лей образуют соответственно первый н второй дополнительные входы блока преобразования числа фаз, при этом входы блока выделения заданного значения модуля тока статора подключены к выходам блока преобразования координат а выход подключен к первому входу сумматора, к первому дополнительному входу блока преобразования числа фаз и к входу эталонного динамического звена второго порядка,
соединенного выходом с первым входом корректирующего регулятора, входы блока вьщеления фактического значения модуля тока статора подключены к выходам блока датчиков фазньк токов статора, а выход подключен к второму входу корректирующего регулятора, выход которого соединен с вторым входом сумматора, подключенного выходом к второму дополнительному входу блока преобразования числа фаз.
| название | год | авторы | номер документа |
|---|---|---|---|
| Частотно-регулируемый синхронный электропривод | 1986 |
|
SU1319220A2 |
| Частотно-регулируемый синхронный электропривод | 1983 |
|
SU1107242A1 |
| Электропривод | 1983 |
|
SU1167688A1 |
| Электропривод с асинхронной машиной с фазным ротором | 1975 |
|
SU610275A1 |
| ЭЛЕКТРОПРИВОД С СИНХРОННЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2092967C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2006 |
|
RU2320073C1 |
| Устройство для частного управленияэлЕКТРОпРиВОдОМ пЕРЕМЕННОгО TOKA | 1978 |
|
SU794701A1 |
| Способ управления двигателем двойного питания, выполненным на базе асинхронного двигателя с фазным ротором, и устройство для его осуществления | 1987 |
|
SU1610589A2 |
| Электропривод | 1987 |
|
SU1439729A1 |
| Электропривод с асинхронной машиной | 1971 |
|
SU548220A3 |
ЧАСТОТНО-РЕГУЛИРУЕМЫЙ СИНХРОННЫЙ ЭЛ1-ЖТРОПРИВОД, содержащий .синхронный двигатель с электромагнитным возбуждением, обмотка статора которого подключена к выходам преобразователя частоты с непосредственной связью, а обмотка возбуждения - к выходам управляемого выпрямителя, датчики углового положения и скорости, установленные на валу синхронного двигателя с электромагнитным возбуждением, блок датчиков фазных токов статора и датчик тока возб окдения, последовательно соединенные задатчик интенсивности и регулятор скорости, к выходу которого подключены три блока нелинейнос.тей, при этом выходы первого и второго блоков нелинейностей подключены к входам блока преобра-ювания координат, соединенного выходами с входами блока преобразования числа фаз, фазные выходы которого подключены к первым входам соответствующих фазных регуляторов тока, соединенных выходами с упранляющчми входами преобразователя частоты с непосредственной связью, выход третьего блока нелинейности подключен к первому входу регулятора тока возбуждения, выход которого соединен с управляющим входом управляемого выпрямителя, выходы блока датчиков фазных токов статора подключены к вторым входам соответствующих фазных регуляторов тока, выход датчика тока возбуждения подключен к второму входу регулятора тока возбуждения, выходы датчика углового положения подключены к входам для опорных функций блока преобразования координат, а выход датчика скорости - к второму входу регулятора скорости, отличающийся тем, что, с целью улучшения динамических характеристик за счет повышения быстродействия, О) в него введены блоки вьщеления заданС ного и фактического значений модуля тока статора, корректирующий регуД лятор, сумматор и эталонное динамическое звено второго порядка, составленное из последовательно включенных апериодического и интегрирующего звеньев, охваченных отрицательной обратной связью, а блок преобразования числа фаз выполнен со00 стоящим из формирователя нормироСП ванных трехфазных гармонических со О) функций и трех умножителей, выходы которых образуют выходы блока преобразования числа фаз, а первые входы подключены к выходам формирователя нормированных трехфазных гармонических функций, фазные входы которого образуют входы блока преобразования числа фаз, причем вход для нормирующего сигнала формирователя нормированных трехфазных гармонических функций и объединенные между собой вторые входы умножите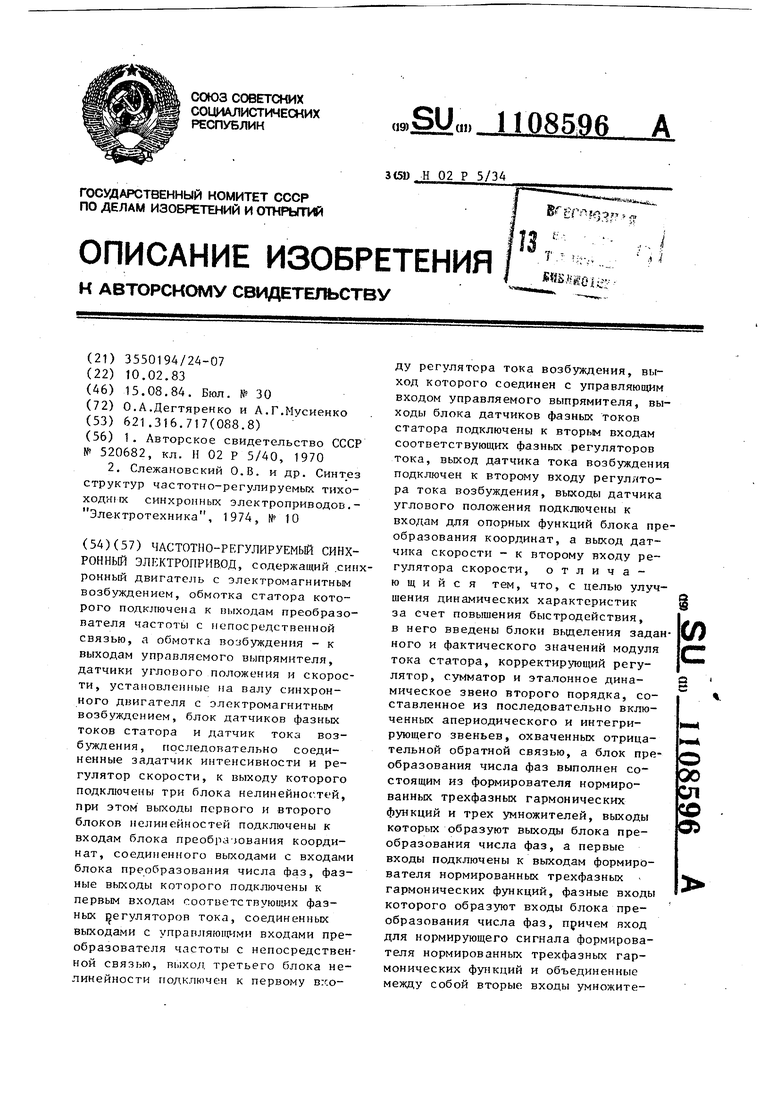
1
Изобретение относится к электротехнике, а именно к частотно-регулируемому электроприводу на базе синхронного двигателя с электромагнитньи возбуждением, и может быть использовано для регулирования скорости нагрузки.
Известен частотно-регулируемый синхронный электропривод, содержащий синхронный двигатель с электромагнитным возбуждением, обмотки статора которого подключены к выходам преобразователя частоты с непосредственной связью, а обмотка возбуждения - к выходам управляемого выпрямителя, датчики углового положения и скорости, установленные на валу синхронного двигателя, блок датчиков фазных токов статора и датчик тока возбуждения, последовательно соединенные задатчик интенсивности и регулятор скорости, выход которого связан с первыми входами регуляторов составляющих тока статора, соединенных выходами с входами блока прямого преобразования координат, выходы которого подключены к управляющим входам преобразователя частоты с непосредственной связью, при этом выходы блока датчиков фазных токов статора подключены к входам блока обратного преобразования координат, соединенного выходами с вторьми входами регуляторов составляющих токов ста7ора, выходы датчика углового положения подключены к входам.для гармонических функций блоков прямого и обратного преобразований координат.
а выходы датчика скорости - к второму входу регулятора скорости и к блоку компенсирования ЭДС вращения, связанного также входами с выходами датчика тока возбуждения и блока обратного преобразования координат и подключенного выходами к третьим входам регуляторов составляющих тока статора СП.
Недостатком известного частотнорегулируемого синхронного электропривода является конструктивная сложность, определяемая наличием блока обратного преобразования координат
и содержанием умножителей в блоке компенсирования ЭДС вращения.
Наиболее близким к изобретению является частотно-регулируемый синхРОННЫЙ электропривод, содержащий синхронный двигатель с электромагнитным возбуждением, обмотки статора которого подключены к выходам преобразователя частоты с непосредственной связью, а обмотка возбуждения - к выходам управляемого выпрямителя, датчики УГЛОВОГО положения и скорости, установленные на валу синхронного двигателя, блок датчиков фазных токов статора и датчик тока возбуждения, последовательно соединенные задатчик интенсивности и регулятор скорости, к выходу которого подключены три блока нелинейностей, при этом выходы первого и второго блоков нелинейностей подключены к входам блока преобразования координат, соединенного выходами с входами блока преобразоваПИЯ числа фаз, фазные вькоды которого подключены к первым входам соответствующих фазных регуляторов тока, соединенных выходами с управляющими входами преобразователя частоты с непосредственной связью, выход третьего блока нелинейности подключен к первому входу регулятора тока возбуждения, выход которого соединен с управляющим входом управляемого выпрямителя, выходы блока датчиков фазных токов подключены ко вторым входам соответствующих фазных регуляторов тока, выход датчика тока возбуждения подключен ко второму входу регулятора тока возбуждения, выходы датчика углового положения подключены к входам для опорных функций блока преобразования координат, а выход датчика скорости - ко второму входу регулятора скорости С 21.
Однако известный частотно-регулируемый синхронный электропривод характеризуется недостаточно высокими динамическими характеристиками, в частности невысоким качеством регулирования момента и скорости и невысокое быстродействие.
Целью изобретения является улучщение динамических характеристик частотно-регулируемого синхронного электропривода за счет повышен11Я быстродействия.
Указанная цель достигается тем, что в частотно-регулируемый синхронный электропривод, содержащий синхронный двигатель с электромагнитным возбуждением, обмотка статора которого подключена к выходам преобразователя частоты с непосредственной связью, а обмотка возбуждения - к выходам управляемого выпрямителя, датчики углового положения и скорости, установленные на валу синхронного двигателя с электромагнитным возбуждением, блок датчиков фазных токов статора и датчик возбуждения, последовательно соединенные задатчик интенсивности и регулятор скорости, к выходу которого подключены три блока нелинейностей, при этом выходы первого и второго блоков нелинейностей подключены к входам блока преобразования координат, соединенного выходами с входами блока преобразования числа фаз, фазные выходы которого подключены к первым входам соответствующих фазных регуляторов тока, соединенных вькодами с управляющими входами преобразователя частоты с непосредственной связью, иыход третьего блока нелинейности подклю.чен к первому входу регулятора тока возбуждения, выход которого соединен с управляющим входом управляеMorg выпрямителя, выходы блока датчиков фазных токов статора подключены ко вторым входам соответствующих фазных регуляторов тока, выход датчика тока возбуждения подключен ко второму входу регулятора тока возбуждения, выходы датчика углового положения подключены к входам Для опорных функций блока преобразования координат, а выход датчика скорости - по второму входу регулятора скорости, введены блоки выделе- , ния заданного и фактического значений модуля тока статора, корректирующий регулятор, сумматор и эталонное динамическое звено второго порядка, составленное из последовательно включенных апериодического и интегрирующего звеньеВу охвачёниБ|х отрицательной обратной связью, а блок преобразования числа фаз выполнен состоящим из формирователя нормированных трехфазных гармонических
0 функций и трех умножителей, выходы которых образуют выходы блока преобразования числа фаз, а первые входы подключены к выходам формирователя нормированньк трехфазных гармонических функций, фазные входы которого образуют входы блока преобразования числа фаз, причем вход для нормирующего сигнала формирователя нормированных трехфазных гармони0ческих функций и объединенные между собой вторые входы умножителей образуют соответственно первый и второй дополнительные входы блока преобразования числа фаз, при этом
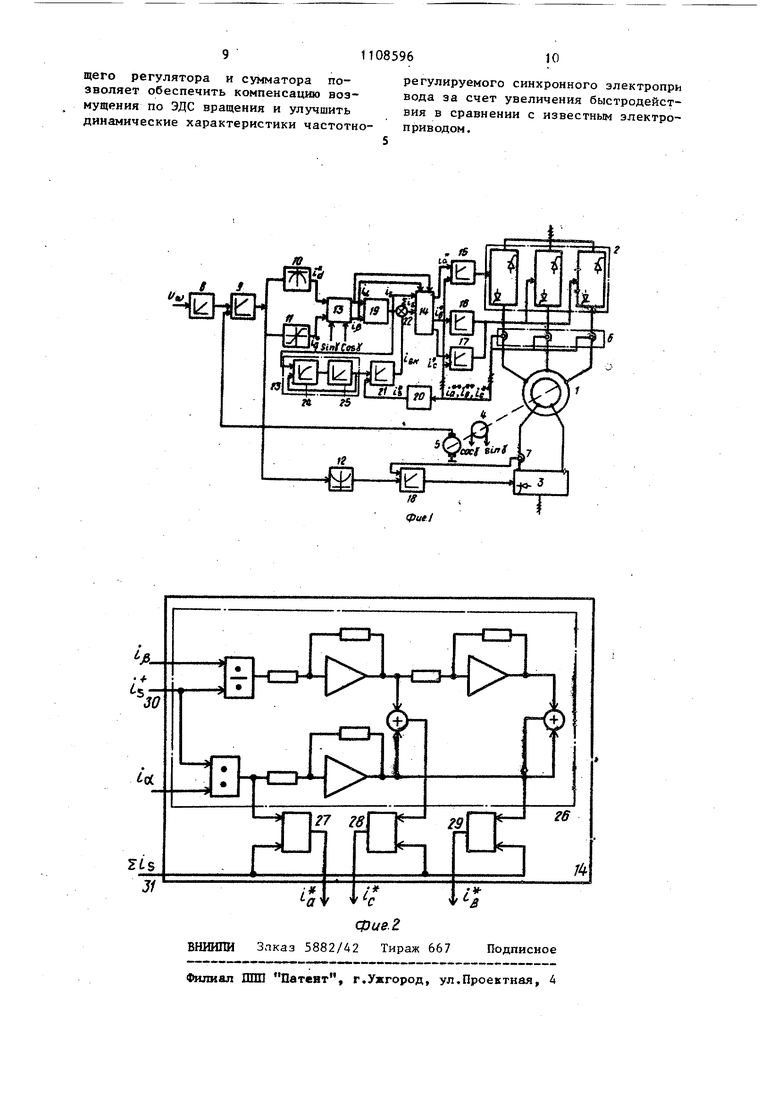
5 входы блока выделения заданного значения модуля тока статора подключены к выходам блока преобразования координат, а выход подключен к первому входу сумматора, к первому до0полнительному входу блока преобразования числа фаз и ко входу эталонного динамического звена второго порядка, соединенного выходом с первым входом корректирующего регуля5тора, входы блока выделения фактического значения модуля тока статора подключены к выходам блока датчиков фазных токов статора, а выход подключей ко второму входу корректирую Цего регулятора, выход которого соединен со вторым входом сумматора, подключенного выходом ко второму до полнительному входу блока преобразо ния числа фаз. На фиг. 1 представленч функциональная схема частотно-регулируемог синхронного электропривода; на фиг. схема блока преобразования числа фаз. Частотно-регулируемый синхронный электропривод содержит синхронный двигатель с электромагнитным возбуж дением 1 (фиг.1), обмотки статора которого подключены к выходам преобразователя частоты с непосредственной связью 2, а обмотка возбуждения - к выходам-управляемого выпрямителя 3, датчик углового положе ния 4 и датчик скорости 5, установленные на валу синхронного двигателя с электромагнитным возбуждением блок датчиков 6 фазных токов стато и датчик тока возбуждения 7, послед вательно соединенные задатчик интен сивности 8 и регулятор скорости 9, выходу которого подключены три блок нелинейностей 10-12, При этом выходы первого и второг блоков нелинейностей 10, 11 подключены к входам блока преобразования координат 13, соединенного выходами с входами блока преобразования числа фаз 14, фазные выходы которого подключены к первым входом соответствующих фазных регуляторов тока 15-17, соединенных выходами с управляющими входами преобразователя час тот с непосредственной связью 2, выход третьего блока нелинейности 12 подключен к первому входу регулятора тока возбуждения 18, выход ко торого соединен с управляющим входом управляемого выпрямителя 3, выходы блока датчиков 6 фазных токов статора подключены ко вторым входам соответственно фазных регуляторов тока 15-17, выход датчика тока возбуждения 7 подключен ко второму входу регулятора тока возбуждения 18, выходы датчика углового положения 4подключены к входам для опорных функций блока преобразования координат 13, а выход датчика скорости 5- ко второму входу регулятора скорости 9. В частотно-регулир уемый синхронный электропривод введены блок 19 выделения заданного значения модуля тока статора, блок 20 выделения фактического значения модуля тока статора, корректирующий регулятор 21, сумматор 22 и эталонное динамическое звено второго порядка 23, составленное из последовательно включенных апериодического звена 24 и интегрирующего звена 25, охваченных отрицательной обратной связью. Блок преобразования числа фаз 14 выполнен состоящим из формирователя нормированных трехфазных гармонических функций 26 и трех умножителей 27-29, выходы которых образуют выходы блока преобразования числа фаз 14, а первые входы подключены к выходам формирователя нормированных трехфазных гармонических функций 26, фазные входы которого образуют входы блока преобразования типа фаз 14, причем вход для нормирующего сигнала формирователя нормированных трехфазных гармонических функций 26 и объединенные между собой вторые входы умножителей 27, 28, 29 образуют соответственно первый и второй дополнительные входы 30,31 блока преобразования числа фаз 14, При этом входы блока 19 выделения заданного значения модуля тока статора подключены к выходам блока преобразования координат 13, а выход подключен к первому входу сумматора 22, к первому дополнительному входу 30 блока преобразования числа фаз 14 и ко входу эталонного динамического звена .второго порядка 23, соединенного выходом с первым входом корректирующего регулятора 21, входы блока 20 выделения фактического значения модуля тока статора подключены к выходам блока датчиков 6 фазных токов статора, а выход подключен ко второму входу корректирующего регулятора 21, выход которого соединен со вторым входом сумматора 22, подключенного выходом ко второму.дополнительному входу 31 блока преобразования числа фаз 14. Частотно-регулируемый синхронный электропривод работает следующим образом. Сигнал задания скорости U(j) поступает на вход задатчика интенсивности 8 и далее - на вход регулятора
скорости 9, на другой вход которого поступает сигнал обратной связи с датчика скорости.5. Сигнал с выхода регулятора скорости 4 поступает на вход блока нелинейности 11, на выход которого вырабатывается сигнал задания поперечного тока статора i . Кроме этого, сигнал с выхода регулятора скорости 9 поступает на вход блока нелинейности 10, на выходе которого вырабатывается сигнал задания продольного тока статора 1 . Выходные сигналы i и IQ блоков нелинейности 10, 11 поступают на входы блока преобразования координат 13, входы для опорных функций которого подключены к выходам- датчика угловог положения 4. .
В блоке преобразования координат 13 выполняются следующие преобразования
ioL i sin у,, i - i cosj
где - угол поворота вала синхронного двигателя.
Сигналы t, IQ поступают на входы блока 19 выделения заданного значения модуля тока статора, где реализуется соотношение
1« - /тг -1 г S V р
Кроме того, сигналы г.,id поступа-, ют на входы блока преобразования числа фаз 14, а сигнал г поступает на первый дополнительный вход 30 блока преобразования числа фаз (на вход для нормирующего сигнала формирователя нормированных трехфазных гармонических 1УНКЦИЙ 26 на фиг. 2). При этом выполняются соотношения
cos ос ioL/is . sinoi ,
cos (о1.-2д-,3) - -0,5 COSOC+0,866 sinot.
(си-2л/3) -0,5 cosoL.-0,866 sinoi.
cos
Сигнал l| поступает также на вход эталонного динамического звена второго порядка 23, выходом подключенного к корректирующему регулятору 21, на второй вход которого поступает сигнал t , полученный и блоке 20 выделения фактического значе- . кия модуля тока статора по соотношению
|(
где In ,i , - выходные сигналы блока датчиков 6 разных токов статора.
ч
Выходной сигнал i корректирующего регулятора 21 суммируется с сигналом i с помощью сумматора 22, на выходе которого получается
сигнал,
поступающий на второй
дрполнительный вход 31 блока преобразования числа фаз. С помощью умножителей 27,28,29 реализуются выражения:
iq 2: 15, cos ,
i S 5 cos(oL- 23Г/3), i 2 is cos(oL+ 23Г/3).
Сигналы г i используются в качестве задавим фазных токов на
входах фазных регуляторов токов 15-17.
Выходной сигнал регулятора скорости 9 поступает также на вход блока нелинейности 12, выход которого
определяет сигнал задания для регулятора тока возбуждения 18.
В электроприводе осуществлена компенсация возмущающего воздействия ЭДС вращения на контуры регулирования
составляющих фазных токов при помощи компенсационной самонастройки с эталонным динамическим звеном второго порядка, параметры которого выбираются в соответствии с параметрами
замкнутого контура регулирования результирующего вектора тока статора в предположении отсутствия ЭДС вращения и настраиваются, .например, на модульный оптимум.
При этом сигнал i, соответствующий результирующему вектору тока статора, сравнивается на входе корректирующего регулятора 21 с выходным сигналом эталонного динамического звена второго порядка 23, а результат сравнения используется для коррекции заданий на фазные токи статора.
Введение указанной корректирующей связи с использованием введенных блоков вьщелений заданного и фактического значений модуля тока статоэталонного динамического звера,
на второго порядка, корректирую91108596
щего регулятора и сумматора позволяет обеспечить компенсацию возмущения по ЭДС вращения и улучшить
динамические характеристики частотно- приводом,
регулируемого синхронного электропри вода за счет увеличения быстродействия в сравнении с известным электро
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Электропривод с синхронным двигателем | 1970 |
|
SU520682A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Слежановский О.В, и др | |||
| Синтез структур частотно-регулируемых тнхоходнмх синхронных электроприводов | |||
| Электротехника, 1974, № 10 | |||
