гистр (Рг) 17, триггер (Тг) 8, вычитающее устройство (ВУ) 19 и шинный формирователь (ШФ) 20.
Устройство работает следующим образом.
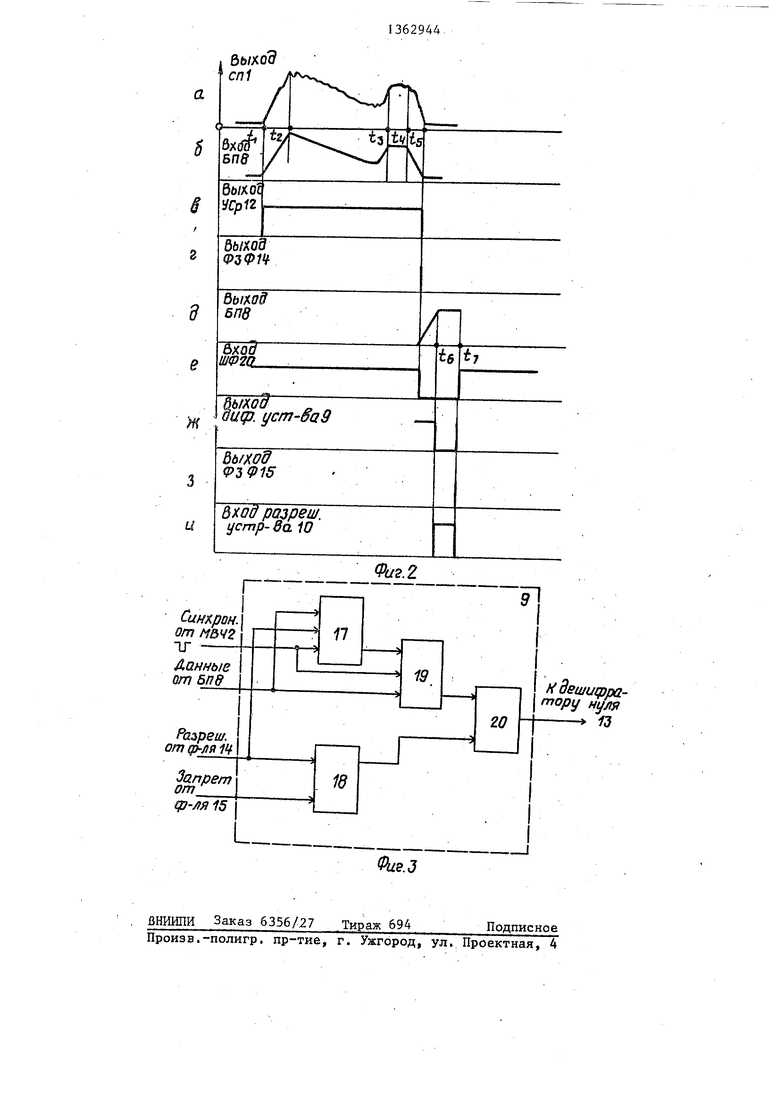
Сигнал с силоизмерительного преобразователя 1 непрерывно поступает в МВУ 2 и имеет вид, показанный на фиг,2а. При зтом интервалу времени
S
10
О - t, соответствует вес пустого
грейфера.
t, - интервал набора
г
15
в грейфер руды и его подъема, tj - перемещение стрель: крана,, когда центробежная сила отклоняет трос крана с грейфером, искажая сигнал низкочастотной динамической помехой.
Ч t,, - зависание грейфера перед
20
25
30
Изобретение относится к весоизмерительной технике и может быть использовано для взвешивания грузов в процессе их перемещения, например при погрузке и разгрузке судов в портах кранами.
Целью изобретения является повышение точности за счет автоматического определения метрологически благоприятного момента измерения массы груза,
На фиг,1 представлена блок-схема предлагаемого устройства; на фиг.2 - временные диаграммы, поясняющие работу устройства; на фиг.З - пример конкретной реализации одного из блоков устройства.
Устройство (фиг.1) содержит сило- измерительный преобразователь (СП) 1 , соединеннь:й с микропроцессорным вычислительным устройством (МВУ) 2, в которое входят центральный процессор (ЦП) 3, пос тоянное запоминающее устройство (ПЗУ) 4, устройство 5 управления (УУ), контроллер 6 прерываний (КП) и синхронизатор (СХ) 7, Адресный выход и выход управления МВУ 2 соединены с соответствующими входами блока 8 памяти, входы и выходы данных которого подключены к выходу и входу данных МВУ 2, причем последний вход объединен также с-входами Дифференцирующего 9 и вычитающего 10 устройств. Второй информационный вход дифференцирующего устройства 9 подктаочен к синхронизирующему выходу МВУ 2, Выход данных МВУ 2 аоединен с информационным входом регистра I1 и одним из входов устройства 12 сравнения, второй вход которого и вычитающего устройства 10 подключены к выходу регистра 11, На вход записи регистра 11 поступает внешний сигнал Начальный вес. Выход дифференцирующего устройства 9 подключен к входу дешифратора 13 нуля, З строй ство 12 сравнения и дешифратор 13 нуля соединены с формирователями 14 и 15 заднего фронта (ФЭФ) соответственно. Выход дешифратора 13 нуля дополнительно подключен к разрешающему входу вычитающего устройства 10, выход которого соединен с входом индикатора 16, Выходы формирователей 14 и 15 подклю- прерываний переводит ЦПЗ в МВУ 2 в чены к входам прерываний МВУ 2 и раз- 55 Работу по программе Измерение, При решающему и запрещающему входам диф- этом прием и запись информации в ференцирзтощего устройства 9 соответ- блок 8 памяти прекращается, а сигна- ственно. Дифференцирующее устройство лом Чтение на входе управления на- 9 (фиг,3) содержит запоминающий ре- чинается ее считывание, начиная с адего раскрытием, с - t - раскрытие грейфера и сброс груза, В МВУ 2 ЦП 3 осуществляет цифровую фильтрацию вы- сок очастотной составляющей сигнала (из-за вибрации и влияния работы механизмом управления кранов), Фильтрация и масштабирование сигнала осуществляется по программе Набор дан- нб1х, хранящейся в ПЗУ 4, После обработки он имеет вид, показанный на фиг,25. Одновременно сигналами адресов и управления (Запись) сМВУ 2, отфильтрованные данные записываются по входу данных в блок 8 памяти, поступают на информационный вход регистра 11 и вход устройства 12 срав- „t- нения с, начальным весом (весом пустого грейфера), хранимым в регистре П, Запись сигнала-о начальном весе в регистр 11 из ЦП 3 осуществляется внешним сигналом Начальный вес (например с пульта управления) при взвешивании пустого грейфера в начале смены,
При подъеме и перемещении груженного грейфера на выходе устройства 45 12 сравнения формируется импульс,
передний фронт которого фиксирует момент подъема грейфера с грузом, а задний - момент опорожнения грейфера (фиг,26), По заднему фронту импульса gQ формирователь 14 заднего фронта выра- , батывает импульс (фиг,2г), который разрешает работу дифференцирующего устройства 9 и через контроллер 6
40
29442
гистр (Рг) 17, триггер (Тг) 8, вычитающее устройство (ВУ) 19 и шинный формирователь (ШФ) 20.
Устройство работает следующим образом.
Сигнал с силоизмерительного преобразователя 1 непрерывно поступает в МВУ 2 и имеет вид, показанный на фиг,2а. При зтом интервалу времени
S
10
О - t, соответствует вес пустого
грейфера.
t, - интервал набора
г
в грейфер руды и его подъема, tj - перемещение стрель: крана,, когда центробежная сила отклоняет трос крана с грейфером, искажая сигнал низкочастотной динамической помехой.
Ч t,, - зависание грейфера перед
прерываний переводит ЦПЗ в МВУ 2 в Работу по программе Измерение, Пр этом прием и запись информации в блок 8 памяти прекращается, а сигна лом Чтение на входе управления на чинается ее считывание, начиная с а
прерываний переводит ЦПЗ в МВУ 2 в Работу по программе Измерение, При этом прием и запись информации в блок 8 памяти прекращается, а сигна- лом Чтение на входе управления на- чинается ее считывание, начиная с адего раскрытием, с - t - раскрытие грейфера и сброс груза, В МВУ 2 ЦП 3 осуществляет цифровую фильтрацию вы- сок очастотной составляющей сигнала (из-за вибрации и влияния работы механизмом управления кранов), Фильтрация и масштабирование сигнала осуществляется по программе Набор дан- нб1х, хранящейся в ПЗУ 4, После обработки он имеет вид, показанный на фиг,25. Одновременно сигналами адресов и управления (Запись) сМВУ 2, отфильтрованные данные записываются по входу данных в блок 8 памяти, поступают на информационный вход регистра 11 и вход устройства 12 срав- нения с, начальным весом (весом пустого грейфера), хранимым в регистре П, Запись сигнала-о начальном весе в регистр 11 из ЦП 3 осуществляется внешним сигналом Начальный вес (например с пульта управления) при взвешивании пустого грейфера в начале смены,
При подъеме и перемещении груженного грейфера на выходе устройства 12 сравнения формируется импульс,
передний фронт которого фиксирует момент подъема грейфера с грузом, а задний - момент опорожнения грейфера (фиг,26), По заднему фронту импульса формирователь 14 заднего фронта выра- батывает импульс (фиг,2г), который разрешает работу дифференцирующего устройства 9 и через контроллер 6
реса последствий записанной ячейки (фиг. 2).
Считываемая информация поступает в дифференцирующее устройство 9,.которое по изменению поступающей информации за время синхроимпульса определяет значение производной сигнала , По разрешающему сигналу с выхо - да формирователя 14 заднего фронта приводятся в исходное (нулевое) состояние регистр-17 и триггер 18 в дифференцирующем устройстве 9 (фиг.З),. Уровень О с выхода Тг 18 разрешает
прохождение информации с выхода вычи- 15 ному вычислительному устройству, усттающего устройства 9 через шинный формирователь 20 (фиг.2е). Считываемая с блока 8 памяти информация и синхроимпульсы с Сх 7 МВУ 2 поступают на входы регистра 17 и вычитающего устройства 19. За время действия синхроимпульса предыдущая информация , хранимая в регистре 17, вычитается вычитающим устройством 19 из текущей Р-, а по заднему фронту синхроимпульса переписывается в регистр 17 и на следующем импульсе вычитается из + и т.д.
а
Полученный сигнал с выхода дифференцирующего устройства 9 (фиг.2) поступает на дешифратор 13 нуля, на выходе которого формируется сигнал уровня логическая 1 при равенстве нулю входного сигнала, т.е. длительность импульса на выходе дешифратора 13 нуля соответствует времени зависания грейфера над местом его разгрузки (фиг.Яи). В это время прекращается влияние на сигнал составляющих от маятникового отклонения тросса с грузом, от действия механизмом крана и т.д.,сигнал максимально близок к постоянному, а его производная равна нулю. С метрологической точки зрения он наиболее близок к истинному значению массы взвешиваемого груза.
Сформированный строб разрешает работу вычитающего устройства 10, которое, из данных, считываемых с блока 8 памяти, вычитает начальный вес (с регистра 11). Выходной сигнал вычитающего устройства 10 индицируется индикатором 16 как масса Нетто взв.елпиваемого груза.
По заднему фронту импульса с выхода 13 дешифратора (фиг.2е) формирователем 15 вырабатывается импульс (фиг.2ч), по S-входу устанавливающий триггер Тг 18 (в дешифраторе 9) в
20
25
30
ройство сравнения, блок памяти, индикатор, регистр, при этом вход и выход данных блока памяти соответственно подключены к выходу и входу данных микропроцессорного устройства, а информационный вход регистра соединен с выходом данных микропроцессорного вычислительного устройства, выход регистра с одним из входов устройства сравнения, о т л и ч а ю- щ е е с я тем, что, с целью повышения точности, в него введены дифференцирующее устройство, дешифратор нуля, два формирователя заднего фронта и вычитающее устройство, причем выходы первого и второго формирователей заднего фронта подключены к входам прерываний микропроцессорного вычислительного устройства и соответ35 ственно к разрешающему и запрещающему входам дифференцирующего устройства, а входы первого и второго формирователей заднего фронта подключены к выходам устройства сравнения и де40 шифратора нуля, при этом другой вход устройства сравнения соединен с выходом данных микропроцессорного вычислительного устройства, вход дешифратора нуля соединен с выходом диффе45 ренцирующего устройства, один из информационных входов которого подклю- . чен к синхронизирующему выходу микропроцессорного вычислительного устройства, а другой из информационных входов дифференцирующего устройства и вход вычитающего устройства - к выходу данных блока памяти, входы вычитающего устройства подключены к выходам регистра и дешифратора нуля, при- ем вход блока памя ти соединен с входами управления и адреса микропроцессорного вычислительного устройства, а индикатор подключен к вычитающему устройству,.
50
55
состояние 1 , что запрещает прохождение информации через ШФ 20, т.е. запрещает работу дифференцирующего устройства -9 (фиг.2и). Одновременно этот импульс через кон.троллер прерываний вновь переводит ЦП 3 в программу Набор данных и устройство готово к следующим измерениям.
Формула изобретения
Устройство для взвешивания, содержащее силоизмерительный преобразователь, подключенный к микропроцессор0
5
0
ройство сравнения, блок памяти, индикатор, регистр, при этом вход и выход данных блока памяти соответственно подключены к выходу и входу данных микропроцессорного устройства, а информационный вход регистра соединен с выходом данных микропроцессорного вычислительного устройства, выход регистра с одним из входов устройства сравнения, о т л и ч а ю- щ е е с я тем, что, с целью повышения точности, в него введены дифференцирующее устройство, дешифратор нуля, два формирователя заднего фронта и вычитающее устройство, причем выходы первого и второго формирователей заднего фронта подключены к входам прерываний микропроцессорного вычислительного устройства и соответ5 ственно к разрешающему и запрещающему входам дифференцирующего устройства, а входы первого и второго формирователей заднего фронта подключены к выходам устройства сравнения и де0 шифратора нуля, при этом другой вход устройства сравнения соединен с выходом данных микропроцессорного вычислительного устройства, вход дешифратора нуля соединен с выходом диффе5 ренцирующего устройства, один из информационных входов которого подклю- . чен к синхронизирующему выходу микропроцессорного вычислительного устройства, а другой из информационных входов дифференцирующего устройства и вход вычитающего устройства - к выходу данных блока памяти, входы вычитающего устройства подключены к выходам регистра и дешифратора нуля, при- ем вход блока памя ти соединен с входами управления и адреса микропроцессорного вычислительного устройства, а индикатор подключен к вычитающему устройству,.
0
5
Г
CuHf.poH. от fi542
тг
Ланные от 5/7 &
Разреи/.
Запрет
15
Фаг.2
Ндешидзра- тору нуля
13
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для поосного взвешивания вагонов в движении | 1985 |
|
SU1278603A1 |
| Устройство для взвешивания автомобилей в движении | 1987 |
|
SU1432340A1 |
| Устройство для взвешивания движущихся объектов | 1985 |
|
SU1288506A1 |
| Устройство для взвешивания движущихся объектов | 1984 |
|
SU1273745A2 |
| Устройство для управления вентильным преобразователем | 1984 |
|
SU1205243A2 |
| Устройство для контроля хода программы и перезапуска ЭВМ | 1987 |
|
SU1501066A2 |
| Устройство для обмена информацией | 1982 |
|
SU1084776A1 |
| Устройство для отладки микропроцессорных систем | 1989 |
|
SU1672455A1 |
| Преобразователь частоты в код | 1988 |
|
SU1547065A1 |
| Устройство для ввода информации | 1986 |
|
SU1314326A1 |
Изобретение относится к области весоизмерительной техники. Цель изобретения - повьЛпение точности. Устройство содержит силоизмерительный преобразователь 1, вычислительное устройство 2, процессор 3, запоминающее устройство 4, устройство 5 управления, контроллер 6 прерываний, синхро- 1дазатор 7, блок 8 памяти, дифференцирующее 9 и вычитающее 10 устройства, регистр II, устройство 12 сравнения, дешифратор 13 нуля, форм1-1рова- тели 14 и 15 и и;-адикатор 16. Введение новых элементов и образование новых связей между элементами устройства позволяют автоматически определить метрологическ благоприятный момент измерения массы груза. 3 ил . е 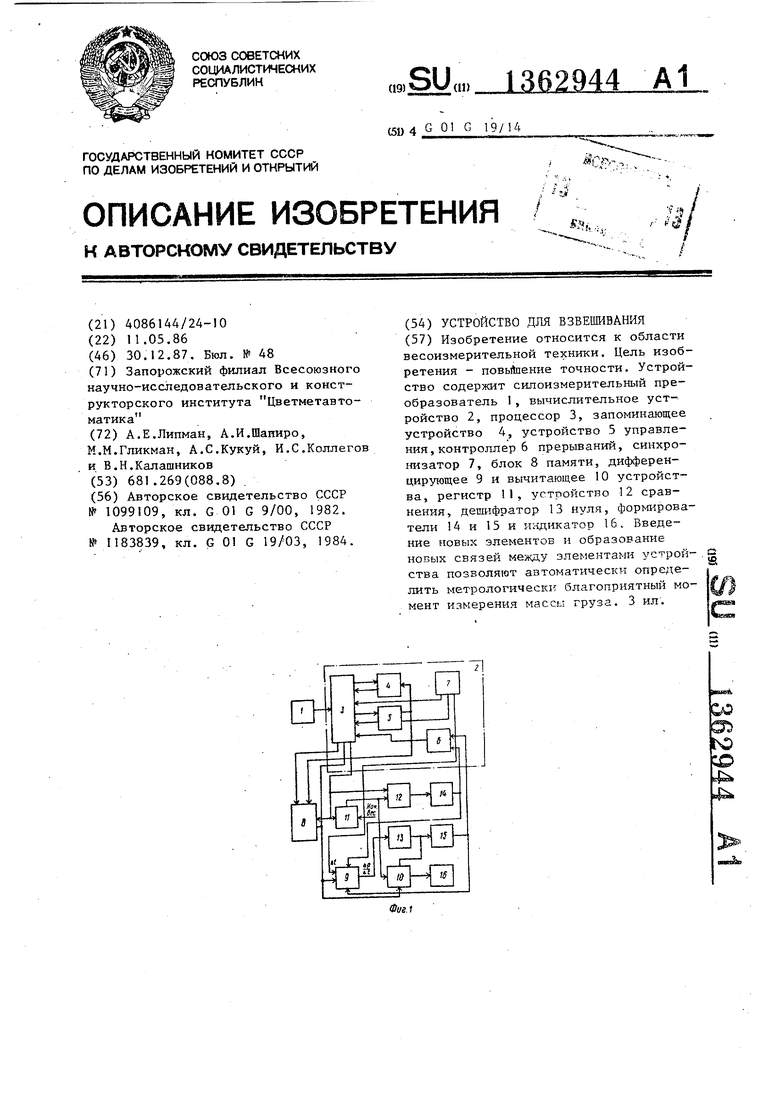
ВНИИПИ Заказ 6356/.27 .Тираж 694
Произв.-полигр. пр-тие, г. Ужгород, ул. Проектная, 4
Подписное
| Устройство для динамического взвешивания | 1982 |
|
SU1099109A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для взвешивания движущихся объектов | 1984 |
|
SU1183839A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
