... 13
Изобретение относится к весоизмерительной технике и может быть использовано, например, для взвешивания банок с рыбопродуктами в цехах рыбообрабатывающих судов рыболовного флота.
Цель изобретения - повышение точности взвешивания.
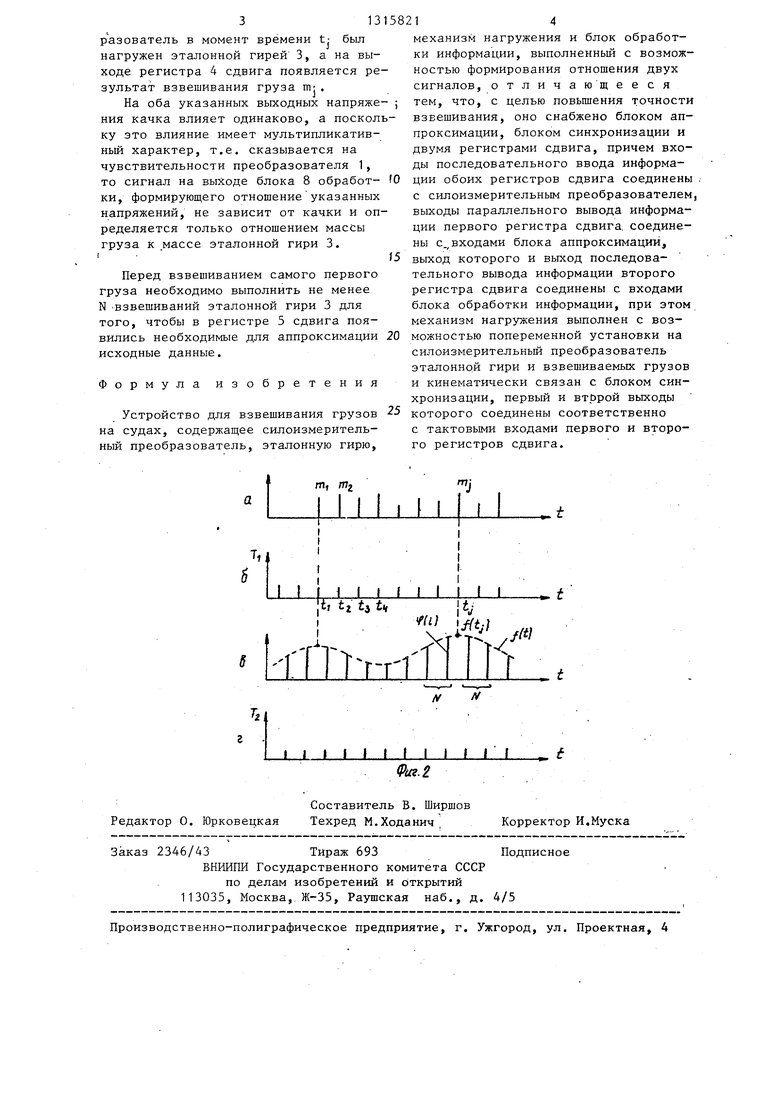
На фиг. 1 показана структурная . схема .устройства; на фиг. 2 - диаграммы, поясняющие его работу.
Устройство для взвешивания грузов например наполненных рыбой консервных банок, на плавучих ыбзавоДах содержит силоизмерителЬный преобразователь. 1 , механизм 2 нагружения, эталонную гирю 3, первый 4 и второй 5 регистры сдвига, блок 6 аппроксимации, блок 7 синхронизации и блок 8 обработки информации.
Механизм 2 нагружения выполнен с возможностью попеременной установки на силоизмерительный преобразователь 1 взвешиваемых грузов и эталонный гири 3, ,
Регистр 4 сдвига содержит N последовательно включенных ячеек 9, а . регистр сдвига 5 - 2N последователь- но включенных ячеек 10, причем число N зависит от требуемой точности взвешивания.
Силоизмерительный преобразователь 1, регистры 4 и 5 сдвига, блок. 6 аппроксимации и блок 8 обработки могут быть выполнены как на аналоговой, так и на цифровой элементной базе. При использовании аналоговой элементной базы блок 6 аппроксимации может быть выполнен в виде суммирующего усилителя,
I.
Выход силоизмерительного преобразователя 1 соединен с входами последовательного вводи информации регистров 4 и 5 сдвига. Выходы параллельного вывода информации регистра 5 сдвига соединены с входами блока 6 аппроксимации. Выход последнего и выход последовательного вывода информации регистра 4 сдвига соединены с входами блока 8 обработки информации. Блок 7 синхронизации кинематически связан с механизмом 2 нагружения. Выходы блока 7 синхронизации соединены с тактовыми входами регистров 4 и 5 сдвига.
Устройство работает следующим образом.
На сш1оизмерител.(ный прео.бразова- тель 1 с помощью механизма 2 нагружения попеременно устанавливаются взве
25
5821 . 2
шиваемые грузы и эталонная гиря 3, Электрическое напряжение на выходе силоизмерите.пьного преобразователя 1 пропорционально массе, которой он на5 гружен, но оно зависит также от наклонов и ускорений, вызванных качкой судна. После каждой установки груза блок 7 синхронизации в каждый из моментов времени t: вырабатывает такто0 вый импульс Т (фиг, 2 б), по которому выходное напряжение силоизмерительного преобразователя 1, пропорциональное массе груза, записывается в первой ячейке 9-1 регистра 4 сдви га, т,е, происходит запоминание результата взвешивания груза (фиг.1а). При этом результаты взвешивания предыдущих грузов сдвигаются на одну ячейку вправо, Таким образом, резуль0 тат взвешивания каждого груза появляется на выходе регистра 4 сдвига с задержкой в N тактов.
Аналогично по тактовому импульсу Т после установки эта.понной гири 3 напряжение, пропорциональное ее весу, запоминается в первой ячейке 10-1 регистра 5 сдвига, а предьщущие результаты ее взвешивания сдвигаются на одну ячейку вправо. Результаты
30 периодического взвешивания эталонной гири 3, записанные в ячейках регистра 5, представляют собой последова тельность дискретных отсчетов q(i) непрерывной функции времени (фиг,2в),
35 которая имела бы место в случае постоянного нагружения силоизмерительного преобразователя 1 эталонной гирей 3. Влок 6 аппроксимации восстанавливает значение f(tj) указанной
40 функции для момента tj взвешивания груза m: по N отсчетам до и N отсчетам после этого момента путем сложения этих 2N отсчетов, при этом для каждой ячейки регистра 5 суммиро45 .вание осуществляется со своим весовым коэффициентом. Величины коэффициентов и число 2N суммируемых взвешиваний эталонной гири 3 зависят от вида используемой аппроксимирующей
50 формулы, который определяется допустимой погрешностью взвешивания.
Таким через N тактов пос- ле взвешивания груза йа выходе бло- 55 ка 6 аппроксимации появляется напряжение, которое имело бы место на выходе силоизмерительного преобразователя 1 в момент tj взвешивания груза т;, если бы силоизмерительный преобразователь в момент времени t- был нагружен эталонной гирей 3, а на вы- коде регистра 4 сдвига появляется результат взвешивания груза т:,
На оба указанных выходных напряже ния качка влияет одинаково, а посколку это влияние имеет мультипликативный характер, т.е. сказывается на чувствительности преобразователя 1, то сигнал на выходе блока 8 обработ- ки, формирующего отношение указанных напряжений, не зависит от качки и определяется только отношением массы груза к массе эталонной гири 3.
Перед взвешиванием самого первого груза необходимо выполнить не менее N -взвешиваний эталонной гири 3 для того, чтобы в регистре 5 сдвига появились необходимые для аппроксимации исходные данные.
Формула изобретения
Устройство для взвешивания грузов на судах, содержащее силоизмеритель- ный преобразователь, эталонную гирю.
1-ГГг,-,-гТ1 rtf
I 1 t I 1 t t I t t I Г
Фиг.2
Составитель В. Ширшов Редактор 0. Юрковецкая Техред М.Ходанич, Корректор И,Муска
Заказ 2346/43Тираж 693Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
механизм нагружения и блок обработки информации, выполненный с возможностью формирования отношения двух
сигналов,
о т л и ч а ю щ е е с я
тем, что, с целью повьш1ения точности взвешивания, оно снабжено блоком аппроксимации, блоком синхронизации и двумя регистрами сдвига, причем входы последовательного ввода информации обоих регистров сдвига соединены с силоизмерительным преобразователем выходы параллельного вывода информации первого регистра сдвига соединены с., входами блока аппроксимации, выход которого и выход последовательного вывода информации второго регистра сдвига соединены с входами блока обработки информации, при этом механизм нагружения выполнен с возможностью попеременной установки на силоизмерительный преобразователь эталонной гири и взвешиваемых грузов и кинематически связан с блоком синхронизации, первый и втррой выходы которого соединены соответственно с тактовыми входами первого и второго регистров сдвига.
N f
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ взвешивания и устройство для его осуществления | 1988 |
|
SU1606870A1 |
| Устройство для восстановления непрерывных функций по дискретным отсчетам | 1983 |
|
SU1124338A1 |
| Способ цикловой синхронизации и система для его осуществления | 1987 |
|
SU1711342A1 |
| Устройство для вычисления текущего значения функции правдоподобия авторегрессионной случайной последовательности | 1980 |
|
SU907554A1 |
| Весоизмерительное устройство | 1988 |
|
SU1578497A1 |
| Многочастотный цифровой фильтр | 1987 |
|
SU1474827A1 |
| Устройство для взвешивания | 1986 |
|
SU1362944A1 |
| Цифровой фильтр | 1984 |
|
SU1262690A1 |
| Микропроцессорная весоизмерительная система | 1981 |
|
SU1078255A1 |
| Устройство для адаптивного сжатия информации | 1985 |
|
SU1320827A1 |
Изобретение относится к весоизмерительной технике. Цель изобретения - повышение точности взвешивания. Результат взвешивания каждого груза появляется на выходе регистра 4 сдвига с задержкой на N тактов. Через N тактов после взвешивания груза на выходе блока аппроксимации 6 по.яв- ляется напряжение, которое имело бы место на выходе силоизмерительно го преобразователя 1 в определенный момент взвешивания груза, если бы сило- измерительный преобразователь 1 в этот же момент времени был бы нагружен эталонной гирей 3, а на выходе регистра 4 сдвига появляется результат взвешивания груза. Сигнал на выходе блока 8 обработки не зависит от качки и определяется только отношением массы груза к массе эталонной гири 3. 2 ил. с Ф (Л с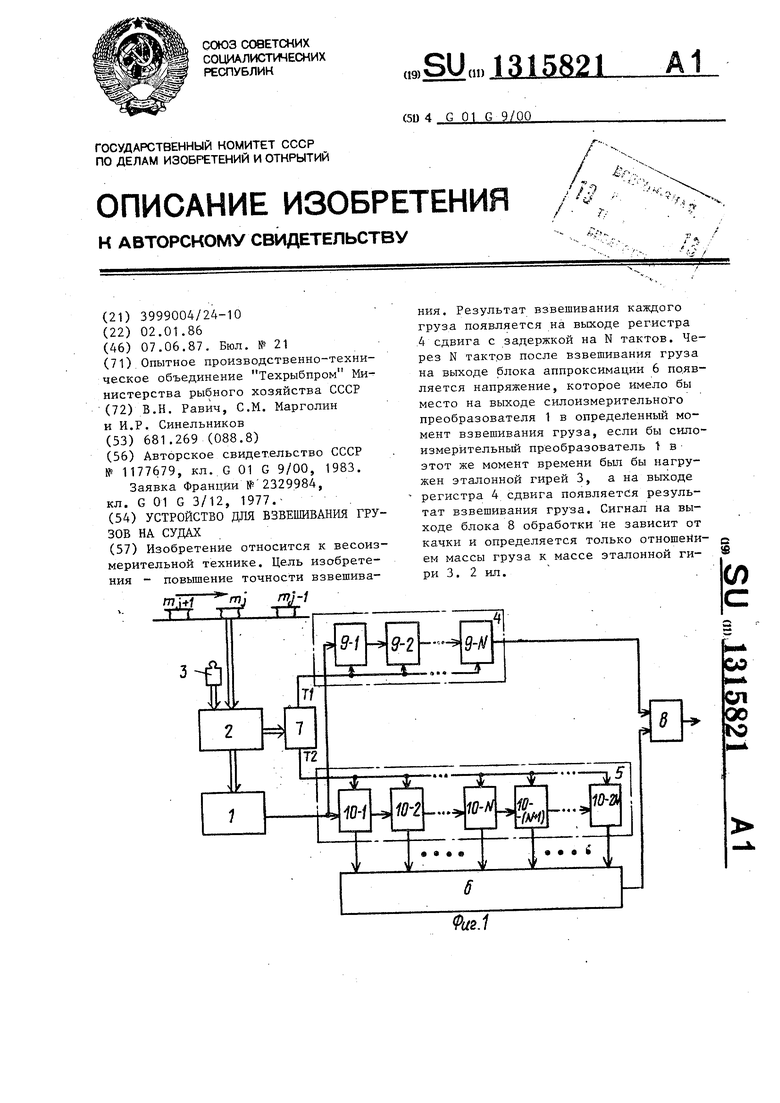
| Весоизмерительное устройство | 1983 |
|
SU1177679A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ЗАМАЗКА | 2007 |
|
RU2329984C1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
