113201372
относится к средствам ли 15 и 16, где напряжение U, постоИзобретениеавтоматизации и средствам регулируемого электропривода механизмов, с гибким тяговым органом, преимущественно ленточных конвейеров используе- г мых на предприятиях горно-добывающей, строительной и других отраслей.
Целью изобретения является улучшение пусковых свойств конвейера.
На фиг, 1 изображена функциональ- о пая схема предлагаемого устройства; на фиг. 2 - принципиальная схема устройства.
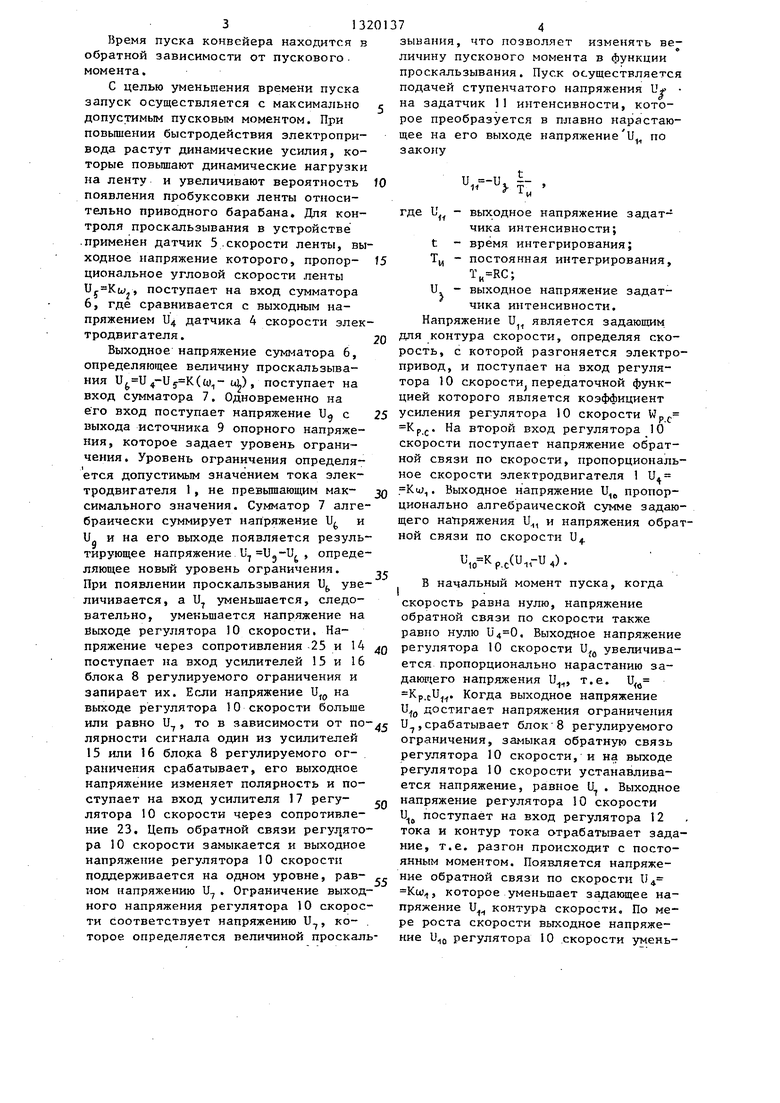
Устройство для управления электроприводом конвейера состоит из элек- f5 тродвигателя 1, конвейера 2, тирис- торного преобразователя 3, датчика 4 скорости электродвигателя, датчика 5 скорости ленты, сумматоров 6,7, блока 8 ограничения, источника 9 опорного Напряжения, регулятора 10 скорости, задатчика 11 интенсивное- ти, регулятора 12 тока, датчика 13 тока,
В силовую цепь приводного электродвигателя 1 конвейера 2 включен регулируемый тиристорный преобразователь 3, к входу которого подключен „выход регулятора 12 тока.
янно сравнивается с напряжением U, Если напряжение U по величине достигает напряжения U-, , то в зависимости от его полярности усилители 15 и 16 открываются и- сопротивление 23 замыкает обратную связь регулятора 10 скорости, поддерживая его выходное напряжение U на одном уровне, равном по величине U. Напряжение ограничения U-, при отсутствии проскальзывания задается источником опорного напряжения (и,и„). При проскальзывании напряжение ограничения и, задаваемое источником 9 опорного напряжения, уменьшается на величину, пропорциональную проскальзыванию и Ug-K(u)u)p . В этом случае выходное напряжение U регулят.о20
ра 10 скорости ограничивается на более низком уровне и поддерживается на этом уровне до тех пор, пока не исчезнет проскальзывание.
Устройство работает следующим об- 25 разом, I
На вход усилителя 17 регулятора
10 скорости через сопротивление 18 поступает линейно нарастающее напря- жение и, которое формируется задат10 скорости через сопротивление 18 поступает линейно нарастающее напря- жение и, которое формируется задат. К первому входу регулятора 12 то- ЗО чиком 1 интенсивности. Одновремен- ка подключен выход регулятора 10 ско- р сопротивление 19 на усили- рости, к второму входу - датчик 13 тока.К первому входу регулятора 10 скорости подключен выход задатчика 11 интель 17 поступает выходное напряжение датчика А скорости электродвигателя, величина которого пропорцио- тенсивности,к второму входу регулятора 35 нальна частоте вращения электродви- 10 скорости подключен выход датчика 4 скорости электродвигателя, к третьему входу - выход блока 8 регулируемого ограничения, К первому входу блока 8 регулируемого ограничения д жениё U , которое является задающим подключен выход регулятора 10 скорое- токового контура. Напряжение U ти, к второму - вьпсод сумматора 7, к первому входу которого подключен источник 9 опорного напряжения 9 к второму подключен выход сумматора 6 К первому входу сумматора 6 подключен вьпсод датчика 4 скорости электгателя ,,, образуя отрицательную обратную связь по скорости. Напряжения и и и складываются усилителем 17 и на его выходе появляется напря oпоступает через сопротивление 20 на
усилитель 21 регулятора 12 тока, на которьй через сопротивление 22 по- 45 ступает выходное напряжение U. датчика 13 тока, величина которого пропорциональна току электродвигателя 1, образуя отрицательную обратную связь по току. Одновременно напряжеусилитель 21 регулятора 12 тока, на которьй через сопротивление 22 по- 45 ступает выходное напряжение U. датчика 13 тока, величина которого про порциональна току электродвигателя 1, образуя отрицательную обратную связь по току. Одновременно напряже
родвигателя, к второму - выход датчика 5 скорости ленты
Блок 8 регулируемого ограничения Q работает следующим образом.
На первый вход блока 8 регулируемого ограничения подается напряжение ограничения U , которое через сопротивления 25 и 14 запирает усилители 5 связь регулятора 10 скорости. Уси- 15 и 16. Н а второй вход блока 8 пода- литель 21 складывает напряжения U ется выходное напряжение U регулятора 10 скорости, которое через сопротивление 17 поступает на усилите- ;
ние Цо поступает на вход блока 8 ре гулируемого ограничения,- выходное напряжение Ug которого поступает че рез сопротивление 23 на вход усилителя 17, замыкая тем самым обратную
1
и и, и на его выходе появляется н пряжение и„ управления тиристорным преобразователем 3,
янно сравнивается с напряжением U, Если напряжение U по величине достигает напряжения U-, , то в зависимости от его полярности усилители 15 и 16 открываются и- сопротивление 23 замыкает обратную связь регулятора 10 скорости, поддерживая его выходное напряжение U на одном уровне, равном по величине U. Напряжение ограничения U-, при отсутствии проскальзывания задается источником опорного напряжения (и,и„). При проскальзывании напряжение ограничения и, задаваемое источником 9 опорного напряжения, уменьшается на величину, пропорциональную проскальзыванию и Ug-K(u)u)p . В этом случае выходное напряжение U регулят.о
ра 10 скорости ограничивается на более низком уровне и поддерживается на этом уровне до тех пор, пока не исчезнет проскальзывание.
Устройство работает следующим об- разом, I
На вход усилителя 17 регулятора
10 скорости через сопротивление 18 поступает линейно нарастающее напря- , жение и, которое формируется задатчиком 1 интенсивности. Одновремен- р сопротивление 19 на усили-
тель 17 поступает выходное напряжение датчика А скорости электродвигателя, величина которого пропорцио- нальна частоте вращения электродви- жениё U , которое является задающим токового контура. Напряжение U
гателя ,,, образуя отрицательную обратную связь по скорости. Напряжения и и и складываются усилителем 17 и на его выходе появляется напрятель 17 поступает выходное напряжение датчика А скорости электродвигателя, величина которого пропорцио- нальна частоте вращения электродви- жениё U , которое является задающим токового контура. Напряжение U
поступает через сопротивление 20 на
усилитель 21 регулятора 12 тока, на которьй через сопротивление 22 по- ступает выходное напряжение U. датчика 13 тока, величина которого пропорциональна току электродвигателя 1, образуя отрицательную обратную связь по току. Одновременно напряже
связь регулятора 10 скорости. Уси- литель 21 складывает напряжения U
ние Цо поступает на вход блока 8 регулируемого ограничения,- выходное напряжение Ug которого поступает через сопротивление 23 на вход усилителя 17, замыкая тем самым обратную
связь регулятора 10 скорости. Уси- литель 21 складывает напряжения U
1
и и, и на его выходе появляется напряжение и„ управления тиристорным преобразователем 3,
15ремя пуска конвейера находится в обратной зависимости от пускового. момента.
С целью уменьшения времени пуска запуск осуществляется с максимально допустимым пусковым моментом. При повышении быстродействия электропривода растут динамические усилия, которые повьшают динамические нагрузки на ленту и увеличивают вероятность появления пробуксовки ленты относительно приводного барабана. Для контроля проскальзывания в устройстве .применен датчик 5 .скорости ленты, выходное напряжение которого, пропор- циональное угловой скорости ленты , поступает на вход сумматора 6, где сравнивается с выходным напряжением 1)4 датчика 4 скорости электродвигателя .
Выходное напряжение сумматора 6, определяющее величину проскальзывания 4-и5- К(0),- OL) , поступает на вход сумматора 7. Одновременно на его вход поступает напряжение U с выхода источника 9 опорного напряжения, которое задает уровень ограничения . Уровень ограничения определяется допустимым значением тока электродвигателя 1, не превьшающим мак- симального значения. Сумматор 7 алгебраически суммирует напряжение U и и и на его вьгходе появляется результирующее напряжение U.J Uj-U , определяющее новый уровень ограничения. При появлении проскальзывания U увеличивается, а и., уменьшается, следовательно, уменьшается напряжение на йыходе регулятора 10 скорости. Напряжение через сопротивления 25 и 14 поступает на вход усилителей 15 и 16 блока 8 регулируемого ограничения и запирает их. Если напряжение U,p на выходе регулятора 10 скорости больше
или равно U.J, то в зависимости от U, срабатывает блок 8 регулируемого
лярности сигнала один из усилителей 15 1ШИ 16 блока 8 регулируемого ограничения срабатывает, его выходное напряжение изменяет полярность и поступает на вход усилителя 17 регулятора 10 скорости через сопротивление 23. Цепь обратной связи регул.ято- ра 10 скорости замыкается и выходное напряжение регулятора 10 скорости поддерживается на одном уровне, рав50
55
ограничения, замыкая обратную связь регулятора 10 скорости, и на выходе регулятора 10 скорости устанавливается напряжение, равное Ц . Выходное напряжение регулятора 10 скорости Ц поступает на вход регулятора 12 тока и контур тока отрабатывает зада ние, т.е. разгон происходит с постоянным моментом. Появляется напряжение обратной связи по скорости 1)4 Кш, которое уменьшает задающее напряжение и контура скорости. По мере роста скорости выходное напряжение регулятора 10 скорости уменьном напряжению U. . Ограничение выходного напряжения регулятора 10 скорости соответствует напряжению U, ко- . торое определяется величиной проскальзывания, что позволяет изменять величину пускового момента в функции проскальзывания. Пуск осуществляется подачей ступенчатого напряжения LV на задатчик 11 интенсивности, которое преобразуется в плавно нарастающее на его выходе напряжение закону
и„ ITO
-- т;
где и - выходное напряжение задатчика интенсивности; t - время интегрирования; T, - постоянная интегрирования,
T,RC; и. - выходное напряжение задатчика интенсивности. Напряжение U является задающим для контура скорости, определяя скорость, с которой разгоняется электропривод, и поступает на вход регулятора 10 скорости передаточной функцией которого является коэффициент усиления регулятора 10 скорости Wp(, Kpj. На второй вход регулятора 10 скорости поступает напряжение обратной связи по скорости, пропорциональное скорости электродвигателя 1 U rKw,. Выходное напряжение U, пропорционально алгебраической сумме задающего на пряжения И, и напряжения обратной связи по скорости и4
VKp.c(UirU4). в начальный момент пуска, когда
скорость равна нулю, напряжение обратной связи по скорости также равно нулю . Выходное напряжение регулятора 10 скорости и,, увеличивается пропорционально нарастанию заи«
даюр1его напряжения U, т.е Kp.cU. Когда выходное напряжение достигает напряжения ограничения
ограничения, замыкая обратную связь регулятора 10 скорости, и на выходе регулятора 10 скорости устанавливается напряжение, равное Ц . Выходное напряжение регулятора 10 скорости Ц поступает на вход регулятора 12 тока и контур тока отрабатывает задание, т.е. разгон происходит с постоянным моментом. Появляется напряжение обратной связи по скорости 1)4 Кш, которое уменьшает задающее напряжение и контура скорости. По мере роста скорости выходное напряжение регулятора 10 скорости уменьU с т a- TO
шается .рс (,) и когда нет меныче напряжения ограничения Uj , регулятор скорости 10 выходит из ограничения. При появлении проскальзывания напряжение ограничения уменьшается в функции проскальзывания и и j-KCto - u)j) и ограничение выходного напряжения регулятора 10 скорости наступает на более низком уровне.
Задание на ток уменьшается, следовательно, уменьшается движущий момент который пропорционален току электродвигателя 1 (). При исчезновении проскальзывания ограничение снимается и происходит дальнейшее увели чение момента,
Б установившемся режиме работы тоже нгвозможна пробуксовка ленты относительно приводного барабана, чт может быть вызвано появлением влаги на конвейерной ленте или на футеровке приводного барабана, а также другими причинами. Устранение проскальзывания в этом случае осуществляется изменением момента электродвигателя 1 в функции проскальзывания,
Во время пуска и работы конвейера сигнал с сумматора 6, пропорциональный величине проскальзывания, выдается.постоянно в устройство контроля проскальзывания, которое при длительном проскальзывании выдает сигнал на отключение электропривода для предотвращения аварийной ситуации.
Формула
б р е т е и
0
Устройство для управления э;гектро- приводом конвейера, содержащее ти- ристорный преобразователь, выход которого через датчик тока подключен к электродвигателю конвейера, на валу которого находится датчик скорости двигателя, выход которого подключен к первому входу регулятора скорости, к второму входу которого подключен задатчик интенсивности, а к третьему - выход блока ограничения, выход регулятора скорости подключен к
5 первому входу блока ограничения и к первому входу регулятора тока, к второму входу которого подключен датчик тока, а выход регулятора тока подключен к тиристорному преобразователю, отличающееся тем, что, с целью улучшения пусковых свойств конвейера, оно снабжено двумя сумматорами, источником опорного напряжения и датчиком скорости ленты, установ5 ленным в точке набегания ленты на приводной барабан, выход которого подключен к первому входу первого сумматора, к второму входу которого подключен датчик скорости двигателя, а выход первого сумматора подключен к первому входу второго сумматора, к второму входу которого подключен источник опорного напряжения, а выход второго сумматора подключен к второму входу блока ограничения о
0
1Риг.8.

| название | год | авторы | номер документа |
|---|---|---|---|
| Промежуточный вакуум-привод ленточного конвейера | 1986 |
|
SU1426897A1 |
| Электропривод постоянного тока | 1982 |
|
SU1069108A1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД МНОГОКРАТНОГО ПРЯМОТОЧНОГО ВОЛОЧИЛЬНОГО СТАНА | 1997 |
|
RU2158469C2 |
| Способ управления двухбарабанным ленточным конвейером | 1984 |
|
SU1286474A1 |
| Электропривод постоянного тока | 1983 |
|
SU1115188A1 |
| Способ пуска частотно-управляемого асинхронного электродвигателя | 1988 |
|
SU1534738A2 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Электропривод | 1986 |
|
SU1372580A1 |
| Электропривод постоянного тока с двухзонным регулированием скорости | 1984 |
|
SU1159139A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1987 |
|
SU1534736A1 |
Изобретение относится к средствам автоматизации регулирующего электропривода ленточных конвейеров. С целью улз шения пусковых свойств конвейера 2 устр-во снабжено установленным в точке набегания ленты на приводной барабан датчиком 5 скорости ленты, источником 9 опорного напряжения и двумя сумматорами 6 и 7. На входы сумматора 6 поступают сигналы с датчиков 5 и 4 скоростей эл. двигателя (ЭД) 1 и ленты. Выходной сигнал сумматора 6, пропорциональный величине проскальзывания, поступает на сумматор 7, где алгебраически суммируется с сигналом с источника 9 опорного напряжения. На выходе сум- .матора 7 появляется сигнал, определяющий новый уровень ограничения выходного напряжения регулятора 10 скорости, которое определяется величиной проскальзывания и через регулятор 12 тока поступает на вход тирис торного преобразователя 3. Последний включен в силовую цепь приводного ЭД 1 конвейера 2. Во время пуска и работы конвейера 2 сигнал с сумматора 6 выдается постоянно в устр-во контроля проскальзывания для изменения момента ЭД 1 в функции проскальзывания. При длительном проскальзывании выдается сигнал на отключение ЭД 1 для предотвращения аварийной ситуации. 2 ил. (С
| Соколовский В.А | |||
| Управление электроприводами | |||
| Л.: Энергоиздат, 1982, с | |||
| Устройство для охлаждения водою паров жидкостей, кипящих выше воды, в применении к разделению смесей жидкостей при перегонке с дефлегматором | 1915 |
|
SU59A1 |
