Изобретение относится к области ихтиологии, а именно к системам для изучения миграций рыб в естественных условиях с помощью гидроакустических меток.
Цель изобретения - повышение дальности действия системы в морской воде, возможности изучения тем самым воздействия на миграции рыб кратковременных раздражителей и обеспечение более детального исследования поведения рыб в естественных условиях.
Повышение дальности действия системы имеет важное значение для подводной биотелеметрии и исследования поведения гидробионта в естестзенных условиях в зависимости от его физиологического состояния и факторов окружаюш,ей среды, использования полученных сведений для повышения интенсивности промыслового рыболовства.
На чертежЕ изображена структурная схема предлагаемой системы.
Система для изучения миграций рыб в естественных условиях содержит установленную на рыбе гидроакустическую метку 1 в виде герметичного корпуса обтекаемой формы, в котором смонтированы источники 2 и 3 звуковых колебаний, работающие на разных звуковых частотах, пространственно направленную звуковую антенну 4 с индикаторами азимута и угла места, первый 5 и второй 6 фильтры, первый 7 и второй 8 амплитудные детекторы, первый 9 и второй 10 логарифмические усилители, сумматор 11, инвертор 12, линейный усилитель 13 и индикатор 14 дальности.
Примером конкретного выполнения системы может служить система «Бионт, сос- тояш,ая из метки для рыб, содержащей два источника импульсов звуковых колебаний с частотами заполнения 19,7 и 50 кГц, запускаемых синхронно через каждые 0,01 с, и приемника с двумя широкополосными гидрофонами, расположенными с целью получения пространственной направленности на расстоянии 0,2 м друг от друга и установленными в обдем для них выдвижном устройстве гидролокатора «Лещ. Выход одного из гидрофонов нагружен на резонансный усилитель самописца гидролокатора «Палтус, а выход другого - на аналогичный усилитель самописца гидролокатора «Леш. Звуковые выходы каждого из усилителей нагружены на амплитудные детекторы, которые, в свою очередь, нагружены на одинаковые диоднорезистивные аппрок- симаторы, обладающие коэффициентами передачи, измгняюшимися по логарифмическому закону в зависимости от уровня сигнала на выходах усилителей. Выход одного из аппроксиматоров нагружен на резистив- ный сумматор непосредственно, а второго через инвертор. Выход сумматора через линейный усилитель напряжения подключен к миллизольтметру М265М, который
-
используется в качестве индикатора дальности.
Система работает следуюш.им образом. Гидроакустическая метка 1, установленная на рыбе, излучает одновременно две звуковые посылки от источников 2 и 3. Обе звуковые посылки распространяются в водной среде, и на входе звуковой антенны каждая из них создает звуковое давление,
которое с учетом затухания на пути между меткой и антенной определяется следуюш.им соотношением:
p,-.pjf
(1)
где РО - звуковое давление, создаваемое каждым из источников на расстоянии Го 1 м;
Р 0,036f -коээфициент затухания 0звуковой энергии в водной среде
на частоте излучения, равной f. С выхода звуковой антенны 4 электрические сигналы, пропорциональные звуковому давлению, создаваемому соответствую- ш,ими сигналами от источников 2 и 3 звуковых колебаний в метке, поступают на входы фильтров 5 и 6. Па выходах фильтров 5 и 6 выделяются сигналы с частотами, соответствуюш,ими частотам источников 2 и 3, которые подаются на амплитудные детек- Q торы 7 и 8. Коэффициенты передачи амплитудных детекторов выбраны таким образом, чтобы при одинаковых звуковых давлениях на входе звуковой антенны от источников 2 и 3 на расстоянии го амплитуды напряжений сигналов на выходах детекторов 7 и 8 были одинаковыми. В этом случае на расстоянии г отношение выходных напряжений на выходах детекторов 7 и 8 с учетом выражения (I) определяется следующим соотношением
40
- jioO P ч)
(2)
где р2 - затухание энергии звуковых колебаний от источника с частотой из- 45лучения h ,
PI - затухание энергии звуковых колебаний от источника с частотой излучения fi.
Из соотношения (2) выражение для рас- 50 стояния между рыбной меткой и приемной звуковой антенной определяется в виде
1
55
2(Р 2-р i) K(lgU, - IgUa),
(lgU,-lgU2)
(3)
где К
1
2(р
Таким образом, для определения расстояния г необходимо произвести операции, соответствующие выражению (3). Для этой цели служат первый 9 и второй 10 логарифмические усилители, инвертор 12, сумматор 11, линейные усилители 13. Сигнал с выхода первого амплитудного детектора 7 усиливается логарифмическим усилителем и подается на сумматор И. Сигнал с выхода второго амплитудного детектора 8 усиливается вторым логарифмическим усилителем 10 и подается на этот же сумматор 11 через инвертор 12. На выходе сумматора 11 образуется сигнал, пропорциональный разности логарифмов напряжений от каждого из звуковых сигналов, излучаемых источниками 2 и 3 в корпусе метки. Полученная разность усиливается с помощью линейного усилителя 13 в К раз, после чего напряжение, соответствующее расстоянию г между рыбной меткой и прием- ной звуковой антенной 4, поступает на индикатор 14 дальности.
С помощью предлагаемой системы исследовали реакцию рыб на световые раздражители. Использование ее позволило изучить особенности воздействия кратковременных световых раздражителей на миграции рыб. В частности, удалось зафиксировать реакции рыб в виде бросков на расстояние до 10 м длительностью 0,05-0,1 с при расположении приемной аппаратуры на расстоянии свыше 100 м от исследуемой меченой рыбы.
Приемная аппаратура удалена от рыбы, поэтому не влияет на естественное поведение последней, что повыщает чистоту проводимого эксперимента.
Формула изобретения
Система для изучения миграций рыб в естественных условиях, содержащая гидроакустическую метку для рыб в виде герметичного корпуса, в котором размещены два источника колебаний, один из которых представляет собой источник звуковьЕХ колебаний, фильтр, амплитудный детектор, индикатор дальности и пространственно направленную приемную звуковую антенну с индикаторами азимута и угла наклона, соединенную через фильтр с входом амплитудного детектора, отличающаяся тем, что, с целью повышения дальности действия системы в морской воде, возможности изучения тем самым воздействия на рыб кратковременных раздражителей и обеспечения более детального исследования поведения рыб в естественных условиях, она снабжена вторым фильтром, вторым амплитудным
детектором, двумя логарифмическими усилителями, инвертором и линейным усилителем, а в качестве второго источника колебаний использован источник звуковых колебаний, работающий на частоте, отличной от частоты первого источника звуковых колебаний, при этом вход второго амплитудного детектора через второй фильтр соединен со звуковой антенной, выходы первого и второго амплитудных детекторов соединены соответственно с входами первого
и второго логарифмического усилителей, выход первого логарифмического усилителя соединен с первым входом сумматора, выход второго логарифмического усилителя подключен через инвертор к второму входу сумматора, выход которого соединен с входом
линейного усилителя, а выход последнего соединен с индикатором дальности.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОЧАСТОТНЫЙ ГИДРОЛОКАТОР БОКОВОГО ОБЗОРА | 2017 |
|
RU2689998C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2008692C1 |
| ПАРАМЕТРИЧЕСКИЙ ЭХО-ИМПУЛЬСНЫЙ ЛОКАТОР | 1996 |
|
RU2133047C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИСТЕМА ПАРАМЕТРИЧЕСКОГО ПРИЕМА ВОЛН РАЗЛИЧНОЙ ФИЗИЧЕСКОЙ ПРИРОДЫ В МОРСКОЙ СРЕДЕ | 2011 |
|
RU2472116C1 |
| ФАЗОВЫЙ ПАРАМЕТРИЧЕСКИЙ ГИДРОЛОКАТОР БОКОВОГО ОБЗОРА | 1992 |
|
RU2039366C1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ СИГНАЛОВ | 1992 |
|
RU2042149C1 |
| ФАЗОВЫЙ ПАРАМЕТРИЧЕСКИЙ ГИДРОЛОКАТОР | 1995 |
|
RU2097785C1 |
| СПОСОБ ДАЛЬНЕГО ОБНАРУЖЕНИЯ И ОТПУГИВАНИЯ КИТОВ ОТ СКОРОСТНЫХ ПАССАЖИРСКИХ СУДОВ | 2007 |
|
RU2342680C2 |
| СПОСОБ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ ПРИ ПОИСКЕ УГЛЕВОДОРОДОВ И СПОСОБ ОПРЕДЕЛЕНИЯ ЗАЛЕГАНИЯ ПРОДУКТИВНЫХ НА УГЛЕВОДОРОДЫ ПЛАСТОВ И СЕЙСМИЧЕСКАЯ СТАНЦИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2433425C2 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ И ПЕЛЕНГОВАНИЯ ГИДРОАКУСТИЧЕСКИХ ИЗЛУЧЕНИЙ МОРСКИХ БИОЛОГИЧЕСКИХ ОБЪЕКТОВ | 1999 |
|
RU2154286C1 |
Изобретение относится к ихтиологии, используется для изучения миграций рыб в естественных условиях и направлено на . вышение дальности действия в морской iKbu;. возможности изучения воздействия на рыб кратковременных раздражителей и обеспечение более детального исследования поведения рыб в естественных условиях. Система содержит гидроакустическую метку для рыб в виде герметичного корпуса, в котором размещены два источника 2, 3 звуковых колебаний, работающих на разных частотах, приемную звуковую антенну 4 с индикаторами азимута и угла наклона, два фильтра 5, 6, два амплитудных детектора (.АД) 7, 8, два логарифмических усилителя (ЛУ) 9, 10, сумматор (С) 11, инвертор 12. линейный усилитель 13, индикатор дальности 14. Входы фильтров 5 и 6 связаны с антенной 4, а их выходы - с входами АД 7 и 8, выходы АД 7 и 8 - с входами ЛУ 9 и 10. Выход ЛУ 9 соединен с первым входом С 11, выход ЛУ 10 подключен к второму входу С 11 через инвертор 12. Выход С 11 соединен с входом линейного усилителя 13, а выход последнего соединен с индикатором дальности 14. 1 ил. ) (Л со Ci С5 СО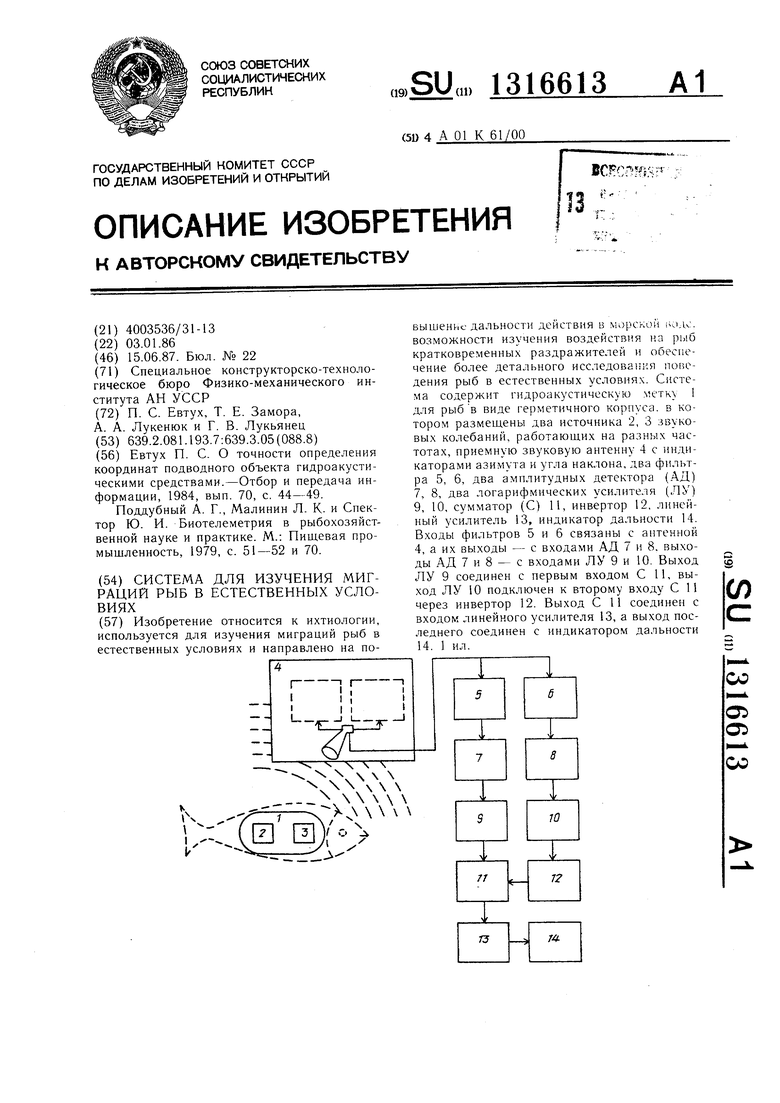
| Евтух П | |||
| С | |||
| О точности определения координат подводного объекта гидроакустическими средствами.-Отбор и передача информации, 1984, вып | |||
| Деревянный торцевой шкив | 1922 |
|
SU70A1 |
| Приспособление для плетения проволочного каркаса для железобетонных пустотелых камней | 1920 |
|
SU44A1 |
| Поддубный А | |||
| Г., Малинин Л | |||
| К | |||
| и Спек- тор Ю | |||
| И | |||
| Биотелеметрия в рыбохозяйст- венной науке и практике | |||
| М.: Пищевая промышленность, 1979, с | |||
| Способ запрессовки не выдержавших гидравлической пробы отливок | 1923 |
|
SU51A1 |
