Изобретение относится к электротехнике, может быть использовано в электроприводах поточных линий, оснащенных унифицированными системами прямого регулирования натяжения обрабатываемого упругого материала (бумажного полотна, металлической полосы и др.), и является усовершенствованием изобретения по авт. св. № 1163449.
Цель изобретения - повышение стабильВ области скоростей VH V VK (VK, VH - критическая и нижняя скорости электропривода) электропривод представляет собой колебательное звено с коэффициентом демпфирования |о V, а в области VK V VB (VB - верхняя скорость электропривода) становится апериодическим звеном второго порядка с постоянными времени Ti и Т2. При этом по мере увеличения скорости от VK до Ув постоянности работы электропривода в зоне высо- Ю ная времени TI возрастает, что обуслав- ких скоростей.ливает деформацию ЛАХ Wpo и ЛФХ фро
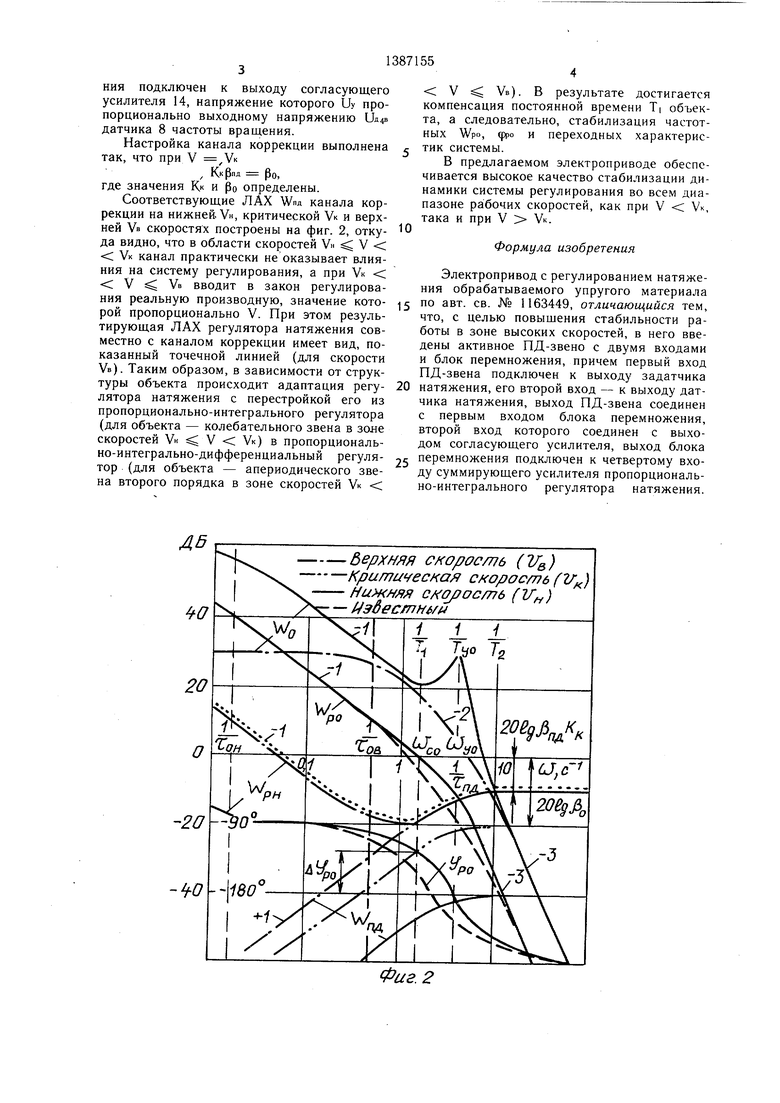
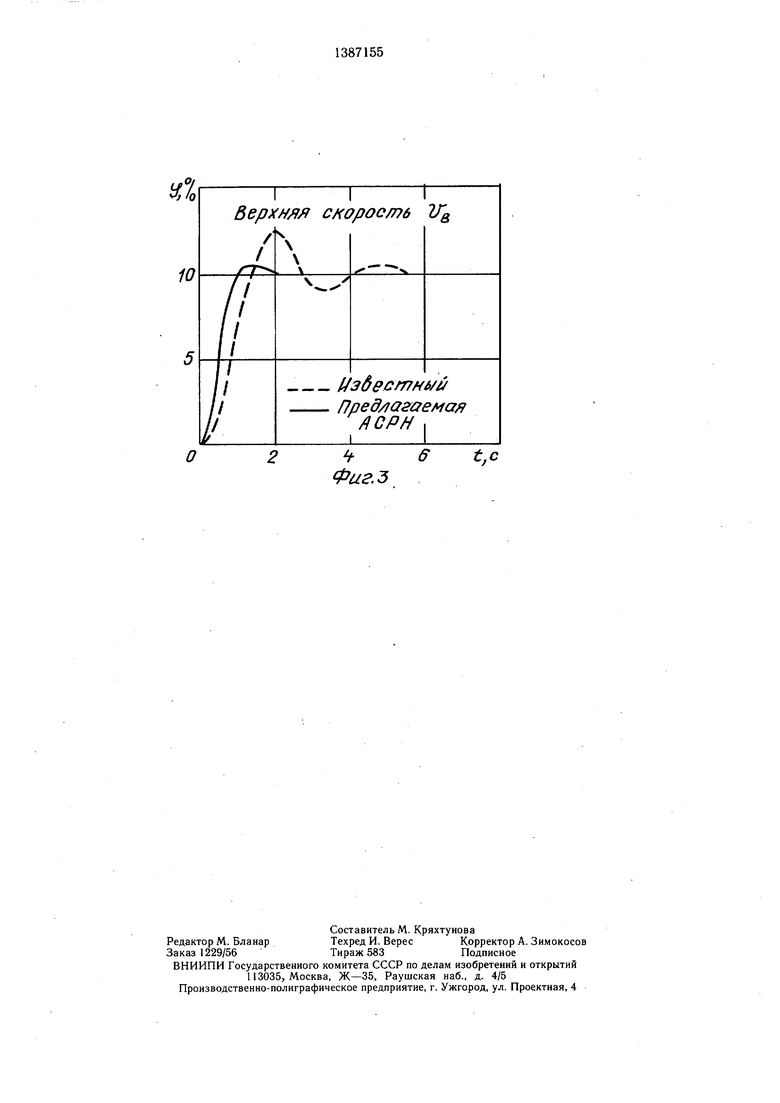
На фиг. 1 представлена функциональная схема электропривода; на фиг. 2 - логарифмические частотные характеристики; на
разомкнутого контура натяжения в зоне существенных частот со снижением частоты среза OJCO и запаса по фазе Д фро (фиг. 2, харакфиг. 3 - переходные функции системы. теристики, показанные пунктирными линияЭлектропривод содержит электродвига- ми). Это приводит к существенному увели- тель 1 постоянного тока, подключенный к чению длительности и колебательности пе- вентильному преобразователю 2, в цепь уп- реходных процессов в известном электропри- равления которого включены задатчик 3 воде на верхних скоростях, натяжения и последовательно соединенныеДля стабилизации динамики системы
адаптивный пропорционально-интегральный 20 введено адаптивное корректирующее устрой- регулятор 4 натяжения, регулятор 5 частоты ство, состоящее из активного ПД-звена 16
25
оВо ,
2К.Р
Юуо
K,-V,,
VH
вращения и регулятор 6 тока, вторые входы которых соединены соответственно с выходами датчиков натяжения 7, частоты вращения 8 и тока 9. Регулятор натяжения выполнен в виде параллельно включенных пропорционального 10 и интегрирующего 11 усилителей, соединенных своими выходами с первым и вторым входами суммирующего усилителя 12, а также подключенного к входу интегратора блока 13 перемно- on гдеро тг-т жения, соединенного своими входами соот- ветственно с выходом датчика натяжения и через согласуюший усилитель 14 - с выходом датчика частоты вращения. В регулирующую часть входит корректирующая ре- зистивно-емкостная цепь 15, один из выводов которой подключен к выходу согласующего усилителя, а другой вывод - к третьему входу суммирующего усилителя. Электропривод содержит также активное пропорционально-дифференциальное ПД-зве- но 16 с двумя входами и блок 17 пе- 40 ремножения, причем первый вход ПД-звена 16 подключен к выходу задатчика 3 натяжения, его второй вход - к выходу датчика 7 натяжения, выход ПД-звена 16 соединен с первым входом блока 17 перемножения, второй вход которого соединен с выходом согласующего усилителя 14, а выход блока 17 перемножения подключен к чети блока 17 перемножения, а коэффициент передачи ПД-звена 16 рпд и его постоянная времени тпд определяются из условия
Тпд
1
(Оуо
-динамический коэффициент усиления регулятора натяжения;
-нижняя скорость движения материала;
35
(Оуо
- -LJLJ-1 -частота упругих колеТб
КЕ.
баний второго рода;
Кц, , Тб
Тм5
45
вертому входу суммирующего усилителя 12.
Электропривод работает следующим об- 50 разом.
Изменение скорости электропривода линии, осуществляемое с помощью напряжения U34B, обуславливает вариацию характеристик объекта регулирования контура натяжения (ЛАХ Wo, фиг. 2). Принтом про- 55 исходит деформация ЛАХ объекта как в зоне нижних частот, так и в окрестности частоты упругих колебаний шуо.
-механико-технологические параметры и постоянная времени натяжения материала;
-механическая постоянная времени электропривода;
К - коэффициент передачи обратной связи контура натяжения. Передаточная функция канала коррекции
Wn.(p) KKpn.-5,
где Кк коэффициент коррекции, реализуемый блоком 17 перемножения.
Значение К пропорционально диапазону изменения скорости электропривода, поскольку второй вход блока 17 перемножеВ области скоростей VH V VK (VK, VH - критическая и нижняя скорости электропривода) электропривод представляет собой колебательное звено с коэффициентом демпфирования |о V, а в области VK V VB (VB - верхняя скорость электропривода) становится апериодическим звеном второго порядка с постоянными времени Ti и Т2. При этом по мере увеличения скорости от VK до Ув постоянная времени TI возрастает, что обуслав- ливает деформацию ЛАХ Wpo и ЛФХ фро
гдеро тг-т
и блока 17 перемножения, а коэффициент передачи ПД-звена 16 рпд и его постоянная времени тпд определяются из условия
оВо ,
Р- гдеро тг-т
Тпд
(Оуо
2К.Р
Юуо
-V,,
VH
тг-т
-динамический коэффициент усиления регулятора натяжения;
-нижняя скорость движения материала;
гдеро тг-т
(Оуо
- -LJLJ-1 -частота упругих колеТб
КЕ.
баний второго рода;
гдеро тг-т
Кц, , Тб
Тм5
-механико-технологические параметры и постоянная времени натяжения материала;
-механическая постоянная времени электропривода;
К - коэффициент передачи обратной связи контура натяжения. Передаточная функция канала коррекции
Wn.(p) KKpn.-5,
где Кк коэффициент коррекции, реализуемый блоком 17 перемножения.
Значение К пропорционально диапазону изменения скорости электропривода, поскольку второй вход блока 17 перемножения подключен к выходу согласующего усилителя 14, напряжение которого Uy пропорционально выходному напряжению ид4в датчика 8 частоты вращения.
Настройка канала коррекции выполнена так, что при V ,VK
ро,
где значения Кк и ро определены.
Соответствующие ЛАХ Wnfl канала коррекции на нижней. VH, критической VK и верхней VB скоростях построены на фиг. 2, откуда видно, что в области скоростей V V
VK канал практически не оказывает влияния на систему регулирования, а при VK ;
V VB вводит в закон регулирования реальную производную, значение которой пропорционально V. При этом результирующая ЛАХ регулятора натяжения совместно с каналом коррекции имеет вид, показанный точечной линией (для скорости VB). Таким образом, в зависимости от структуры объекта происходит адаптация регулятора натяжения с перестройкой его из пропорционально-интегрального регулятора (для объекта - колебательного звена в золе скоростей VK V ; VK) в пропорциональ- но-интегрально-дифференциальный регулятор (для объекта - апериодического звена второго порядка в зоне скоростей VK
0
5
0
5
V VB). В результате достигается компенсация постоянной времени T| объекта, а следовательно, стабилизация частотных Wpo, фро и переходных характеристик системы.
В предлагаемом электроприводе обеспечивается высокое качество стабилизации динамики системы регулирования во всем диапазоне рабочих скоростей, как при V VK, така и при V VK.
Формула изобретения
Электропривод с регулированием натяжения обрабатываемого упругого материала по авт. св. № 1163449, отличающийся тем, что, с целью повышения стабильности работы в зоне высоких скоростей, в него введены активное ПД-звено с двумя входами и блок перемножения, причем первый вход ПД-звена подключен к выходу задатчика натяжения, его второй вход - к выходу датчика натяжения, выход ПД-звена соединен с первым входом блока перемножения, второй вход которого соединен с выходом согласующего усилителя, выход блока перемножения подключен к четвертому входу суммирующего усилителя пропорционально-интегрального регулятора натяжения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод с регулированием натяжения обрабатываемого упругого материала | 1983 |
|
SU1163449A1 |
| Частотно-регулируемый электропривод | 1989 |
|
SU1798884A1 |
| Устройство для управления электроприводом постоянного тока | 1978 |
|
SU736320A1 |
| Электропривод постоянного тока | 1983 |
|
SU1115188A1 |
| Электропривод постоянного тока | 1984 |
|
SU1228208A2 |
| Адаптивная система управления с нестационарным упругим механическим объектом | 1984 |
|
SU1188697A1 |
| Устройство для автоматического регулирования толщины полосы на прокатном стане | 1990 |
|
SU1729643A1 |
| Устройство для демпфирования колебаний в электроприводе с упругой связью между двигателем и механизмом | 1977 |
|
SU736317A1 |
| Электропривод моталки стана холодной прокатки | 1975 |
|
SU535699A1 |
| Устройство для управления асинхронным электроприводом лифта | 1979 |
|
SU773883A1 |
Изобретение относится к электротехнике и может быть использовано для управления электродвигателями поточных линий. Целью изобретения является повышение стабильности работы электропривода в зоне высоких скоростей. Электропривод содержит последовательно соединенные ПД- звено 16 и блок 17 перемножения, выход которого соединен с четвертым входом суммирующего усилителя 12. Первый вход ПД- звена 16 соединен с выходом задатчика 3 натяжения. Второй вход ПД-звена 16 соединен с выходом датчика 7 натяжения. В данном устройстве происходит адаптация регулятора натяжения с перестройкой его из ПИ-регулятора в ПИД-регулятор, в результате чего достигается компенсация постоянной времени объекта. 3 ил. а (Л со 00 ел СП N) Vy
верхняя ско/ осл7б (У)
Kpuf77Uf/ecf aff скоростб
- HU f Hfffl с А ff/ ОС/776 (и„)
- l 3decfnHf,ffj
20
О
-20
W
Фиг. 2
О
6 t,c
ФигЗ
| Электропривод с регулированием натяжения обрабатываемого упругого материала | 1983 |
|
SU1163449A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
