6}.6f °
Ю
СО
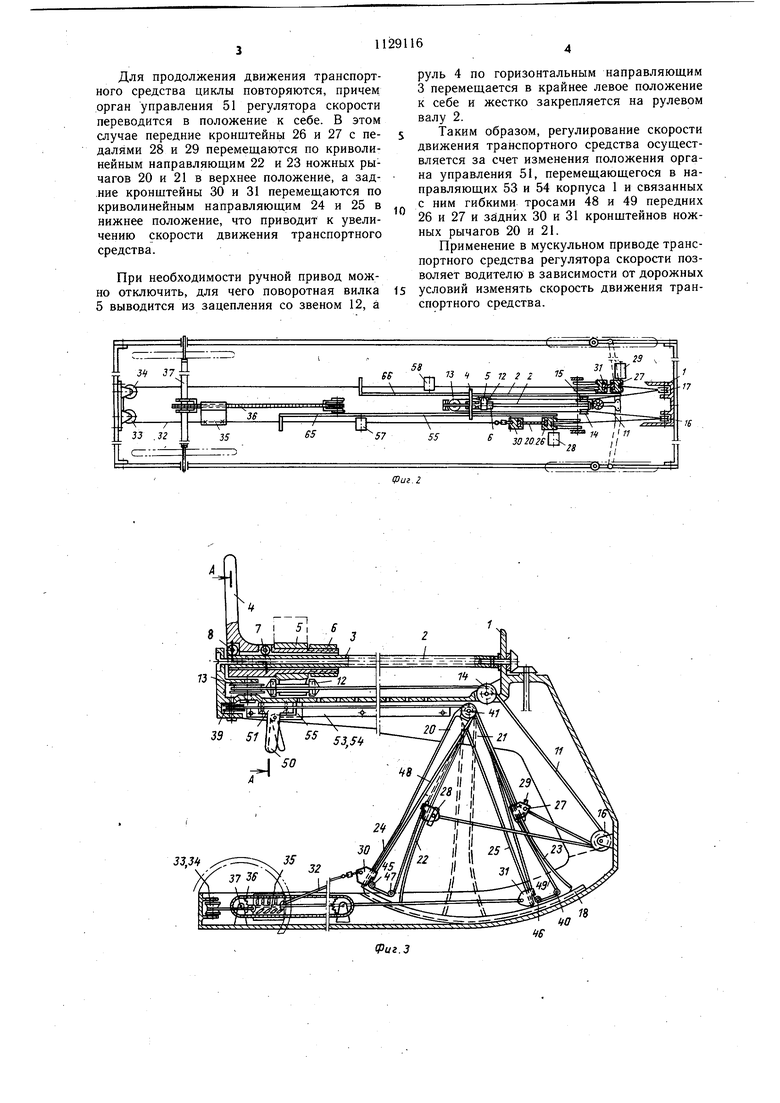
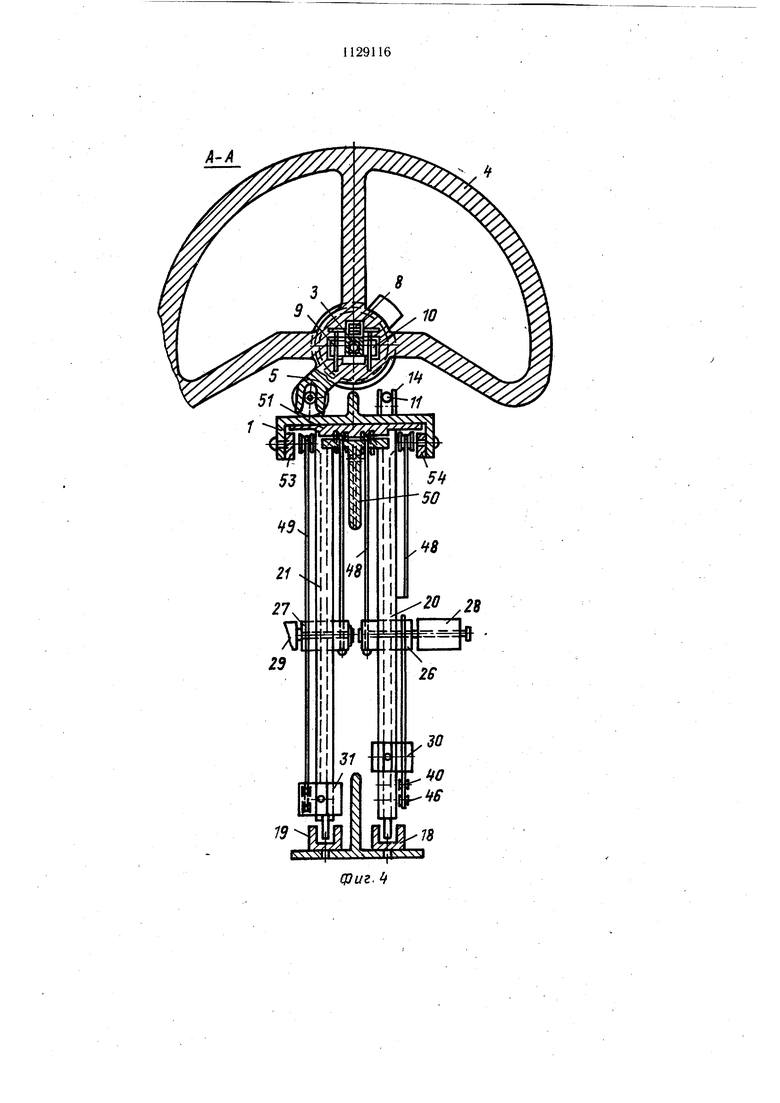
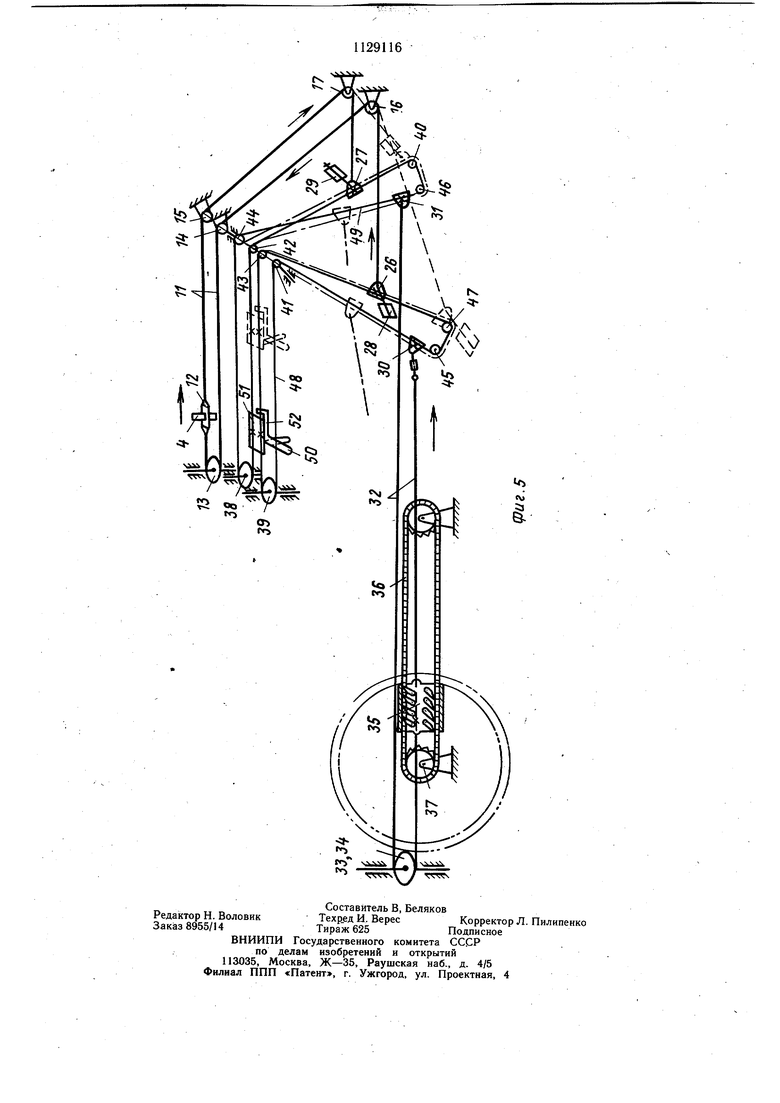
О5 л Изобретение относится к транспортным средствам, приводимым в действие мускульной силой человека. Известен мускульный привод транспортного средства, содержащий ручной привод с корпусом, установленный на горизонтальных направляющих рулевого вала, и ножной привод, имеющий ножные рычаги с педалями, выполненные с возможностью возвратно-поступательного движения, связанные гибкой тягой через муфту свободного хода с ведущим валом 1.. Недостатком данного устройства является невозможность увеличения скорости движения. Цель изобретения -увеличение скороети движения транспортного средства. Поставленная цель достигается тем, что мускульный привод транспортного средства, содержащий ручной привод с корпусом, установленный на горизонтальных направляющих рулевого вала, и ножной привод, имеющий ножные рычаги с педалями, выполненные с возможностью возвратно-поступательного движения, связанные гибкой тягой через муфту свободного хода с ведущим валом, снабжен регулятором скорости, выполненным в виде роликов, размещенных на нижнем и верхнем концах ножных рычагов и корпусе ручного привода, двух пар подвижных передних и задних кронщтейнов, каждая из которых размещена на криволинейных направляющих ножного рычага, двух замкнутых ветвей гибких тросов, каждая из которых через ролики соединена с передним кронщтейном с закрепленной на нем педалью и задним кронщтейном, направляющие, выполненные в корпусе ручного привода, в которых размещен руль, выполненный в виде полукольца с поворотной фиксирующей вилкой, соединенного замкнутой гибкой тягой через ролики с ножными рычагами и органом управления, выполненным с возможностью перемещения и фиксирования в указанных направляющих. На фиг. 1 изображен мускульный привод транспортного средства, вид сбоку; на фиг. 2 - то же, вид сверху; на фиг. 3 - ручной и ножной приводы транспортного средства; на фиг. 4 - сечение А-А на фиг. 3; на фиг. 5 - кинематическая схема мускульного привода транспортного средства. Мускульный привод транспортного средства содержит ручной привод, состоящий из корпуса 1, на котором установлен рулевой вал 2 с горизонтальными направляющими 3, руль 4 с поворотной вилкой 5, фиксатор б и ролики 7-10, трос 11 с закрепленным на нем звеном 12, охватывающий установленные на корпусе 1 ролики 13-17, Ножной привод, состоящий из перемещающихся в направляющих желобах 18 и 19 ножных рычагов 20 и 21 с криволинейными направляющими 22-25, передних кронщтейнов 26 И 27 С педалями 28 и 29, к которым присоединен трос 11, и задних кронштейнов 30 и 31, соединенных гибкой тягой 32 через обводные ролики 33 и 34 и муфту свободного хода, выполненную в виде реверсивного механизма 35 и цепной передачи 36, с ведущим валом 37. Регулятор скорости, выполненный в виде размещенных на ножных рычагах 20 и 21 и корпусе 1 роликов 38-47 и охватывающих их- гибких тросов 48 и 49, соединенных с передними кронштейнами 26 и 27, задними кронщтейнами 30 и 31 и ручкой 50 органа 51 управления со стопорным рычагом 52, установленного на направляющих 53 и 54, выполненных в корпусе 1. В варианте «тандем мускульный привод снабжен дополнительными тягами 55 и 56 и педалями 57 и 58, установленными накронщтейнах 59 и 60 с роликами 61 и 62, перемещающимися по горизонтальным направляющим 63 и 64, и съемными рукоятками 65 и 66. Мускульный привод работает следующим образом. Перед началом движения орган 51 управления регулятора скорости перемещается в направляющих 53 и 54 в крайнее переднее положение от себя и фиксируется стопорным рычагом 52 в корпусе 1. Одновременно соединенные посредством гибких тросов 48 и 49 с ручкой 50 органа 51 управления передние кронщтейны 26 и 27 с педалями 28 . и 29 перемещаются по криволинейным направляющим 22 и 23 ножных рычагов 20 и 21 в нижнее положение, а задние кронщтейны 30 и 31 с прикрепленной к ним гибкой тягой 32 перемещаются в верхнее положение по криволинейным направляющим 24 и 25. Поворотная вилка 5 опускается и входит в зацепление со звеном 12, связывая тем самым руль 4 с тросом 11 ручного привода. При нажатии на правую педаль 28 и одновременном перемещении руля 4 от себя, правый ножной рычаг 20 перемещается вперед. Усилие через связанную с задним кронщтейном 30 гибкую тягу 32 передается на реверсивный механизм 35 и посредством цепной передачи 36 на ведущий вал 37, который вращается. Таким образом, транспортное средство движется. При перемещении правого ножного рычага 20 вперед кинематически связанный с ним гибкой тягой 32 через обводные ролики 33 и 34 левый ножной рычаг 21 отходит назад в исходное положение. При нажатии на левую педаль 29 и одновременном перемещении руля 4 к себе, левый ножной рычаг 21 перемещается вперед, а усилие через гибкую тягу 32, обводные ролики 33 и 34 передается на реверсивный механизм 35 и с помощью цепной передачи 36 на ведущий вал 37.
Для продолжения движения транспортного средства циклы повторяются, причем орган управления 51 регулятора скорости переводится в положение к себе. В этом случае передние кронштейны 26 и 27 с педалями 28 и 29 перемещаются по криволинейным направляющим 22 и 23 ножных рычагов 20 и 21 в верхнее положение, а зад.ние кронштейны 30 и 31 перемещаются по криволинейным направляющим 24 и 25 в нижнее положение, что приводит к увеличению скорости движения транспортного средства.
При необходимости ручной привод можно отключить, для чего поворотная вилка 5 выводится из зацепления со звеном 12, а
руль 4 по горизонтальным направляющим 3 перемещается в крайнее левое положение к себе и жестко закрепляется на рулевом валу 2.
Таким образом, регулирование скорости движения транспортного средства осуществляется за счет изменения положения органа управления 51, перемещающегося в направляющих 53 и 54 корпуса 1 и связанных с ним гибкими тросами 48 и 49 передних 26 и 27 и задних 30 и 31 кронщтейнов ножных рычагов 20 и 21.
Применение в мускульном приводе транспортного средства регулятора скорости позволяет водителю в зависимости от дорожных условий изменять скорость движения транспортного средства.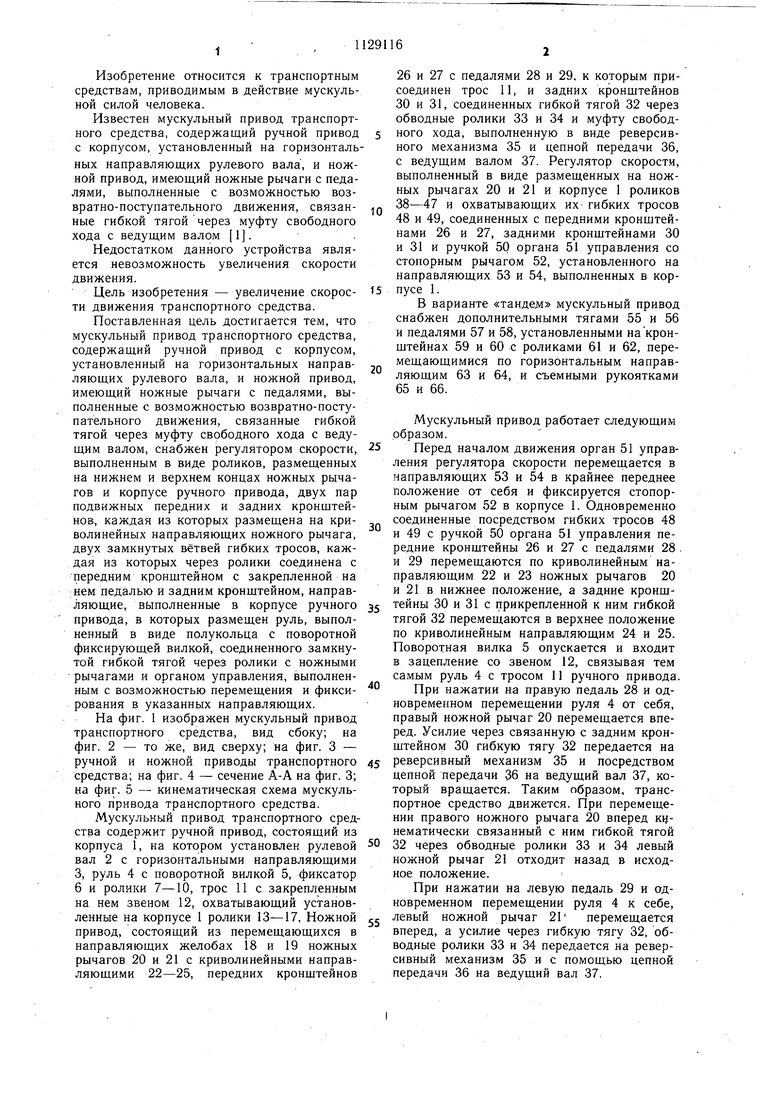
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортное средство с мускульным приводом | 1986 |
|
SU1311996A1 |
| САМОПЕД | 2007 |
|
RU2373099C2 |
| Мускульный привод транспортного средства | 1982 |
|
SU1065279A1 |
| МУСКУЛЬНЫЙ ПРИВОД ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2038252C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО, ПРИВОДИМОЕ В ДВИЖЕНИЕ МУСКУЛЬНОЙ СИЛОЙ ЧЕЛОВЕКА, ПРЕИМУЩЕСТВЕННО ТРЕХКОЛЕСНЫЙ ВЕЛОСИПЕД | 1994 |
|
RU2096238C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2008 |
|
RU2392166C1 |
| Веломобиль | 1989 |
|
SU1720921A1 |
| ТАНДЕМ А.Г. ДВОРЯНИДОВА | 2003 |
|
RU2247051C1 |
| Привод транспортного средства, приводимого в действие мускульной силой человека | 1986 |
|
SU1505832A1 |
| ВЕЛОСИПЕД С ЛИНЕЙНЫМ ПРИВОДОМ С ПЕДАЛИРОВАНИЕМ И ДВИЖЕНИЕМ АКАДЕМИЧЕСКОЙ ГРЕБЛИ | 2009 |
|
RU2413649C1 |
МУСКУЛЬНЫЙ ПРИВОД ТРАНСПОРТНОГО СРЕДСТВА, содержащий ручной привод с корпусом, установленный на горизонтальных направляющих рулевого вала, и ножной привод, имеющий ножные рычаги с педалями, выполненные с возмож- ностью возвратно-поступательного .движения, связанного гибкой тягой через муфту свободного хода с ведущим валом, отличающийся тем, что, с целью увеличения скорости движения, он снабжен регулятором скорости, выполненным в виде роликов, размещенных на нижнем и верхнем концах ножных рычагов и корпусе ручного привода, двух пар подвижных передних и задних кронштейнов, каждая из которых размещена на криволинейных направляющих ножного рычага, двух замкнутых ветвей гибких тросов, каждая из которых через ролики соединена с передним кронщтейном с закрепленной на нем педалью и задним кронштейном, направляющие, выполненные в корпусе ручного привода, в которых размещен руль, выполненный в виде полукольца с поворотной фиксирующей вилкой, соединенного замкнутой гибкой тягой через ролики с ножными а рычагами, и органом управления, выполненым с возможностью перемещения и фикси(Л рования в указанных направляющих.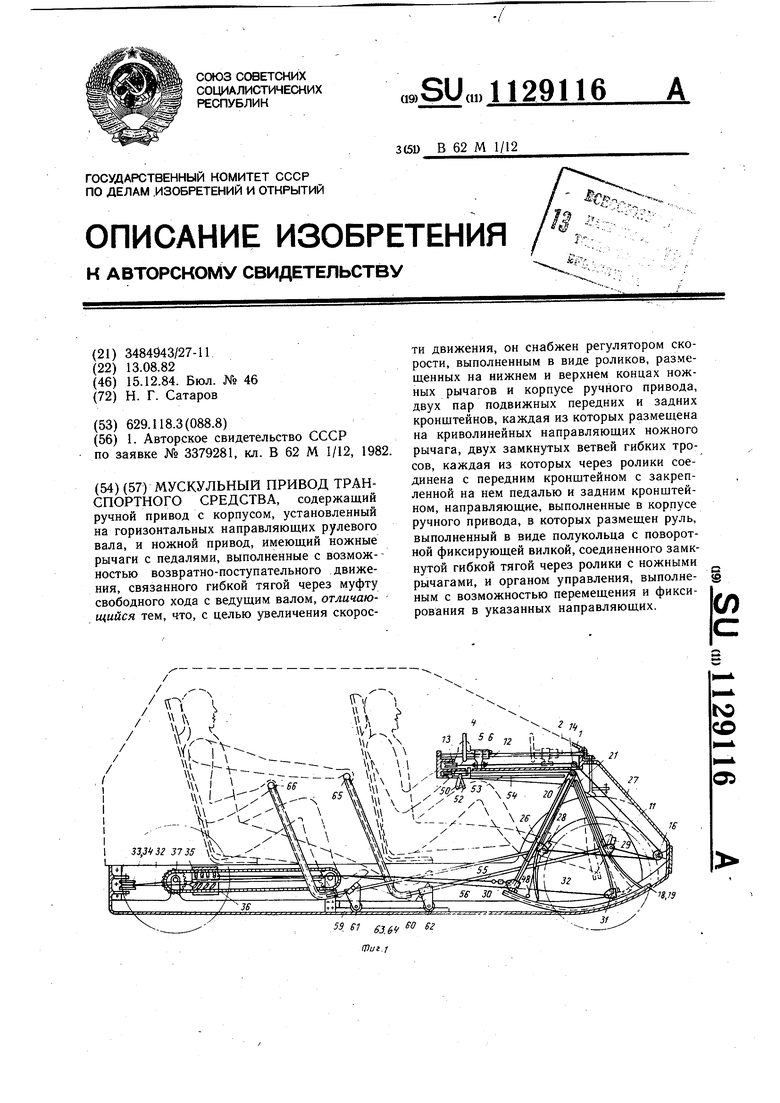
К-А
19
фиг. Ц
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР по заявке № 3379281, кл | |||
| Способ крашения тканей | 1922 |
|
SU62A1 |
