17 соединен с системой подачи рабочего агентромагнит, и изделие оказывается зафиксированными на нем. Рабочий стол 14 опускается, а держатель, обращенный свободной поверхностью вверх, готов для приема следующего изделия. Таким образом цикл повторяется. Сокращение времени на погрузку и выгрузку изделия позволяет повысить производительность установки. 3 з,п, ф-лы, 12 ил.
.5
0
5
0
5
0
та посредством гибких рукавов 22, На внутренней поверхности колпака 8 смонтированы крепления для установки на них контура 23 тороидальной формы с форсунками, предназначенного для обработки внешней поверхности изделия.
Установка работает следующим образом.
Производится считывание закодированного обозначения изделия, нанесенного на спутники или непосредственно на изделия, сканирующим устройством, расположенным на исполнительном устройстве робота. Затем в соответствии с заложенной в управляющее устройство программой реализуется требуемая последовательность технологических операций.
Робот 1 забирает изделие или спутник с изделиями со штабелями изделия или с тележки, подает его на первый технологический модуль 2 и устанавливает его на магнитный держатель 10 поворотной крышки 9, Срабатывает электромагнит держателя 10 и изделие фиксируется на нем. Затем срабатывает электродвигатель 12 поворота крышки 9, происходит поворот ее на 180 в опорах 11 и изделие оказывается внутри модуля подвешенным на магнитном держателе 10„ После поворота крышки 9 снаружи модуля на держателе 10 оказывается изделие уже подвергнутое обработке в модуле. Срабатывают телескопические пневмоцилиндры 13 подъема и рабочий стол 14 поднимается до
упора в подвешенное на магнитном держателе -10 изделие, после чего отключается электромагнит держателя 10, позволяя роботу забрать изделие,расположенное сверху на держателе, а делие в модуле остается на рабочем столе 14. Затем стол 14 с изделием опускается вниз на расстояние, регулируемое посредством изменения положения конечного выключателя 20. Производится обработка изделия.
В зависимости от потребности на рабочем столе могут быть установлены Моечные, продувочные или сушильные контуры 23 с форсунками, а также маг нитострикционные преобразователи 21, предназначенные для ультразвуковой очистки.
из
В случае струйной промывки изделие 15 изделие на держатель 10 того же
опускается незначительно и располагается вьше уровня раствора в модуле. При ультразвуковой очистке раствора производится обработка. Мойка изде- ЛИЯ встряхиванием производится за счет возозратно-поступательного перемещения изделия в растворе. Для этого рабочий стол 14 опус.сается на тот же уровень, что и в случае ультразвуковой очистки. Затем производится возвратно-поступательное перемещение изделия за счет попеременной подачи воздуха в полости телескопических пневмоцилиндров 13 с требуемой частотой, регулируемой средствами управления, причем изделие должно находиться ниже уровня раствора при перемещении вверх и вниз.
Продувка сжатым воздухом и сушка горячим воздухом производятся аналогично струйной промывке за исключением того, что в модулях продувки и сушки отсутствует моющий раствор. В том случае, если дополнительно необходимо произвести обработку нижней поверхности изделия, робот производит ее кантование. Отсос паровоздушной смеси или паров растворителя производится через вытяжной воздуховод 15, установленный в каждом модуле. Воздуховод 15 связан с общим для всех модулей вытяжным коллектором.
После окончания обработки телескопические пневмоцилиндры 13 подъема срабатывают на подъем и рабочий стол 14 с изделиями поднимается до упора с нижней поверхностью магнитного держателя 10. В- это время робот 1 устанавливает на верхнюю поверхность держателя 10 новое изделие. Включается электромагнит держателя 10 и изделия оказываются зафиксированными на нем сверху и снизу. После этог
83974
стол 14 уходит вниз, давая возможность крышке 9 повернуться вокруг своей оси на 180 за счет срабатывания электродвигателя 12. Происходит 5 поворот крышки 9, обработанное изделие оказывается сверху, а необработанное изделие снизу, и цикл повторяется. В том случае, если дополнительно необходимо произвести обработ- Ш ку нижней поверхности изделия,робот 1 производит ее кантование. Робот захватывает изделие за поверхности о(. и f или сие поворачивает его на 90, после чего снова устанавливает
тех0
5
0
5
нологического модуля. Изделие снова поступает в модуль для обработки поверхности. Аналогичным образом производится обработка во всех остальных модулях.
Полностью обработанное изделие робот снимает с последнего технологического модуля 6, штабелирует на поддон или устанавливает на тележку. Для работы установки в составе гибких производственных систем количество последовательно установленных модулей должно соответствовать максимальному количеству технологических операций для деталей данной номенклатуры. Для увеличения производительности установки с противоположной стороны модулей может быть установлен второй робот, или первый робот может быть снабжен вторым исполнительным устройством с захватом.
Формула изобретения
1.Установка для очистки изделий, содержащая рабочую камеру с проемом для загрузки и выгрузки изделий, ус- . тановленную на оси крышку для перекрытия проема, поворотную в плоскости, перпендикулярной плоскости проема, закрепленный на крышке держатель, рабочий элемент которого расположен по одну сторону крышки, отличающаяся тем, что, с целью по- вьш1ения производительности, держатель снабжен дополнительным рабочим .элементом, расположенным по другую рону крышки, а ось поворота крьшки размещена на одной из осей симметрии крышки.
2.Установка по п. 1, о т л и ч а- ю щ а я с я тем, что, с целью повышения производительности при очистке изделий из ферромагнитных материалов, держатель выполнен в виде электромагнита, рабочие поверхности которого расположены по обе стороны крышки. 3„ Установка по п. 1, о т л и - чающаяся тем, что она снабфиг. 1
жена подъемным столом, размещенным в камере средством отключения электромагнита для установки изделия на столе и контуром для струйной мойки.
4. Установка по п. 1, о т л и - чающаяся тем, что крьппка снабжена уплотнениями.
Фиг. 2
f/ /////}////////////)
7/////////////////////////////////////////////// Фаг. 3
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для очистки изделий | 1987 |
|
SU1558519A1 |
| Установка для очистки изделий | 1987 |
|
SU1493328A1 |
| Роботизированное устройство для прошивки и обработки отверстий в изделии | 2023 |
|
RU2824368C1 |
| Установка для струйной мойки изделий | 1990 |
|
SU1768324A1 |
| Установка для струйной очистки изделий | 1988 |
|
SU1542645A1 |
| ДИСТАНЦИОННО УПРАВЛЯЕМЫЙ МОБИЛЬНЫЙ РОБОТ, ВИДЕОКАМЕРА МОБИЛЬНОГО РОБОТА, ЗВУКОПРИЕМНАЯ СИСТЕМА САМОНАВЕДЕНИЯ МОБИЛЬНОГО РОБОТА, СФЕРИЧЕСКАЯ ГРАНАТА | 2011 |
|
RU2473863C1 |
| Установка для мойки и обезжиривания изделий | 1986 |
|
SU1416216A1 |
| Автоматизированная линия для сборки и сварки коробчатых изделий | 1987 |
|
SU1581543A1 |
| Установка тупикового типа для очистки изделий | 1990 |
|
SU1824245A1 |
| КАРУСЕЛЬНАЯ МОЕЧНО-СУШИЛЬНАЯ УСТАНОВКА | 1991 |
|
RU2022674C1 |
Изобретение позволяет повысить производительность очистки за счет того, что при работе установки робот 1 устанавливает изделие на маг- нитный держатель 10 крышки 9 модуля. Электромагнит держателя осуществляет фиксацию изделия. В результате срабатывания электродвигателя поворота крышки 9, она поворачивается на 180, изделие оказывается подвешенным снизу. Рабочий стол 14, приводимый в движение пневмоцилиндрами 13, поднимается до упора в изделие. Отключается электромагнит, изделие остается на рабочем столе 14. Стол 14 опускается и производится обработка изде(Л г со о СХ5 со СО -si
11
Фиг. 9
Фиг. W
фиг. 11
Фиг 12
| Установка для очистки изделий | 1984 |
|
SU1248679A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
