к входам блока преобразования координат, выходы которого соединены с первыми входами соответственно второго и третьего блоков умножения, второй вход второго блока умножения подключен к выходу инвертора, вход
которого объединен с вторым входом третьего блока умножения и подключен к выходу сумматора, а выходы второго и третьего блоков умножения под-. ключены к входам блока преобразования числа фаз.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД С СИНХРОННЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2092967C1 |
| Частотно-регулируемый синхронный электропривод | 1986 |
|
SU1319220A2 |
| Электропривод с синхронным двигателем | 1975 |
|
SU809460A2 |
| Электропривод с асинхронной машиной с фазным ротором | 1975 |
|
SU610275A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 1995 |
|
RU2101846C1 |
| Вентильный электропривод | 1987 |
|
SU1439727A1 |
| СПОСОБ УПРАВЛЕНИЯ ТЯГОВЫМ СИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ, УСТРОЙСТВО ДЛЯ РЕАЛИЗАЦИИ ЭТОГО СПОСОБА И БЛОК ФОРМИРОВАНИЯ ЗАДАННЫХ ЗНАЧЕНИЙ ТОКА ВОЗБУЖДЕНИЯ И СОСТАВЛЯЮЩИХ ВЕКТОРА ТОКА СТАТОРА ПО ПРОДОЛЬНОЙ И ПОПЕРЕЧНОЙ ОСЯМ | 2003 |
|
RU2250552C2 |
| Электропривод переменного тока | 1984 |
|
SU1515322A1 |
| Электропривод | 1985 |
|
SU1277346A1 |
| Вентильный электропривод | 1984 |
|
SU1205246A1 |
ЧАСТОТНО-РЕГУЛИРУЕМЫЙ СИНХРОННЬЙ ЭЛЕКТРОПРИВОД, содержащий синхронный двигатель с электромагнитным возбуждением, обмотки статора которого подключены к выходам преобразователя частоты с непосредственной связью, а обмотка возбуждения - к выходам управляемого вьспрямнтеля, датчики углового положения и скорости, установленные на валу синхронного двигателя с электромагнитным возбуждением, блок датчиков фазных токов статора и датчик тока возбуждения, последовательно среди-, ненные задатчик интенсивности и регулятор скорости, к выходу которого подключены три блока нелинейностей, при этом выходы первого и второго блоков нелинейностей связаны с входами блока преобразования числа фаз, фазные выходы которого подключены к первым входам соответствующих фязиых регуляторов тока, соединенных выходами с управляющими входами преобразователя частоты с непосредственной связью, выход третьего блока нелинейности подключен к первому входу регулятора тока возбуждения. выход которого соединен с управляющим входом управляемого выпрямителя, выходы блока датчиков фазных токов статора подключены к вторым входам соответствующих фазных регуляторов тока, выход датчика тока возбуждения подключен к второму входу регулятора тока возбуждения, выходы датчика углового положения подключены к входам для опорных функций блока преобразования координат, а выход датчика скорости - к второму входу регулятора скорости, отличающий с .я тем, что, с целью лучшения динамических характеристик за счет повышения быстродействия, введены блок выделения заданного зна(Д чения модуля тока статора, вычислитель модуля потокосцепления ста-с тора, два блока деления, инвертор, сумматор и три блока умножения, входы первого из которых подключены к выходам датчика скорости и вычислителя модуля потокосцепления статора, а выход - к первому входу 4j сумматора, второй вход которого объю единен с входами делителей блоков деления и подключен к выходу блока ю выделения заданного значения модуля тока статора, при этом выход первого блока нелинейности подключен к объединенным между собой первому входу блока вьщеления заданного значения модуля тока статора и входу делимого первого блока деления, выход второго блока нелинейности подключен к объединенным между собой второму входу блока выделения заданного значения модуля тока статора и входу делимого второго блока деления, выходы блоков деления подключены
1
Изобретение относится к электротехнике, а именно к частотно-регулируемому электроприводу на базе синхронного двигателя с электромагнитным возбуждением, и может быть испол зовано для регулирования скорости . нагрузки.
Известен частотно-регулируемый синхронный электропривод, содерзсащий синхронный двигатель с электромагнитным возбуждением, обмотки статора которого подключены к выходам преобразователя частоты С непосредственной связью, а обмотка возбуждения - к выходам управляемого выпрямителя, датчики углового положения и скорости, установленные на валу синхронного двигателя, блок датчиков фазных токов статора и датчик тока возбуждения, последовательно соединенные задатчик интенсивности и регулятор скорости, выход которого связан с первыми входами регуляторов составляющих тока статора, соединенных выходами с входами блока прямого преобразования координат , выходы которого подключен к управляющим входам преобразователя частоты с непосредственной связью, при этом выходы блока датчиков фазных токов статора подключены к входам блока обратного преобразования координат, соединенного выходами с вторыми входами регуляторов составляющих гоков статора, выходы датчика углового положения подключены к входам для гармонических функций блоков прямого и обратного преобразований координат, а выходы датчика скорости - к второму входу регулятора скорости и бдоку компенсирования ЭДС вращения, связанного также входами с выходами датчика тока возбуждения и блока обратного преобразования координат и подключенного выходами к третьим входам регуляторов составляющих тока статора 1.
Недостатком этого частотно-регулируемого синхронного электропривода является конструктивная сложность, определяемая наличием блока обратного преобразования координат и сложным выполнением блока компенсирования ЭДС вращения.
Наиболее близким к изобретению является частотно-регулируемый синхронный электропривод, содержащий синхронный двигатель с электромагнитным возбуждением, обмотки статора которого подключены к выходам преобразователя частоты с непосредственной связью, а .обмотка возбуждения - к выходам управляемого выпрямителя, датчики углового положения и скорости, установленные на валу синхронного двигателя с электромагнитным возбуждением, блок датчиков фазных токов статора и датчик тока возбуждения, последовательно соединенные задатчик интеясивности и регулятор скорости, к выходу которого подключены три блока нелинейностей, при этом выходы первого и второго блоков нелинейностей связаны с входами блока преобразования координат и блока преобразования числа фаз, фазные выходы которого подключены к первым входам соответсвующих фазных регуляторов тока, соединенных выходами с управляющими входами преобразователя частоты с непосредственной связью, выход третьего блока нелинейности подключен к первому входу регулятора тока возбуждения, выход которого соединен с управляющим входом управляемого вьшрямителя, выходы блока датчиков фазных токов статора подключены к вторым входам соответствующих
фазных регуляторов тока, выход датчика тока возбуждения подключен к второму входу регулятора тока возбуждения, выходы датчика углового положения подключены к входам для опорных функций блока преобразования координат, а выход датчика скорости - к второму входу регулятора скорости С2 .
Однако для известного частотнор.егулируемого синхронного электропривода характерны недостаточно выские динамические характеристики, определяемые невысоким быстродействием из-за отсутствия компенсирующей связи по ЭДС вращения.
Целью изобретения является улучшение динамических характеристик частотно-регулируемого синхронного электропривода за счет повышения быстродействия путем введения компесирующей связи по ЭДС вращения.
Указанная цель достигается тем, что в частотно-регулируемый синхронный электропривод, содержащий синхронный двигатель с электромагнитным возбуждением, обмотки статора которого подключены к выходам преобразователя частоты с непосредственной связью, а обмотка возбуждения к выходам управляемого выпрямителя, датчики углового положения и скорости, установленные на валу синхронного двигателя с электромагнитным возбуждением, блок датчиков фазных токов статора и датчик тока возбуждения, последовательно соединенные задатчик интенсивности и регулятор скорости, к выходу которого подключены три блока нелинейностей, при этом выходы nepBoio и второго блоков нелинейностей связаны с входами блока преобразования координат и блока преобразования числа фаз, фазные выходы которого подключены к первым входам соответствукшщх фазных регуляторов тока, соединенных выходами с управляющими входами преобразователя частоты с непосредственной связью, выход третьего блока нелинейности подключен к первому входу регулятора тока возбуждения, выход которого соединен с управляющим входом управляемого вьшрямителя, выходы блока датчиков фазных токов статора подключены к вторым входам соответствующих фазных регуляторов тока, выход датчика тока возбуждения подключен к второму входу регулятора тока возбуждения, выходы датчика углового положения подключены к входам для опорных функций блока преобргхзования координат, а выход датчика скорости-- к второму входу регулятора скорости, введены блок выделения заданного значения модуля тока статора, вь1числитель модуля потокосцепления статора, два блока деления, инвертор, сумматор и три блока умножения, входы первого из которых подключены к выходам датчика скорости и вычислителя модуля потокосцепления статора, а выход - к первому входу сумматора, второй вход которого объединен с входами делителей блоков деления и подключен к выходу блока вьщеления заданного значения модуля тока статора, при этом выход первого блока нелинейности подключен к объединенным между собой первому входу блока вьделения заданного значения модуля тока статора и входу делимого первого блока деления, выход второго блока нелинейности подключе-н к объединенньм между собой второму входу блока выделения заданного значения модуля тока статора и входу делимого второго блока деления, выходы блоков деления подключены к входам блока преобразования координат, вьтход. которого соединены с первыми входами соответственно второго и третьего блоков умножения, второй вход второго блока умножения подключен к выходу инвертора, вход которохо объобъединен с вторым входом тертьего блока умножения и подключен к выходу сумматора, а выходы второго и третьего блоков умножения под1шючены к входам блока преобразования числа фаз.
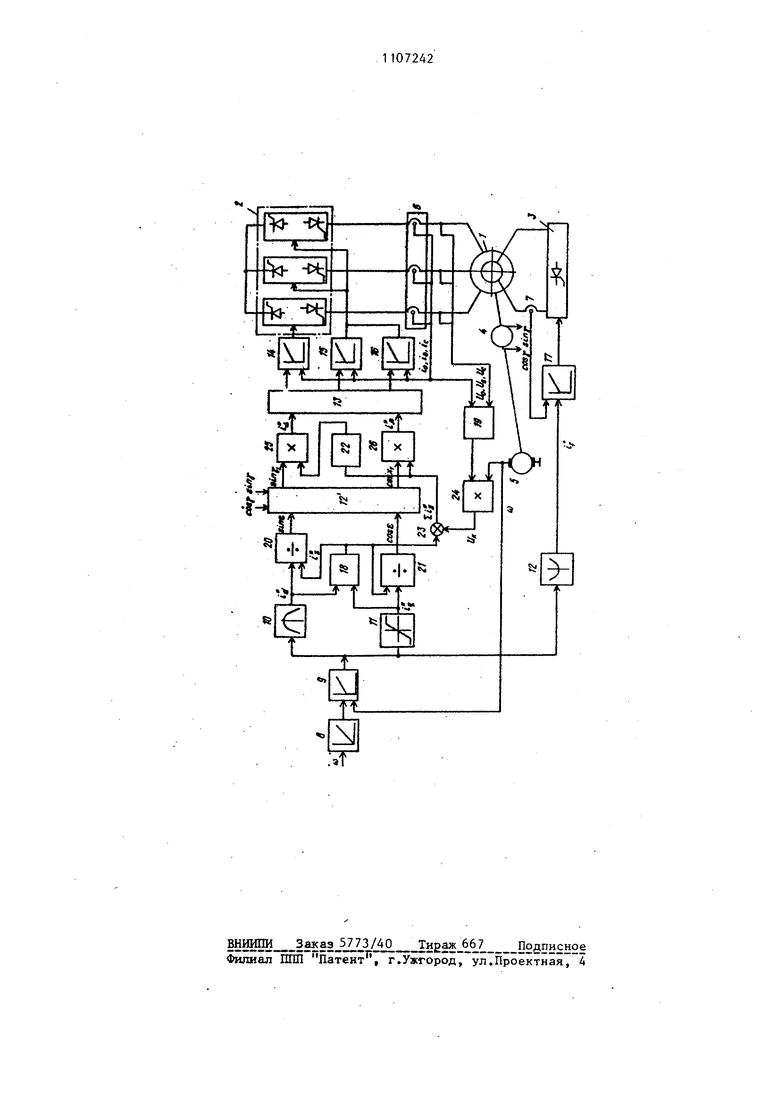
На чертеже представлена структурная схема частотно-регулируемого синхронного электропривода.
Устройство содержит синхронный двигатель 1 с электромагнитным возбуждением, обмотки статора которого подключены к выходам преобразователя 2 частоты с непосредственной связью, а обмотка возбуждения - к выходам управляемого выпрямителя 3, датчик 4 углового положения и датчик 5 скорости, установленные на валу синхронного двигателя 1 с электромагнитным возбуждением, блок 6 датчиков фазных токов статора, дат. . - ь . - . чнк 7 тока возбуждения,-последовательно соединенные задатчик 8 интен сивности и регулятор 9 скорости, к выходу которого подключены три блока 10-12 нелинейностей,. при этом выходы первого 10 и второго 11 блоков нелинейностей связаны с входами блока 12 преобразования координат и блока 13 преобразгвания числа фаз, фазные выходы которого подключены к первым входам соответствующих фазЕ-1ых регуляторов 14-16 тока, соединённых выходами с управляющими входами преобразователя 2 частоты с непосредственной связью, выход третьего блока 12 нелинейности подкль чен. к первому входу регутора 17 тока возбуждения, выход которого соединен с управляющим вхо дом управляемого выпрямителя 3, выходы блока 6 датчиков фазных токов статора подк.пючены к вторым вхо дам соответствующих фазных регулято ров тока 14-16, выход датчика 7 тока Возбулсдения подключен к второму входу регулятора 17 тока возбуждения, выходы датчика 4 углового поло жения - к входам для опорHbix функций блока 12 преобразования координат,, а выход датчика 5 скорости к BTOpot-iy входу регулятора 9 скорости. В частотно-регулируемый синхронный электропривод введены блок 18 вьиеления заданного значения модуля тока статора, вычислитель 19 модуля потокосцепления статора, два блока 20 и 21 деления, инвертор 22, сумматор 23 и три блока 24-26 умножения. Входы первого бл.ока 24 умножения подключены к выходам Датчика 5 скорости и вычислителя 19 модуля потокосцепления статора, а выход к первому входу сумматора.23, второй вход которого объединен с входа ми делителей блоков 20 и 21 деления и подключен к выходу блока 18 вьщеления заданного значения модуля тока статора, при, этом выход первого блока 10 нелинейности подключен к объединенным между собой первому входу блока 18 выделения заданного значения модуля тока статора и входу делимого первого блока 20 деления, второго блока 11 нелиней но сти подкл юч е н ко бъедине иным между собой второму входу блока 18 вы.деления заданного значения модуля тока статора и входу делимого второ 2 . . 6 , го блока 21 деления, выходы блоков 20 и 21 деления подключены к входам блока 12 преобразования координат, выходы которого соединены с первыми входами соответственно второго 25 и третьего. 26 блоков умножения, второй вход второго блока 25 умножения подключен к выходу инвертора 22, вход которого объединен с вторым входом третьего блока 26 умножения и подключен к выходу сумматора 23, а выходы второго 25 и третьего 26 блоков-умножения подключены к входам блока 13 преобразования числа фаз. Частотно-регулируемый синхронный электропривод работает следующим образом. Сигнал зад.ания скорости U.,. поступает на вход задатчика 8 интенсивности и далее на вход регулятора 9 скорости, на другой вход которого поступает сиг-нал обратной связи с датчика 5 .скорости. Сигнал с выхода регулятора 9 скорости, являющийся заданием момента М,, поступает на.вход блока 11 нелинейности, на выходе которого формируется сигнал задания Ь:оперечной составляющей тока статора 1„. Кроме того, сигнал с выхода регулятора 9 скорости пос10 нелинейноетупает на вход блока ти, на выходе которого формируется, сигнал задания продольного тока статора ij. В блоке 18 вьщеления заданного значения модуля тока статора производится определение заданного значения модуля тока статора по сигналам задания поперечной и продольной составляющих тока статора по выражению -1Щ) С помощью блоков 20 и 21 деления определяют функции: /. co.s /. )t s in - которые поступают на входы блока 12 преобразования координат. В блоке 12 преобразования координат выполняются следующие преобразования: . sin -у sin j -t- sin cos + + cos у sinE у cos E f cos у -t- E cos - sin f sin E где sin 2f cos у - опорные функции, поступакщие с выходов датчика 4 углового положения. Заданное значение модуля тока статора i поступает также на один из входов сумматора 23, на другой вход которого поступает выходной сигнал блока 24 умножения, представ ляющий собой сигнал, состветствующий ЭДС вращения и формируемый по выражению Е, - Vs , (4) где UJ- выходной сигнал датчика 5 скорости; Vg модуль потокосцепления стаМодуль потокосцепления статора 1 -формируется с помощью вычислителя 19 модуля потокосцепления статора по следующим выражениям: Е, ид- Е0 UB - ЕС Uc - l На выходе сумматора 23 формирует ся сумма: 2-i; - UK . . (6) где Uv V w/( - сигнал компенса ции ЭДС вращени К - коэффициент усиления пре образователя 2 частоты с непосредствейной связью Получеиньй по формуле (6) сигнал поступает на вход блока 26 умножения и через инвертор 22 на вход бло ка 25 умножения. С помощью блоков умножения реали зуются выражения: - -Slig sin -у 1 о. s . Т-1 где ij, ifi представляют собой составляющие тока статора в неподвижны осях статора oL , j , преобразованные из составляющих тока статора d Я/ осях ротора d, g. Преобразование составляющих i/, in, в трехфазную систему сигналов осуществляется с помощью блока 13 преобразования числа фаз, выходные сигналы которого поступают на входы регуляторов 14-16 фазных токов в качестве сигналов заданий фазных токов. Сигналы обратной связи по фазным токам поступают на другие входы регуляторов фазных токов статоров с выходов блока 6 датчиков фазных токов статора. Выходные сигналы регуляторов 14-16 фазных токов статора являются управляющими для преобразователя 2 частоты с непосредственной связью. Выходной сигнал с датчика 9 скорости поступает также на блок 12 нелинейности, на выходе которого формируется задание i на ток возбуждения, поступающее на один из входов регулятора 17 тока возбуждения на вход обратной связи которого поступает сигнал с-выхода датчика 7 тока возбуждения. На выходе регулятора 17 тока возбуждения формируется сигнал для управления управляемого выпрямителя 3. Таким образом, введение в частотно-регулируемый синхронный электропривод блока выделения заданного значения модуля тока статора, вычислителя модуля потокосцепления статора, двух блоков деления, инвертора, сумматора и трех блоков умно- . жения позволяет обеспечить в контурах регулирования фазных токов статора дополнительную компенсационную связь по ЭДС вращения синхронного двигателя, что приводит к улучшению динамических характеристик за счет повышения быстродействия в сравнении с известным электроприводом.
| Г | |||
| Электропривод с синхронным двигателем | 1970 |
|
SU520682A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Слежановский О.Б | |||
| и др | |||
| Синтез структур частотно-регулируемых тихоходных синхронных электроприводов | |||
| - Электротехника, 1974, № 10 | |||
| , . | |||
