Изобретение относится к электротехнике, а именно к частотно-регулируемому электроприводу на базе синхронного двигателя с электромагнитным возбуждением, может быть использова- но для регули рования скорости нагрузки и является усовершенствованием изобретения по авт.св. № 1108596.
Цель изобретения - повьшение точности регулирования за счет коррек- ции углового положения результирующего вектора тока статора синхронного двигателя.
На фиг.1 представлена функциональная схема частотно-регулируемого син- кронного электропривода; на фиг.2 - схема блока преобразования числа фаз; на фиг.З и 4 - схема блоков тригонометрических преобразований; на фиг,5 - векторная диаграмма синхрон- jHoro двигателя.
Частотно-регулируемый синхронный электропривод содержит синхронный двигатель 1 с электромагнитным воз- буждением (фиг.1), обмотки статора которого подключены к выходам преобразователя 2 частоты, а обмотка возбуждения - к выходам управляемого выпрямителя 3, датчики 4 и 5 соот- ветственно углового положения и скорости, установленные на валу синхронного двигателя 1, блок 6 датчиков фазных токов статора, датчик 7 тока возбуждения, последовательно соеди- ненные задатчик 8 интенсивности и регулятор 9 скорости, к второму входу которого подключен выход датчика 5 скорости, а выход регулятора скорости подключен к соответствующим входам трех блоков 10-12 нелинейности, при этом выходы первого и второго блоков 10 и 11 нелинейности подключены к первому и второму входам блока 13 преобразования координат, выходы которого соединены с входами блока 14 выделения заданного значения модуля вектора тока статора, а также с первым и вторым входаг блока 15 преобразования числа фаз. При этом выход блока 14 заданного значения модуля вектора ток статора соединен с третьим входом блока 15 преобразования числа фаз и с четвертым его входом через сумматор 16. Выходы блока 15 преобразова- ния числа фаз соединены с первыми тремя входами блока 17 регуляторов фазных токов, три вторых, входа которого подключены к выходам блока 6 датчиков
фазных токов статора, а выходы блока регуляторов фазных токов подключены к соответствующим управляющим входам преобразователя 2 частоты. Выход блока 14 выделения заданного значения модуля вектора тока статора через последовательно соединенные эталонную модель 18 и корректирующий регулятор 19 подключен к второму входу сумматора 16. Входы блока 20 выделения фактического значения модуля вектора тока статора подключены к соответствующим выходам блока 6 датчиков фазных токов, а его основной выход подключен к второму входу корректирующего регулятора 19. Выход третьего блока 12 нелинейности через регулятор 21 тока возбуждения подключен к входу управляемого выпрямителя 3, а второй вход регулятора 21 тока возбуждения подключен к выходу датчика 7 тока возбуждения,
В частотно-регулируемый синхронный электропривод введены два блока 22 и 23 деления и два блока 24 и 25 тригонометрических преобразований, каждый из которых выполнен с четырьмя входами и двумя выходами. Блок 15 преобразования числа фаз выполнен с двумя дополнительными выходами 26 и 27, подключенными соответственно к первому и второму входам первого блока 24 тригонометрических преобразований. Блок 20 выделения фактического значения модуля вектора тока статора выполнен с дополнительными выходами 28 и 29 составляющих тока статора, подключенными к входам делимых соответствующих блоков 22 и 23 деления, входы делителей которых подключены к основному выходу блока 20 выделения фактического значения модуля тока статора. При этом выходы блоков 22 и 23 деления подключены соответственно к третьему и четвертому входам первого блока 24 тригонометрических преобразований, соединенного выходами с первым и вторым входами второго блока 25 тригонометрических преобразований, по третьему и четвертому входам и выходам включенного между соответствующими выходами датчика 4 углового положения и входами для опорных функций блока 13 преобразования координат.
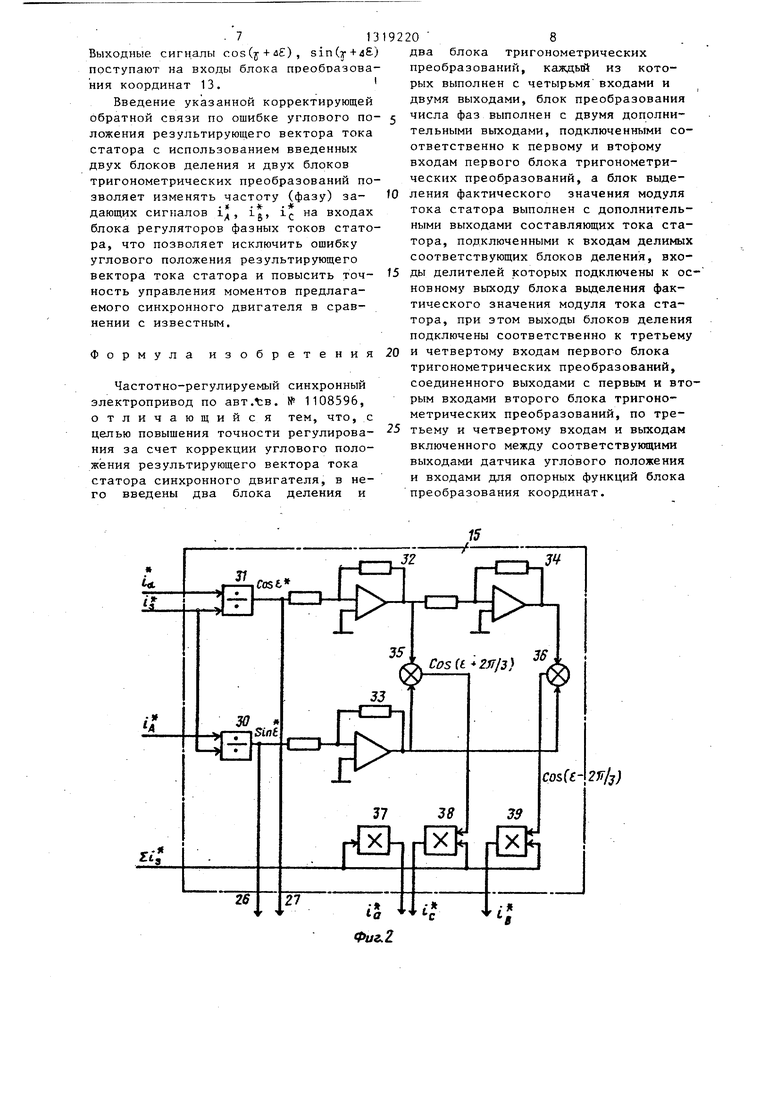
Блок 13 преобразования числа фаз содержит блоки 30 и 31 деления (фиг.2 масштабные усилители 32-34, сумматоры 35 и 36 и блоки 37-39 умножения. Выходы блоков 30 и 31 деления образуют соответственно дополнительные выходы 26 и 27 блока 15 преобразования числа фаз.
Блок 24 тригонометрических преобразований содержит блоки 40-43 умножения (фиг.З) и сумматоры 44 и 45. Первые входы.блоков 40, 43 и 41, 42 умножения попарно объединены и обра- зуют соответственно первый и второй входы блока 24 тригонометрических преобразований. Вторые входы блоков 40, 42 и 41, 43 умножения попарно объединены и образуют соответственно третий и четвертый входы блока тригонометрических преобразований, выходы которого образованы выходами сум- маторов 44 и 45. Входы сумматора 44 подключены к выходам блоков 40 и 41 умножения, а входы сумматора 45 - к выходам блоков 42 и 43 умножения.
Блок 25 тригонометрических преобразований содержит блоки 46-49 умножения (фиг,4), сумматоры 50 и 51. Первые входы блоков 46, 48 и 47, 49 умножения попарно объединены и обра- syfciT соответственно первый и второй входы блока 25 тригонометрических преобразований. Вторые входы блоков 46, 49 и 48, 47 умножения попарно объединены и образуют третий и четвертый входы блока 25 тригонометрических преобразований, выходы которого образованы выходами сумматоров 50 и 51. Входы сумматора 50 подключены к выходам блоков 46 и 47 умножения, а входы сумматора 51 - к выходам блоков 48 и 49 умножения.
Частотно-регулируемый синхронный электропривод работает следующим образом.
Сигнал задания скорости V поступает на вход задатчика 8 интенсивности и далее на вход регулятора 9 ско- рости, на другой вход которого поступает сигнал .обратной связи с выхода датчика 5 скорости. Сигнал с выхода регулятора 9 скорости поступает на вход блока 11 нелинейности, на выходе которого вырабатывается сигнал задания поперечной составляющей тока статора it. Кроме этого, сигнал с выхода регулятора 9 скорости поступает на вход блока 10 нелинейностей, на выходе которого вырабатывается сигнал задания продольной составляющей тока статора ij, Выходные сигналы i
и i блоков 10 и 11 нелинейности поступают на входы блока 13 преобразования координат, входы для гармонических функций которого подключены к выходу блока 25 тригонометрических преобразований.
В блоке 13 преобразования координат выполняются следующие преобразования:
i ()-i з1п(у+ле); i () +i cos (у+й);
где у - угол поворота ротора синхронного двигателя; ui- дополнительный угол поворота (фиг,5),
Сигналы 1, it поступают на входы блока 14 выделения заданного значения модуля вектора тока статора, где реализуется соотношение
i Н (ii)
(ip
Кроме того, сигналы i, i, i поступают на входы блока 15 преобразования числа фаз (фиг,2). На выходах блоков 30 и 31 деления получают соответственно нормированные гармонические функции
. .
1|
.l . 1/
.. г {
ту , Sin т; .
На выходах сумматоров 35 и 36 получают соответственно
cos(E +2 /3) -0, 0,866sin
cos() -0, 0,866sine
Сигнал i поступает на вход эталонной модели 18, представляющей собой динамическое звено второго порядка, параметры которого выбираются в соответствии с параметрами замкнутого контура регулирования результирующего вектора тока статора в предположении отсутствия ЭДС вращения, и настраиваемого на модульный оптимум. Выходной сигнал эталонной модели 18 поступает на вход корректирующего регулятора 19, на второй вход которого поступает сигнал ij, полученный в блоке 20 вьзделения фактического значения модуля вектора тока статора по соотношению
ei I л - 3 3
где 1, ig, 1-, - выходные сигналы блока датчиков 6 фазных токов статора
В электроприводе для исключения
Выходной сигнал ig корректирующе-,3 ошибки углового положения результиго регулятора 19 суммируется с сигналом i с помощью сумматора 16, на выходе которого получается сигнал . Таким образом в электроприводе осуществляется компенсационная самонаст- j ройка с эталонной моделью замкнутого контура регулирования результирующего ректора тока статора, что позволяет компенсировать возмущающее воздействие ЭДС вращения на контуры регулирования фазных токов статора и поддерживать заданную величину модуля результирующего вектора тока статора. Выходной сигнал Zi s сумматора 16
20
рующего вектора тока статора при высоких темпах изменения управляющего и возмущающего воздействий на систему автоматического регулирования скорости синхронного двигателя введена корректирующая обратная связь по ощибке углового положения результирующего вектора тока статора.
Нормированные сигналы гармонических функций sine, cose вычислены в блоке 15 преобразования числа фаз, с дополнительных выходов 26 и 27 которого поступают на первый и второй входы блока 24 тригонометрипоступает на вход блока 15 преобразо- 25 ческих преобразований, на третий и
вания числа фаз, в котором с помощью умножителей 37-39 (фиг.2) реализуются выражения
четвертый входы которого поступают нормированные сигналы гармонических функций sinЕ, cose с выходов блоков 22 и 23 деления, определяемые соот- 30 ношением
Zi5Cos ;
Zis( 27Г/3); Zi5( ).
Сигналы i , i
6
используются в
качестве заданий фазных токов на вхоах блока 17 регуляторов фазных тоов, на другие входы которого поступают сигналы iд, ij, i обратных связей с выходов блока датчиков фазных токов 6,
Выходные сигналы блока 17 регуляторов фазных токов поступают на соответствующие управляющие входы преобазователя 2 частоты.
Выходной сигнал регулятора 9 скорости поступает также на вход блока 12 нелинейности, выход которого определяет сигнал тока возбуждения i, который поступает на вход регулятора 21 тока возбуждения, на другой вход которого поступает сигнал обратной связи с выхода датчика 7 тока возбуждения. Выходной сигнал регулятора 21 тока возбуждения поступает на вход управляемого выпрямителя 3.
Отсутствие контуров регулирования составляющих тока статора синхронного двигателя по продольной и поперечным
а
13192206
осям и запаздывание, вносимое преобразователем частоты, обуславливает фазовый сдвиг между результирующими векторами заданного и фактического с токов статора (фиг.5), который определяет ошибку углового положения результирующего вектора фактического значения тока статора,
В электроприводе для исключения
е-,3 ошибки углового положения результи
рующего вектора тока статора при высоких темпах изменения управляющего и возмущающего воздействий на систему автоматического регулирования скорости синхронного двигателя введена корректирующая обратная связь по ощибке углового положения результирующего вектора тока статора.
Нормированные сигналы гармонических функций sine, cose вычислены в блоке 15 преобразования числа фаз, с дополнительных выходов 26 и 27 которого поступают на первый и второй входы блока 24 тригонометрических преобразований, на третий и
четвертый входы которого поступают нормированные сигналы гармонических функций sinЕ, cose с выходов блоков 22 и 23 деления, определяемые соот- 30 ношением
- 1/5. J
COS .
ic
is
где 1/, 1 А выходные сигналы с до- 35 полнительных выходов 28 и 29 блока 20 выделения фактического значения модуля вектора тока статора.
В блоке 24 тригонометрических преобразований (фиг.2) реализуются выра- 40 жения
(e -). sinie.sin( -E)sine cos :-cos sin.
45
50
55
Выходные сигналы со8л, блока тригонометрических преобразований поступают на первый и второй входы блока 25 тригонометрических преобразований, на третий и четвертый входы которого подаются опорные гармонические сигналы siny, cos с выходов датчика 4 положения.
В блоке тригонометрических преобразований 25 (фиг.З) реализуются выражения
cos(y-t-4)cos2rcosil -sinysini ; sin( jc+4)sinycos4 +cosysini.
7 13
Выходные сигналы cos(y + a), sin(y + 4) поступают на входы блока преобразования координат 13. Введение указанной корректирующей обратной связи по ошибке углового положения результирующего вектора тока статора с использованием введенных двух блоков деления и двух блоков тригонометрических преобразований позволяет изменять частоту (фазу) задающих сигналов 1д, ig, :L на входах
блока регуляторов фазных токов статора, что позволяет исключить ошибку углового положения результирующего вектора тока статора и повысить точность управления моментов предлагаемого синхронного двигателя в сравнении с известным.
Формула изобретения 20
г 25
Частотно-регулируемый синхронный электропривод по авт.в. № 1108596, отличающийся тем, что, с целью повышения точности регулирования за счет коррекции углового положения результирующего вектора тока статора синхронного двигателя, в него введены два блока деления и
20 8
два блока тригонометрических преобразований, каждый из которых выполнен с четырьмя входами и двумя выходами, блок преобразования числа фаз выполнен с двумя дополнительными выходами, подключенными соответственно к первому и BTofJOMy входам первого блока тригонометрических преобразований, а блок вьще- ления фактического значения модуля тока статора выполнен с дополнительными выходами составляющих тока статора, подключенными к входам делимых соответствующих блоков деления, входы делителей которых подключены к основному выходу блока выделения фактического значения модуля тока статора, при этом выходы блоков деления подключены соответственно к третьему и четвертому входам первого блока тригонометрических преобразований, соединенного выходами с первым и вторым входами второго блока тригонометрических преобразований, по тре- тьему и четвертому входам и выходам включенного между соответствующими выходами датчика углового положения и входами для опорных функций блока преобразования координат.
Cost
Cos(.)
Sin.(
Фиг.З
Фаг. Ч
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для частного управленияэлЕКТРОпРиВОдОМ пЕРЕМЕННОгО TOKA | 1978 |
|
SU794701A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2006 |
|
RU2320073C1 |
| Устройство для управления двигателем двойного питания | 2016 |
|
RU2625720C1 |
| Вентильный электропривод | 1984 |
|
SU1277341A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2011 |
|
RU2477562C1 |
| Частотно-регулируемый синхронный электропривод | 1983 |
|
SU1107242A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2006 |
|
RU2313895C1 |
| Частотнорегулируемый синхронный электропривод | 1983 |
|
SU1108596A1 |
| Электропривод с векторным управлением | 1985 |
|
SU1292153A1 |
| Устройство для управления электроприводом переменного тока | 1977 |
|
SU738090A1 |

Изобретение относится к электротехнике . Целью изобретения является повышение точности управления. Указанная цель достигается введением в частотно-регулируемый син хронный электропривод блоков 22 и 23 деления и блоков 24 и 25 тригонометрических преобразователей. Введение указанных блоков позволяет изменять частоту (фазу) фазных токов i, i, i на входах блока 17 регуляторов фазных токов, что обеспечивает исключение ошибки углового положения результирующего векторы тока статора синхронного двигателя 1. 5 ил. (Л 00 со to to ю
Редактор А.Сабо
Составитель А.Жилин
Техред В.Кадар Корректор В.Бутяга
Заказ 2526/53 Тираж 660Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Частотнорегулируемый синхронный электропривод | 1983 |
|
SU1108596A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
