113
Изобретение относится к подъемно- транспортному машиностроерию И может быть использовано в лебедках, например, монтажных для перемещения тяжеловесных грузов.
Цель изобретения - снижение нагрузок и энергетических затрат путем уменьшения амплитуды колебаний тягового каната.
На фиг. 1 представлена лебедка, вид спереди; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг.1; на фиг. 4 - разрез В-В на фиг. 1; на фиг. 5 - вид Г на фиг.2.
На плоском основании 1 жестко закреплены вертикально установленные рамы 2, на каждой продольной балке основания 1 установлено по две рамы. Рамы 2 через тяги 3 связаны с обоймами 4 и 5 с помощью шарниров 6 и 7. Каждая обойма соединена с рамами двумя парами тяг 3, в каждой паре тяги расположены параллельно между собой в продольной плоскости обоймы, благодаря чему образуется шарнирный четырехзвенник; тяга - верхние перекладины рам - тяга - обойма.
Б торцовой части осей нижних шарниров 7 установлены шариковые упоры 8, взаимодействующие с ограничительной пластиной 95 расположенной в нижней части рамы 2 и жестко соединенной с основанием 1.
Каждая обойма приводится в движение гидроцилиндром 10 привода, шток которого шарнирно связан с помощью проушины 11 с обоймой, а цилиндр - с помощью проушины 12 с основанием 1
На подшипниках в каждой обойме установлено по два многоручьевых шкива 13, снабженных плоскими фланцами 14с зубчатыми венцами,, С каждым фланцем 14 взаимодействуют , крепленные на обойме гидротормоз 15 и стопор 16. Гидротормоз 15 вьтолнен нормально разомкнутым и содержит рычаги 17 и 18, шарнирно закрепленные на оси 19, тормозные колодки 20 и 21 с фрикционными накладками 22 и гидроцилиндр 23. Стопор 16 содержит корпус 24, несущий ролик 25,, пружину 26, рычаг 27, а также электромагнит 28, удерживающий от поворота рычаг 27
На основании 1 установлены отводные блоки 29 и направляюш;ие ролики 30 для тягового каната 31. Основание 1 также снабжено проушинами 32 для заякоривания всего устройства.
52
Все гидроцилиндры, как привода 10, ак и гидротормозов 15, присоединены системе управления (не показана). j Тяговый канат 31 от груза (не поазан) поступает через направлякяцие олики 30 к первой паре шкивов на обойме 4, огибает последовательно кивы 13, проходит по отводным блокам 29 и поступает на вторую пару
шкивов 13, установленных на обойме 5, которые также последовательно огибает по полуокружностям. Далее тяговый канат 31 проходит через направляющие ролики 30 и поступает на канатоукладочную лебедку (накопитель, каната) (не показана).
Лебедка через проушины 32, закрепленные на основании 1, крепится к анкерным устройствам (якорям) (не показана). Обойма, а соответственно и рамы Morysr быть расположены не только параллельно друг к другу, но и под любым углом.
Устройство работает как в режиме подъема груза, так и в режиме опускания , т.е. оно является реверсивным. В исходном при подъеме груза положении обоймы 4 и 5 с помощью гидроцилиндров 10 отклоняются вправо (фиг.2).
Предварительно при всех расторможенных шкивах 13 производится выбирание канатоукладочной лебедкой слабины тягового каната 31, при этом шкивы 13 свободно проворачиваются. После этого шкивы 13 обоймы 4 затормаживаются гидpoтopмoзa ш 15, взаимодейст- . вукищми с плоским фланцем 14. Шкивы
13 обоймы 5 в это t время расторможе- ны, т.е. могут свободно вращаться. При включении гидроцилиндров 10 привода и подачи давления в соответствующие полости гидроцилиндров обоймы
начинают перемещаться влево, при этом обойма 4 совершает рабочий ход вместе с охватывающим ее шкивы 13 тяговым канатом 31, а юбойма 5 совершает холостой ход, при котором ее пживы
13 свободно перекатываются по тяговому канату 31, излишки которого поступают на канатоукладочную лебедку. Этот этап совершается до тех пор, пока обойма 4 не занимает крайнего левого положения. Затем происходит рас- тормаживание шкивов 13 обоймы 4 и затормаживание шкивов 13 обоймы 5. Процесс повторяется с той лишь разницей, что обойма 5 совершает рабочий
3 13
ход, а обойма 4 - холостой. Так продолжается в течение всего процесса подъема груза.
Для обеспечения равномерности подъема (опускания) груза скорость выполнения рабочего хода обой меньше скорости выполнения холостого хода. Это необходимо для того, чтобы обойма, совершающая холостой ход, успела совершить перемену в направлении движения (качания) и начала отклоняться одновременно, но в другую сторону, с другой обоймой, срвершакнцей рабочий ход.
Работа гидротормозов 15 синхронна с работой гидроцилиндров 10. При выполнении рабочего хода включены гидротормозы 15, препятствующие проворачиванию шкивов 13, при совершении холостого хода гидротормозы 15 отключены.
Устройство работает в двух режимах.
Первый режим, раздельное независимое отклонение каждой обоймы, необходим для предварительной настройки устройства, а также для обеспечения возможности варьирования в широких пределах (от противофазы до движения в одной фазе) рассогласования отклонений обойм при работе.
Второй режим, одновременное движение обеих обойм в одном направлении, обеспечивает автоматическую работу устройства, при номинальном тяговом усилии как в режиме подъема груза, так и опускании, который совершается.по тем же циклам, только в обратном порядке.
54
Управление устройством осуществляется автоматически по сигналам конечных выключателей, размещенных на основании 1 и обоймах 4 и 5. По сигналам системы управления срабатывают гидрораспределители, управляющие работой всех гидроцилиндров.
Стопор 16 является нормально Замкнутым тормозом, поэтому при создании аварийной ситуации (отключение, электроэнергии, резкое падение давления в гидросистеме) электромагнит 28 стопора обесточивается и рычаг 27 под действием пружины 26 поворачивается, а ролики 25, западая в гнездо зубчатого венца фланца 14, стопорят его, предотвращая поворот шкива 13.
Формула изобретен, ия
20
Лебедка, содержащая основание, попарно установленные в приводных обоймах канатоведущие шкивы с охватывающим их тяговым канатом и с параллельными осями вращения, снабженные тормозными механизмами, и привод перемещения обойм канатоведущих шкивов, отличающаяся тем, что, с целью снижения нагрузок и энергетических затрат путем уменьшения амплитуды колебаний тягового каната, она снабжена рамаьш, вертикально установленными и жестко закрепленными на основании, и тягами, посредством которых обоймы канатоведущих шкивов шарНИРно подвешены к рамам с возможностью их перемещения в плоскости, перпендикулярной осям вращения канатоведущих шкивов.
LO HM
еч4
CM
В в (повернуто)
Б-Б
21
Фиг.З
Фиг.Ц

| название | год | авторы | номер документа |
|---|---|---|---|
| Лебедка | 1980 |
|
SU933627A1 |
| Лебедка | 1977 |
|
SU779289A1 |
| МАЯТНИКОВАЯ ПОДВЕСНАЯ КАНАТНАЯ ДОРОГА | 1967 |
|
SU202986A1 |
| КРАН ДЛЯ ТРЕЛЕВОЧНЫХ РАБОТ НА ЛЕСОЗАГОТОВКАХ | 1991 |
|
RU2011631C1 |
| Подвесная канатная дорога маятникового типа | 1979 |
|
SU927603A1 |
| Подвесная канатная установка | 1973 |
|
SU447312A1 |
| Подвесная канатная дорога маятникового типа | 1983 |
|
SU1110693A2 |
| Лифт переменной грузоподъемности | 1982 |
|
SU1049400A1 |
| СПОСОБ РЕМОНТА И РЕКОНСТРУКЦИИ ВЫСОТНЫХ ЖЕЛЕЗОБЕТОННЫХ СООРУЖЕНИЙ С ИЗМЕНЯЮЩЕЙСЯ КОНУСНОСТЬЮ, НАПРИМЕР ГРАДИРЕН И ПРОМЫШЛЕННЫХ ТРУБ | 2006 |
|
RU2334068C2 |
| Лебедка | 1982 |
|
SU1178687A2 |


Изобретение относится к подъем-, но-транспортному машиностроению, а именно к лебедкам, например, для перемещения тяжеловесных грузов. Цель изобретения - снижение нагрузок и энергетических затрат путем уменьше- ния амплитуды колебаний тягового каната. На основании 1 жестко закреплены рамы 2. На рамах 2 посредством тяг 3 шарнирно подвешены две обоймы 4 и 5, включающие по два канатоведу- щих шкива 13. Каждый шкив 13 снабжен гидротормозом 15 и стопором 16. С помощью гидроцилиндров 10 привода обоймам 4 и 5 сообщается колебательное движение. Когда одна обойма совершает рабочий ход при заторможенных шкивах 13, вторая обойма с расторможенными, свободно проворачивающимися шкивами 13 совершает холостой ход, при этом тяговый канат 31 перекатывается по шкивам 13. 3 ил. (Л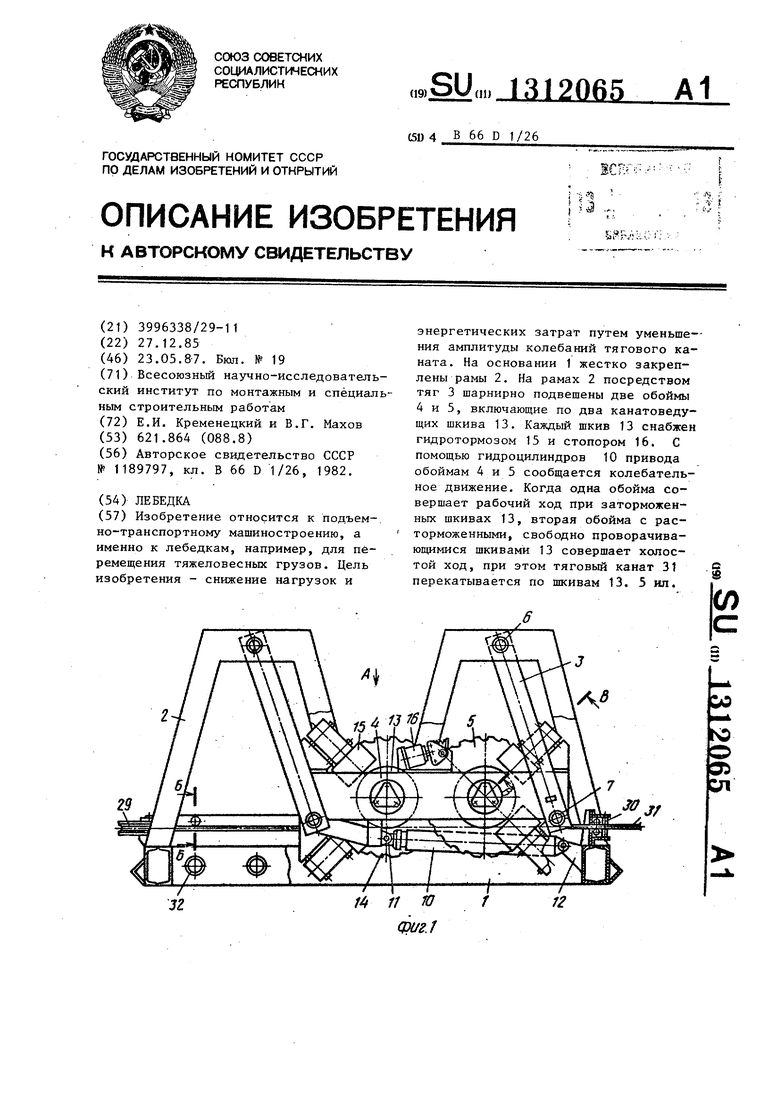
28
ВНИИПИ Заказ 1931/22 Тираж 721
Произв.-полигр, пр-тие, г. Ужгород, ул. Проектная, А
Подписное
| Авторское свидетельство СССР № 1189797, кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
