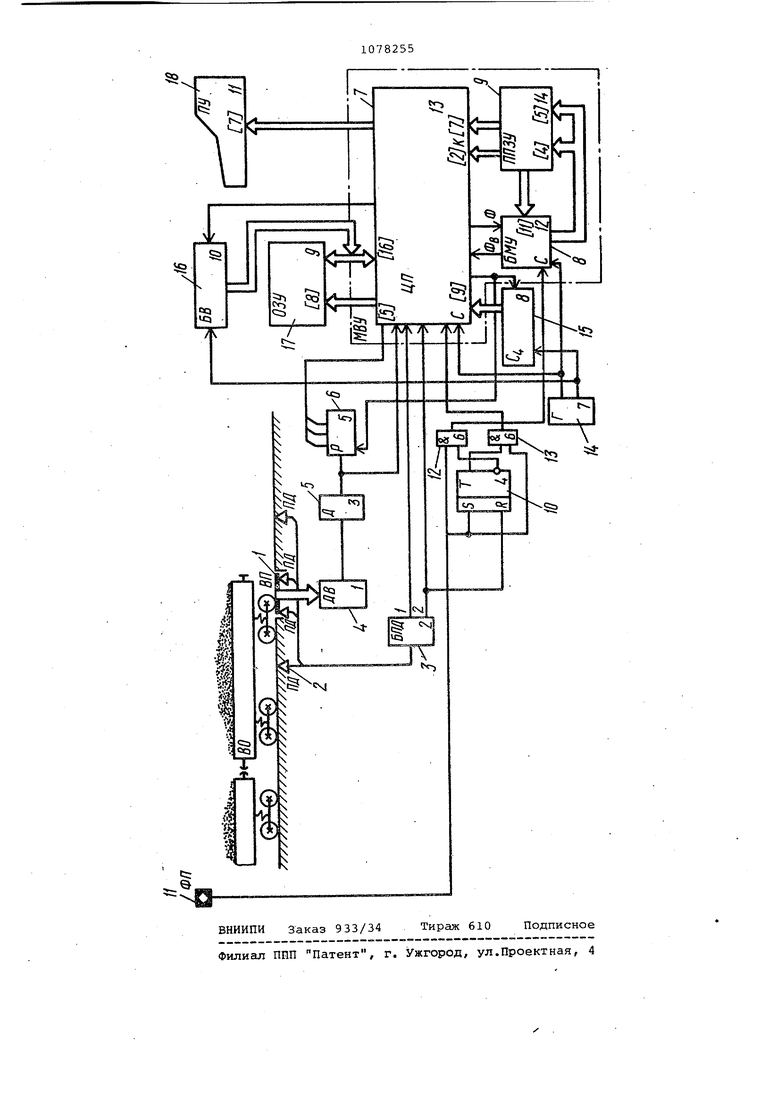
Изобретение относится к весоизме рительной технике и предназначено для взвешивания, опознавания номера взвешиваемого о&ъекта и регистрации измеренных параметров, а также времени прохождения движущихся объекто например автомобилей, железнодорожных вагонов и других, через весокон рольный пункт. Известно устройство, содержащее первый и второй грузоприемный узлы с силоизмерительными датчиками, под ключенными к весоизмерительным блокам и датчикам количества вагонов, блок памяти веса брутто, блок корре ции веса нетто, два датчика номера состава и два адресных;блока 1. однако это устройство не обеспечивает требуемую точность при больших скоростях движения взвешиваемого объекта. Наиболее близкой к изобретению по технической сущности является весоизмерительная система, содержащая весовую платформу, опирающуюся на частотный датчик веса, путевые датчики, две схемы И, микропродессорное вычислительное устройство, к входам которого подключен кварцевый генератор, а к выходам печатающее устройство, блок времени и оперативное запоминающее устройство 2. Однако известная система не орес достаточную точность измерения при больших скоростях движе ния объекта, сложна и трудоемка в изготовлении, что ограничивает область ее применения. Целью изобретения является расширение области применения и повЕлие ние точности взвешивания и надежное ти всей системы в целом. Эта цель достигается тем, что в микропроцессорную весоизмерительную систему, содержащую весовую платфор му, опирающуюся на частотный датчик веса, путевые датчики, две схемы И и микропрс1цессорное вычислительное устройство, к входам которого подключен кварцевый генератор, а к выходам - печатающее устройство, блок времени и оперативное запоминающее устройство, введены фотоприемник опознавания движущегося объекта, .блок путевых датчиков, подключенный своим входом к путевым датчикам, а выходами - к микропроцессорному вычислительному устройству, делитель частоты датчика веса, триг гер управления режимами опознавания регистр измерения количества периодод датчика веса к счетчик эталонной частоты, причем выход датчика вера подключен через делитель частоты на вход микропроцессорного вычислительного устройства и регистра измерения периодов.частоты датчика веса, выходы которого подключены на информационные входы микропроцессорного вычислительного устройства, выход фотоприемника подключен на единичный вход триггера и первые входы схем и, нулевой выход триггера подключен на второй вход первой схемы И, единичный выход - на второй вход второй схемы И, выход первой схемы И подключен к управляющему входу микропроцессорного вычислитель ного устройства, выход второй ск&мы И подключен на третий вход микропроцессорного вычислительного устройства, выход блока путевых датчиков подключен на нулевой вход триггера, выходы счетчика эталонной частоты подключены на вторые информационные входы микропроцессорного вычислительного устройства, управляющий выход которого подключен на вход регистра измерения количества периодов датчика веса и счетчика эталонной частоты, при этом второй выход кварцевого генератора подключен к входам счетчика и блока времени, а информационные выходы блока времени подключены к входу оперативного запоминающего устройства. На чертеже схематически изображена микропроцессорная весоизмерительная система. Система содержит весовую платформу 1, путевые датчики 2, соединенные своими выходами с блоком 3 путевых датчиков, датчик 4 веса, соединенный своим входом с весовой платформой 1, а выходом - с делителем 5 ча;стоты,, регистр б измерения количества периодов датчика веса, своим входом соединенный с делителем 5. частоты, а выходами - с микропроцессорным вычислительным устройством, состоящим из центрального процессора 7, блока 8 микропрограммного управления иперепрограммируемого постоянного запоминающего устройства 9, триггер 10, входами соответственно соединенный с блоком 3 путевых- датчиков и фотоприемником 11, а своими выходами подключенный к схемам И 12 и 13, выходы которых соответственно подключены к блоку 8 микропрограммного управления и центральному процессору 7, кварцевый генератор 14, выходами подключенный к счетчику 15 и блоку 8 микропрограммного управления, к центральному . процессору 7 и блоку 16-времени, выходная шина которого подключена к двухсторонней информационной шине, соединяющей оперативное запоминающее устройство .17 и центральный процессор 7, адресные выходы которого подсоединены к входам оперативного зароминающего устройства 17 и печатающего устройства 18.
Система работает следующим образом.
При прохождении локомотива в хвосте поезда, фотоприемник и системы устанавливается на расстоянии 100120 м от весоконтрольного пункта. На локомотиве установлена кодовая табличка с номере . состава, а напротив фотоприемника 11 - осветитель с остронаправленным лучом .
Первый сигнал, указывающий о прохождении состава через весоконтрольный пункт, поступает от фотопрг.емника 11 на единичный вход триггера 10 и один из входов схем и 12 и 13. В исходном состоянии триггер 10 поддерживает на единичном выходе нулевой уровень потенциала, а на нулевом - единичный. Единичный потенциал подается на второй вход схемы И 12,. куда приходит и импульс от фотоприемника 11. Следовательно, на выходе схемы И 12 присутствует единичный импульс, который поступает на вход блока 8 микропрограммного управления. Задним фронтом импульса, поступившего от фотоприемника 11 на единичный вход триггера 10, производится установка его в единичное состояние и разрешающий потенциал снимается с одного из входов схемы И 12. Триггер 10 устанавливается в единичное состояние, следовательно, с его единичного входа разрешающий потенциал поступает на один из входов схемы И 13, которая открыта для импульсов, поступающих от фотоприемника 11 на информационный вход центрального процессора 7.
При поступлении сигнала на вход блока 8 (вход загрузки адреса микрокоманды) он начинает работать от поступающих сигналов синхронизации С с кварцевого генератора 14. По сигналу синхронизации блок 8 производит выбор первой микрокоманды из первой-ячейки блока 9. Код микрооперации в виде семи разрядов микрофункций FQ - F И двух разрядов маски К поступает на вход центрального процессора 7,-а одиннадцать разрядов представляющих собой четыре разряда Для управления логикой признаков и семь разрядов для определения адреса следующей микрокоманды, подайтся на соответствующие входы блока 8 По первой микрокоманде происходит засьшка в один из сверхоперативных регистров центрального процессора 7 нулевого кода, т.е. установка регистра в ноль. Адрес второй микрокоманды вырабатывается с учетом выполнения предыдущей микрокоманды и признаков а также кодами функций перехода и т.д.
Первые два сигнала, поступающие на информационный вход центрального
процессора 7 от фотоприемника 11 через .Открытую разрешающим потенциалом с единичного выхода триггера 10 схему. И 12, служат для анализа скорости прохождения локомотивосостава через весоконтрольный пукнт. Следовательно, каждая кодовая таблица имеет перфорации для выработки управляющих сигналов: первого - для включения микропроцессорного вычислительного устрой0 ства, двух последующих - для анализа скорости прохождения движущегося объекта. Определение скорости необходимо для того, чтобы в заданные моменты времени анализировать посту5 пающие сигналы от фотоприемника 11. Если в заданный момент времени есть сигнал, это свидительствует о наличии единицы, которая заносится в сверхоперативный регистр центрально,. го процессора 7. Если в Заданный момент времени сигнал отсутствует, то в сверхоперативный регистр заносится ноль.
После прохождения всей-кодо.вой таблицы через луч осветителя и срабатывания фотоприемника 11 и отработки микропрограммы анализа поступающих сигналов в одном из сверхоперативных регистров записывается код, соответствующий номеру проходящего 0 состава.
При дальнейшем движении состава срабатывают путевые датчики 2 в.определенной временной последовательности .
5 Информация, поступающая от датчика 4 веса через делитель 5 частоты на вход центрального процессора 7, анализируется, т.е. происходит определение начала импульса, поступаю0 щего от датчика 4 веса.
После определения начала переднего фронта импульса, -поступающего с делителя 5 частоты, центральный процессор 7 вьздает управляющий сигнал C на регистр 6 измерения числа периодов за эталонный отрезок времени tj и на двоичный счетчик 15, предназначенный для занесения в него частоты от кварцевогогенератора 14, которая на два порядка выше частоты датчика 4 веса. После начала занесения импульсов в счетчик 15 центральный процессор 7 выдерживает эталонное время tj и анализирует, совпадает ли конец последнего периода с задан5 ным временем. Если совпадений нет, производится досчет последнего периода до эталонного времени .tj- Таким образом, получаем в регистре 6 количество периодов ненагруженного 0 датчика веса за tj , а в счетчике 15 - соответствующий им код.
По микрокомандам блоков 8 и 9 производится взвешивание ненагруженной платформы с учетом состояния аппара5 туры .и температуры окружающей среды. По окончании tj по команде цент рального процессора 7 происходлт сч тывание содержимого регистра 6 и счетчика 15 в сверхоперативный ре:истр. По следующей микрокоманде в центральном процессоре 7 производит ся операция пересылки этих значений в разные регистры центрального процессора 7, а в дальнейшем деление числа, введенного в центральный про цессор 7 из счетчика 15, на количес во периодов за -t, полученных из ре гистра. 6. Результат этой операции хранится в одном из сверхоперативны регистров. Операция переформировки результатов измерений и деления кода на количество периодов занимает отрезок времени, меньший, чем ij а поэтому после их окончания центральный процессор 7 по микрокомандам блока 9 производит повторное взвешивание пустой платформы. Таких измерений производится не менее четырех, по окончании которых результаты их складываются и сумма делится на четыре. Это позволяет с высокой точностью определить код, соответствующий пустой платформе. Результат, полученный таким образом, хранится в одном из сверхоперативных регистров, а все промежуточные вычисления стираются. И1|тервал измерения веса оси проходя1цего вагона разбивается на учас ки л , т.е. 3, .,.,.п. Между интервалом л-t и эталонным временем измерения пустой платформы устанавливается взаимно однозначное соответствие, T,e. Следовательно, при дальнейших,из мерениях веса, нагружаемого на весо вую платформу, исключение веса пустой платформы осуществляется операцией вычитания этого измерения на каждом субинтервале Л-fc . Поэтому код, полученный и записанный при пр дыдущих измерениях, используется пр каждом измерении за отрезок д-t . Пер вые два из путевых датчиков установ лены на расстоянии более 5 м друг от друга. Следовательно, даже при скорости движения взвешиваемых ваго нов более 15 км/ч при срабатывании первого датчика до срабатывания вто рого датчика имеется время более 1 а это значит, что предыдущее измере гние можно выполнять несколько раз для лучшего контроля нуля. При срабатывании второго путевог датчика блок 3 путевых датчиков выдает управляющий сигнал на первый выход, и он поступает на вход центрального процессора 7, который под управлением микропрограммы производит определение начала периода сигнала датчика 4. веса, поступающего на его вход с в1ЕЛхода делителя 5. Измерение начинается от начала периода и продолжается заданное вре-i мя At . После определения начала периода сигнала датчика 4 веса центральный процессор 7 выдает управляющий сигнал на занесение информации, аналогично предыдущему измерению, в регистр б и счетчик 15. В течение времени д-t обрабатывается несколько периодов N датчика 4 веса, и это число записывается в регистр 6. За этот же промежуток времени в счетчик 15 записывается код, соответствующий этому отрезку измерения. По окончании времени t по микрокомандам блока 8 происходит досчет времени Т до конца последнего периода, если длительность измерения At не совпадает с концом последнего периода измерения на данном отрезке. Измерение частоты датчика 4 веса производится с высокой точностью, так как в счетчик 15 поступает сигнал от кварцевого генератора 14 со значительно больщей частотой, чем от датчика 4, и потеря одного импульса (погрешность дискретности) практически не влияет на точность измерения. По окончании отрезка времени центральный процессор 7 выдает управляющий сигнал счетчику 15 и регистру 6. Соответствующие значения кода и числа периодов поступают каждое в один из сверхоперативных регистров соответственно, происходит сброс счетчика 15 и регистра б, а затем в эти устройства снова заносится информация на следующем отрезке t . После операции вычитания веса ненагруженной платформы по определенному адресу из блока 9 считывается весовой коэффициент в один из сверхоперативных регистров. Затем полученный результат операции вЫчитания умножается на этот весовой коэффициент.- Результат операции умножения хранится в одном из сверхоперативных, регистров центрального процессора 7. При следующем измерении за интервал временила все операции повторяют в описанной последовательности, но весовой коэффициен.т берется из другой, ячейки блока 9. Операции деления, вычитания и умножения выполняются в 1«1икропроцессорном вычислительном устройстве в промежут е времени ai следующего измерения. До окончания времени измерения оси движущехося вагона в одном из сверхоперативных регистров получают сумму всех г измерений данной оси. Так как каждое измерение .умножается на весовой коэффициент, тем самым осуществляется цифровая фильтрация сигнала датчика 4 веса, содержащего наряду с постоянной составляющей. соответствующей весу объекта,также динамическую составляющую, соответст; вующую помехе.Подавление динамической составляющей сигнала тем эффективнее, чем более точно аппроксимируется весовая функция,т.е.в данном сл чае,чем больше взято участков измере ния. После взвешивания первой оси по сигналу из блока 3 производится взвешивание второй оси аналогично предыдущему. Путевые датчики установлены так, что по их сигналам блок 3 определяет тип вагона. Если это четырехосный вагон, то после взвешивания четвертой оси блок 3 выдает сигнал на управляющий выход два и после получения этого сигнала центральный про цессор 7 выполняет операцию сложени четырех измерений и передачу резуль тата в соответствующую ячейку блока 17 в поле номера состава, который имеет ранее записанный признак. При наезде локомотива на весовую платформу алгоритм обработки сигналов путевых датчиков изменяется и блок 3 выдает серию импульсов, по которой микропроцессорное вычислительное устройство переходит к другому участку микропрограммы, т.е. взвешивание оси прекращается и счетчик 15 и регистр 6 устанавливаются в исходное состояние. Этой-же серией импульсов подтверждается исходное состояние триггера 10. Затем центральный процессор 7 выдает упра ляющий сигнал на вход блока 16 врем ни. Происходит считывание времени .окончания взвешивания последнего ва гона в одну из ячеек блока 17. Дале производится выборка номера состава и печатающее устройство 18 производит печать номера состава, а, затем в порядке взвешивания вагонов печат веса каждого вагона и печать веса всего состава.в целом. По окончании печати веса состава центральный про цессор 7 производит выборку времени из блока 17, и печатающее устройство отпечатывает время. Выполнив цик печати, система переходит в режим дежурного ожидания, Если при работе системы были сбо из-за превышения скорости, печатающее устройство 18 производит выбор информации из контрольных ячеек и при печати соответствующего результата печатает специальный символ, В данной микропроцессорной вееризмерительной системе можно предусмотреть хранение тары всех вагонов находящихся в данном составе, и при печати из полученного веса вычитать значение тары. Идентификация соста ва при этом может осуществляться п6 номеру, 10782 55. 8 Для повышения гибкости cиcтo ы в период настрэйки и опытной эксплу атации можно предусмотреть блок клавиатуры, подключаемый к шинам адреса и данным блока 17, чтобы оперативно вносить изменения в информацию хранящуюся в ячейках ОЗУ. Данную микропроцессорную весоиз мерительну{о систему можно использовать и для взвешивания автомобилей. Для этого необходимо уменьшить количество путевых датчиков и в блок 17 с помощью клавиатуры записать другие номера автомобилей и их тару, а также другие весовые коэффициенты, так как спектр динамической помехи системы автомобиль - весы отличается от спектра помехи вагон - весы. Объем программы, хранимой в блоке 9, уменьшается, как и количество ячеек оперативного запоминающего устройства. Микропроцессорную весоизмерительную систему можно реализовать намикропроцессорном комплекте серии К589 и интегральных схемах сеоии К155. Оперативное запоминающее устройство можно выполнить на микросхемах К155РУ2 или К561РУ2. В качаетв.е печатающего устройства можно использовать электронную клавишную вычислительную машину Искра-108Д или печатающий механизм с блоком управления СТРОКА-190 , Точность измерений веса движущегося объекта зависит от величины временного интервала At и выбора весовой функции и дает хорошие результаты с учетом установки нуля перед взвешиванием на скоростях до 1214 км/ч. При скоростях до 18 км/ч точность измерения остается удовлетверительной, По предварительным расчетам точность измерений микропроцессорной весоизмерительной системы возрастет не менее чем в 2-3 раза при скоростях до 10 км/ч по сравнению с электронной весоизмерительной системой 1, Введение отдельных сервисных блоков в микропроцессорную весоизмерительную систему значительно улучшает ее обслуживание и настройку. Программная реализация алгоритма опознавания и взвешивания, а также печати всех перечисленных параметров с учетом времени прохождения, состава через весоконтрольный пункт позволит использовать систему как отдельное локальное звено при организации оперативно-диспетчерского управления. Возможность выдачи всей информации в цифровом виде позволит применять ее при построении систем сбора информации о подвижных объектах и транспортируемой ими массы на горных и горнохимических комбинатах
а также - при создании иерархических систем АСУТП,
Применение данной микропроцессорной весоизмерительной системы обеспечивает существенное повышение точности измерений, надежности в экс плуатации/ снижение энергопотреблё ния и Объема оборудования. Возможность отработки различных алгоритмов
функционирования без изменения аппаратурной части сокращает затраты на разработку, настройку и эксплуатацию, расширяет область применения системы, снижает сроки разработки системы. Указанные факторы обеспечивают получение значительного экономического эффекта от применения описанной микропроцессорной весоизмерительной системы.



| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения производительности ленточного конвейера и устройство для его осуществления | 1982 |
|
SU1167439A1 |
| Автоматическая микропроцессорная весоизмерительная система | 1987 |
|
SU1566226A1 |
| Устройство для взвешивания движущихся объектов | 1984 |
|
SU1273745A2 |
| Устройство для взвешивания движущихся объектов | 1987 |
|
SU1571414A1 |
| Устройство для взвешивания движущихся объектов | 1985 |
|
SU1288506A1 |
| Устройство для взвешивания движущихся объектов | 1984 |
|
SU1183839A1 |
| Система сбора информации о движущемся транспортном средстве | 1981 |
|
SU1194750A1 |
| Устройство для поосного взвешивания вагонов в движении | 1985 |
|
SU1278603A1 |
| Устройство для взвешивания движущихся объектов | 1989 |
|
SU1691689A1 |
| Устройство для потележечного взвешивания железнодорожных вагонов в движении | 1984 |
|
SU1174771A1 |
МИКРОПРОЦЕССОРНАЯ ВЕСОИЗМЕРИТЕЛЬНАЯ СИСТЕМА, содержащая весовую платформу, опирающуюся на частотный датчик веса, путевые цаччикк, две.схемы И, микропроцессорное вычислительное устройство, к входам которого подключен кварцевый генератор, а к выходам - печатающее устройство, блок времени и оперативное запоминающее устройство, о т л и . ч а ,ю щ а я с я тем, что, с целью расвшрения области ее применения и повышения точности взвешивания и надежности, в нее введены фотоприемник опознавания движущегося объекта, блок путевых датчиков, подсоединенный своим входом к путевым датчикам, а выходами - к микропроцессорному вычислительному устройству, делитель частоты датчика веса, триггер управления режимами опознавания, регистр измерения количества периодов датчика веса и счетчик эталонной частоты, причем выход датчика веса подключен через делитель частоты на вход микропроцессорного вычислительного устройства и регистра измерения периодов частоты датчика веса, выходы которого подключены на информационные входы микропроцессорного вычислительного устройства, выход фотоприемника подключен на единичный вход триггера и первые входы схем И, нулевой выход триггера подключен на второй вход первой схемы И, единичный выход - на второй вход второй схеквл И, выход первой схемы И подключен к управляющему входу микро(Л процессорного вычислительного устройства, выход второй схемы И подключен на третий вход микропроцессорного вычислительного устройства, выход блока путевкх датчиков подключен на нулевой вход триггера, выходы счетчика эталонной частоты подключены на вторые информационные входы микропроцессорного вычисли:Тельного устройства, управляющий выход которого подключен на вход регистра измерения количества периодов датчика веса и счетчика эталонной частоты, при этом второй выход кварцевого генератора подключен к входам счетчика и блока времени, а информационные выходы блока времени подключены к входу оперативного запоминающего устройства.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для взвешивания железнодорожных составов | 1977 |
|
SU699346A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР по заявке № 3216072/18-10 кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
