Изобретение относится к астрономическим наблюдениям, может найти применение, например, при управлении зеркалом радиотелескопа и является усовершенствованием изобретения по авт.св. № 469123.
Целью изобретения является повышение точности привода.
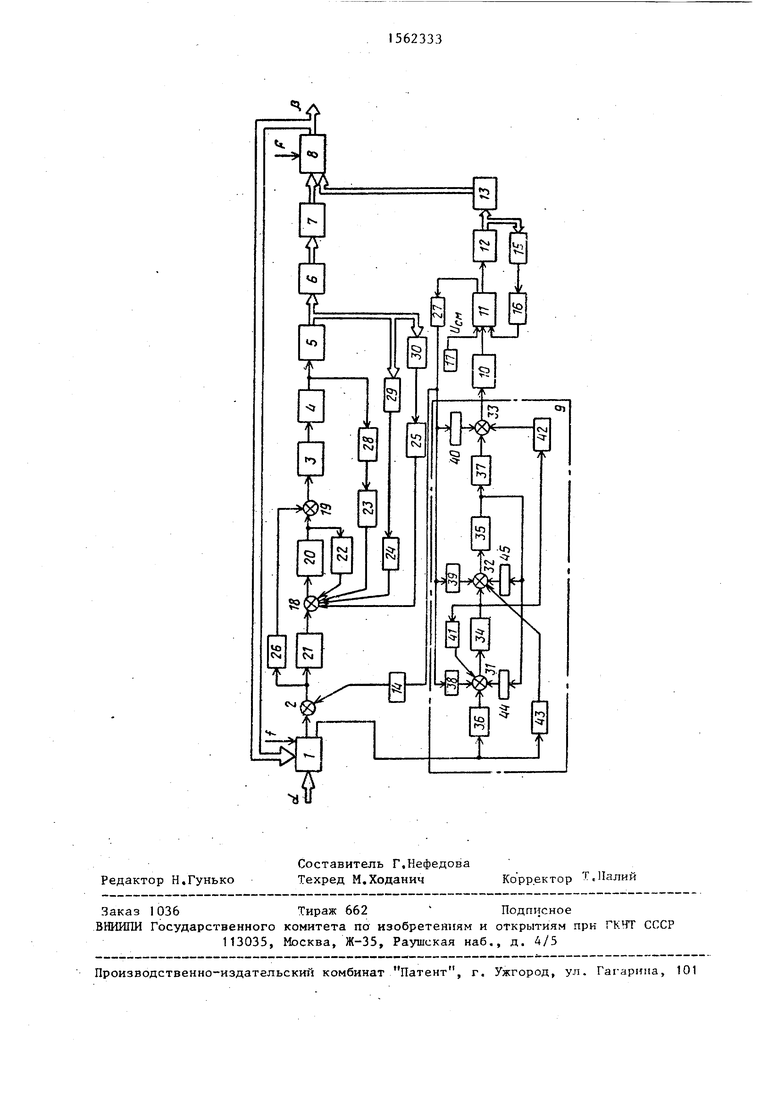
На чертеже приведена структурная схема привода.
Электропривод содержит измерительный элемент 1, первый сумматор 2,промежуточный усилитель 3, усилитель 4 мощности,исполнительный двигатель 5, основной редуктор 6, опорно-поворотное устройство 7s объект 8 управле- ния, корректирующий блок 9, усилитель 0 с ограничением, регулятор 11 тока, всмопогательный двигатель 12, вспомогательный редуктор 13,пропорционально-интегральный блок 14, первый датчик 15 скорости, блок 16 ij-ибкой обратной связи, источник 17 Лостоянного сигнала, второй и третий Сумматоры 18 и 19, интегратор 20, йервый - шестой масштабные усилители 21 - 26, первьй и второй датчики 27 и 2Р тока, второй датчик 29 скорого дат« гк 30 положения, первый,второй ч т; тий суммирующие элементы 31,32 т 33, первый и второй интегрирующие Элементы 34 и 35, первьй - десять : (масштабирующие элементы 36 - 45, F(t) - ветровая нагрузка f(t) - потеха измерения.
Случайными сигналами, действующи- ми на привод, является ветровая нагрузка F(t), действующая непосредственно на объект Я управления, полез- Йый сигнал of(t) при сопровождении подвижных объектов (хотя при работе (й режиме программного управления задающее воздействие формируется по
iпрограмме) ., случайные помехи ичмьре- 11
ккя, обусловленные работой измерительного элемента 1. Сигнал fл(t) Йа выходе измерительного элеманта 1 Ножет быть представлен в вида суммы сигнала рассогласования Ј(t) и помехи измерения f(t):
) Ј(t) + f(t).
Следящий электропривод по существу состоит из двух канатов управления: основного и вспомогательного, В основной канал управления входят пер вьй сумматор 2, промежуточный усилитель 3, опорно-поворотное устройство 7, второй и третий сумматоры 18 и 19, интегратор 204 первьй - шестой масштабные усилители 21 - 26,второй датчик 28 тока, второй датчик 29 скорости, датчик 30 положения. Во вспомогательный канал управления входят корректирующий блок 9, усилитель 10 с ограничением,, регулятор И тока, вспомогательный двигатель 12, вспомогательный редуктор 13,пропорционально- интегральный блок 14„ п арвый датчик 15 скорости, блок 1й
0
5
5
гибкой обратной связи, источник 17 постоянного сигнала.
Измерительный элемент 1 и объект управления 8 входят в состав основного и вспомогательного каналов управления.
Следящий электропривод работает следующим образом.
Основной канал управления функционирует как обычная следящая система с одним измерительным элементом, которьй выделяет рассогласование между задающим воздействием ci{(t) и выходной координатой p(t) следящего привода. Сигнал, пропорциональный этому рассогласованию, с выхода измерительного элемента 1 через первьй сумматор 2, первьй масштабный усилитель 21, второй сумматор 18, интегратор 20, третий сумма- гор 19, промежуточный усилитель 3 и усилитель 4 мощности подается на исполнительный двигатель 5, которьй через основной редуктор 6 и опорно- поворотное устройство 7 разворачивает регулятор t1 тока таким образом, чтобы уменьшить величину рассогласования между задающим воздействием и выходной координатой следящего привода. Для осуществления желаемых динамических характеристик основного канала регулирования по сравнению с прототипом в систему, кроме интегратора 20, дополнительно введены второй датчик 28 тока, измеряющий ток в якорной цепи дополнительного двигателя 5 на выходе усилителя 4 мощности, второй датчик 29 скорости и датчик 30 положения, изменяющие скорость и угол поворота вала исполнительного двигателя 5. Причем входы второго сумматора 18 соединены с выходами интегратора 20, второго датчика 28 тока, второго датчика 29 скорости и датчика 30 положения через соответственно, второй 22, третий 23,четвертый 24 и пятый 25 масштабные усилители, а второй вход третьего сумматора, 19 соединен с выходом первого сумматора 2 через масштабный усилитель 26, что обуславливает повышение точности слежения за случайным задающим воздействием oC(t) при его измерении со случайной помехой f(t) и компенсации случайного возмущающего воздействия F(t) с помощью основного какала
51
При появлении динамических ошибок отработки быстроменяющегося задающего воздействия of ft) и компенсации возмущающего воздействия F(t) сигнал с выхода измерительного элемента 1 через первый масштабирующий элемент 36, первый суммирующий элемент 31, первый интегрирующий элемент 34,второй масштабирующий элемент 37,третий суммирующий элемент 33, входящие в состав корректирующего блока 9, и усилитель 10 с ограничением и регулятор 1 тока, подается на вспомогательный двигатель 12, который через вспомогательный редуктор 13 довора- чивает объект 8 управления в пределах упругих деформаций опорно-поворотного устройства 7 и основного редуктора 6 с целью уменьшения величины динамической ошибки всего привода. Перекрестная связь по току, содержащая первый датчик 27 тока, измеряющий ток регулятора 11 тока в якорной цепи вспомогательного двигателя 12, через пропорционально-интегральный блок 14 подает сигнал на второй вход первого сумматора 2 и тем самым перераспределяет все статические и низкочастотные нагрузки из вспомогательного канала на основной. Гибкая обратная связь по скорости вспомогательного двигателя 12, реализуемая 4 с помощью первого датчика 15 скорости, подается на второй вход регулятора 11 тока через блок 16 гибкой обратной связи, позволяет гасить механические колебаний объекта управления 8 на резонансных частотах,обусловленные слабодемпфированными звенья ми упругой системы: исполнительный двигатель 5 - основной редуктор 6 - опорно-поворотное устройство 7 - объект 8 управления. Выбор мертвого хода вспомогательного редуктора 13 вспомогательного двигателя 12 обеспечивается подачей на третий вход регулятора 11 тока постоянного напряжения смещения 11СЛ, с выхода источника 17 постоянного сигнала,пропорционального моменту выбора мертвого хода.
Осуществление желаемых динамических характеристик вспомогательного канала достигается за счет выбора вида конкретной реализации корректирующего блока 9, который содержит последовательно соединенные первый масштабирующий элемент 36, первый сумми623336
рующий элемент 31, первый интегрирующий элемент 34, второй суммирующий элемент 32, второй интегрирующий элемент 35, второй масштабирующий элемент 37, причем выходной сигнал первого датчика тока подается на вторые входы первого, второго, третьего суммирующих элементов 31,32 и 33 через
10 соответственно, третий, четвертый и пятый масштабирующие элементы 38,39 и 40, выходной сигнал второго интегрирующего элемента 34 подается на третьи входы первого и третьего сум15 мирующих элементов 31 и 33 через
шестой и седьмой масштабирующие элементы 41,42, сигнал с второго выхода измерительного элемента I подается на вход первого масштабирующего эле20 мента 36 и через восьмой масштабирующий элемент 43 на третий вход второго суммирующего элемента 32, выходной сигнал второго интегрирующего элемента 35 подается на четвертые входы
25 первого и второго суммирующих элементов 31 и 32 через девятый и десятый масштабирующие элементы 44 и 45 соответственно, что обуславливает повышение точности слежения привода за
30 случайным задающим воздействием
dJ(t) при его измерении со случайной помехой f(t) и компенсации случайного возмущающего воздействия F(t) с помощью следящего электропривода
,5 за счет компенсации с помощью вспомогательного канала динамических ошибок, оставшихся после работы основного канала.
Таким образом, в предлагаемом 40 электроприводе реализуются оптимальные настройки регуляторов основного и вспомогательного каналов, что позволяет минимизировать дисперсию его ошибки следящего электропривода при
Д5 учете ограничений на управление и переменные состояния исполнительных двигателей каналов управления и действий на него случайных возмущающих воздействий и за счет этого повысить
5Q его точность.
Формула изобретения
1. Следящий электропривод наведе- сс ция механической системы по авт.св. № 469123, отличающийся тем,что, с целью повышения точности привода при случайных возмущениях, в него дополнительно введены шесть I
масштабных усилителей, датчик полоения, два датчика скорости, два атчика тока, источник постоянного сигнала, блок гибкой обратной связи, интегратор, два сумматора, причем выход первого сумматора подключен к входу промежуточного усилителя через последовательно соединенные первый масштабный усилитель, второй сумма- jg тор, интегратор и третий сумматор, аыход регулятора тока подключен к входу пропорционально-интеграль- {юго блока- через первый датчик тока, выход вспомогательного дви- 15 гателя через последовательно со диненные первый датчик скоро ти и блок гибкой обратной сгязи подключен к второму входу регулятора токаs соединенного третьим JQ входом с выходом источника постоянного сигнала, выход интегратора через второй масштабный усилитель подключен к второму входу второго сумматора, выход усилителя мощности че- 25 рез последовательно соединенные второй датчик тока и третий масштабный усилитель подключен к третьему входу второго сумматора, выход исполнительного двигателя через последователь- 30 но соединенные второй датчик скорости и четвертый масштабный усилитель, а также через последовательно соединенные датчик положения и пятый масштабный усилитель подключен к четвертому и к пятому входам второго сум- матора, выход первого сумматора через шестой масштабньй усилитель подключен к второму входу третьего сум35
0
5
матора, выход первого датчика тока соединен с вторым входом корректирующего блока.
2 о Электропривод по п,1, отличающийся тем, что корректирующий блок содержит последовательно соединенные первый масштабньй элемент, первый суммирующий элемент,первый интегрирующий элемент, второй суммирующий элемент, второй интегрирующий элемент, второй масштабный элемент и третий суммирующий элемент, а также третий, четвертый и пятьй масштабные элементы, входы которых объединены, а выходы подключены к вторым входам соответственно первого, второго и третьего суммирующих элементов, шестой и седьмой масштабные элементы, входы которых соединены с выходом второго интегрирующего элемента, а выходы - с третьими входами соответственно первого и третьего суммирующих элементов, восьмой масштабньй элемент, вход которого соединен с входом первого масштабного элемента, а выход - с третьим входом второго суммирующего элемента,девятый и десятый масштабные элементы, входы которых соединены с выходом второго интегрирующего элемента, а выхрды - с четвертыми входами соответственно первого и второго суммирующих элементов входы первого и третьего масштабирующих элементов и выход третьего суммирующего элемента являются первым и вторым входом и выходом корректирующего блока.
| название | год | авторы | номер документа |
|---|---|---|---|
| Трехканальная следящая система | 1989 |
|
SU1716479A1 |
| Система автоматического сопровождения телескопа | 1989 |
|
SU1725181A1 |
| Система управления | 1983 |
|
SU1120283A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
| Нелинейное корректирующее устройство | 1987 |
|
SU1536351A1 |
| Регулятор давления жидкости | 1988 |
|
SU1536359A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1996 |
|
RU2111521C1 |
| СПОСОБ ГРУБОГО УПРАВЛЕНИЯ ПРОСТРАНСТВЕННЫМ ДВИЖЕНИЕМ САМОЛЕТА И СИСТЕМА ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2587773C2 |
| Двухканальная следящая система с разделенной нагрузкой | 1987 |
|
SU1425597A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
Изобретение относится к технике астрономических наблюдений, может найти применение, например, при управлении зеркалом радиотелескопа и является усовершенствованием устройства по авт.св.N469123. Целью изобретения является повышение точности привода. Привод по основному авт.св. содержит основной и вспомогательный каналы регулирования с перекрестной обратной связью с выхода регулятора вспомогательного канала на вход основного канала через пропорционально-интегральный блок. Поставленная цель достигается за счет того, что в качестве регулятора основного канала использован интегратор, который охвачен обратный связью и на вход которого подаются сигналы обратной связи по положению, скорости и току, а выходной его сигнал суммируется с компенсирующей связью по входному сигналу основного канала регулирования, а также за счет особенностей реализации корректирующего блока вспомогательного канала регулирования. Прямой канал корректирующего блока содержит последовательно соединенные первый масштабный элемент, первый суммирующий элемент, первый интегрирующий элемент, второй суммирующий элемент, второй интегрирующий элемент, второй масштабирующий элемент и третий суммирующий элемент, отдельные элементы которого соединены между собой прямыми и обратными связями через масштабные элементы. Указанные обстоятельства позволяют использовать оптимальные настройки регуляторов основного и вспомогательного каналов, что, в свою очередь, позволяет минимизировать дисперсию ошибки следящего электропривода при учете ограничений на управление им переменные состояния исполнительных устройств каналов управления в условиях случайных полезных сигналов, возмущающих воздействий и помех измерения. 1 з.п. ф-лы, 1 ил.
1Ь{
J
| Следящий электропривод наведения механической системы | 1974 |
|
SU469123A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
