Изобретение относится к области автоматического управления двухбарабанными ленточными конвейерами.
Целью изобретения является повышение точности управления конвейерной установкой во время протекания динамических режимов путем компенсации колебаний тягового органа.
Эта цель достигается тем, что компенсируют колебания, обусловленные взаимоструктурной схемы конвейера колебания, находящиеся в противофазе с колебаниями в перекрестных связях.
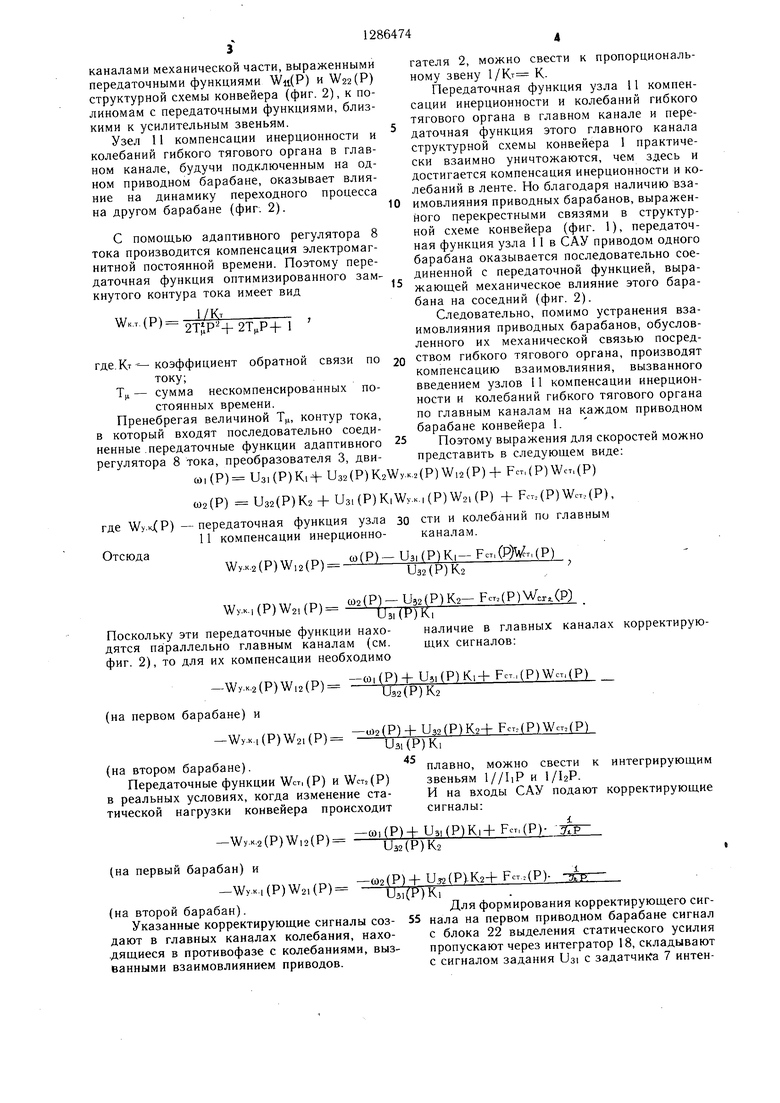
На фиг. I представлена структурная схема конвейера как объекта регулирования; на фиг. 2 - структурная схема устройства, реализующего способ; фиг. 3 - функциональная схема этого устройства.
Частоты вращения приводных барабанов.
влиянием приводов конвейера, путем форми- ю выраженные через передаточные функции
рования на входе САУ корректирующих структурной схемы конвейера, могут быть
сигналов, создающих в главных каналах представлены в общем виде так (см. фиг. 1):
a),(P)F,(P)Wu(P)+F2(P)-W,2(P)+FcT,(P)-Wcr,(P)
Fcr,(P),) WCT,(P), WCT,(P)
Wll(P),W22(P), W,2(P),W2l(P)
X,(P),X2(P)
a)2(P)F2(P)W22(P)+Fi где FI (P),F2(P) - приложенные усилия
со стороны приводных двигателей; статические усилия со стороны нагрузки на приводных барабанах; передаточные функции, описывающие колебания в гибком тяговом органе при ступенчатом приложении статической нагрузки; передаточные функции, описывающие колебания в ленте по главным каналам и в перекрестных связях, выражающих взаимовлияние приводов при изменении управляющих воздействий; перемещения в соот- ствующих точках.
Устройство, реализующее способ управления двухбарабанным конвейером 1, включает системы автоматического управления электроприводами двух приводных барабанов, на каждом из которых последовательно подключены двигатель 2, преобразователь 3, блок 4 регуляторов и соединенный с ним через сумматор 5 блок 6 компенсации колебаний в ленте, вызванных влиянием соседнего приводного барабана, а также задатчик 7 интенсивности (фиг. 3).
В состав блока 4 регуляторов входят последовательно соединенные адаптивный регулятор тока 8, сумматор 9, к которому подключен датчик 10 тока, образующие узел 11 компе нсации инерционности и колебаний гибкого тягового органа в главном канале два пропорционально-интегральных (ПИ) регулятора скорости 12 и 13 и сумматор 14.
Блок 6 компенсации колебаний в ленте, вызванных влиянием соседнего приводного барабана, состоит из усилителя 15, сумматора 16, делителя 17 и интегратора 18. Усилитель 15 подключен к сумматору 16 и к второму входу (знаменатель) делителя 17,
структурной схемы конвейера колебания, находящиеся в противофазе с колебаниями в перекрестных связях.
На фиг. I представлена структурная схема конвейера как объекта регулирования; на фиг. 2 - структурная схема устройства, реализующего способ; фиг. 3 - функциональная схема этого устройства.
Частоты вращения приводных барабанов.
0
5
0
5
)W2l(P)+ FcT.(P) WcT.(P),
который находится в аналогичном блоке 6 системы управления приводом соседнего барабана. Интегратор 18 также подключен к сумматору 16, выход последнего соединен с первым входом (числитель) делителя 17, с помощью которого весь блок 6 компенсации колебаний в ленте, вызванных влиянием соседнего приводного барабана, соединен с сумматором 5.
Датчик 19 частоты вращения подключен к сумматорам 5, 9, 14 и 16 и к задатчику 7 интенсивности, выход которого соединен с усилителем 15 и сумматором 5.
Кроме того, устройство снабжено блоками и датчиками, общими для систем управления приводами обоих барабанов.
Датчик 20 момента инерции подсоединен к сумматорам 5 и 14 каждого приводного барабана. К сумматорам 5 подключены также блок 21 перераспределения нагрузки между приводными барабанами и блок 22 выделения статического усилия, который,кроме того, соединен с блоками 6 компенсации колебаний в ленте, вызванных взаимовлиянием приводных барабанов, путем подключения к интеграторам 18.
Конвейерные весы 23 подключены к за- датчикам 7 интенсивности.
Способ осуществляется следующим образом.
Сигнал, снимаемый с конвейерных весов 23 и пропорциональный количеству поступающего на конвейер 1 грузопотока, является величиной задания скорости ленты кон- вейера 1 и подается на входы систем управления приводами каждого барабана через задатчики 7 интенсивности, что позволяет производить формирование задающего сигнала согласно требованиям технологии НС учетом предельно допустимых значений ускорений транспортных установок.
Двукратное применение видоизмененного принципа подчиненного регулирования . на каждом приводном барабане (блоки 4 регуляторов) позволяет свести передаточные 55 функции электрической части системы, состоящей из приводных двигателей каждого барабана 2, преобразователей 3 и блоков 4 регуляторов, в совокупности с главными
0
гателя 2, можно свести к пропорциональному звену 1/Кт КПередаточная функция узла 11 компенсации инерционности и колебаний гибкого тягового органа в главном канале и передаточная функция этого главного канала структурной схемы конвейера 1 практически взаимно уничтожаются, чем здесь и достигается компенсация инерционности и колебаний в ленте. Но благодаря наличию вза- 10 имовлияния приводных барабанов, выраженного перекрестными связями в структурной схеме конвейера (фиг. 1), передаточная функция узла 11 в САУ приводом одного барабана оказывается последовательно соединенной с передаточной функцией, выра- жающей механическое влияние этого барабана на соседний (фиг. 2).
Следовательно, помимо устранения взаимовлияния приводных барабанов, обусловленного их механической связью посред- где.Кт -коэффициент обратной связи по 20 ством гибкого тягового органа, производят
каналами механической части, выраженными передаточными функциями Wit(P) и W22(P) структурной схемы конвейера (фиг. 2), к полиномам с передаточными функциями, близкими к усилительным звеньям.
Узел 11 компенсации инерционности и колебаний гибкого тягового органа в главном канале, будучи подключенным на одном приводном барабане, оказывает влияние на динамику переходного процесса на другом барабане (фиг. 2).
С помощью адаптивного регулятора 8 тока производится компенсация электромагнитной постоянной времени. Поэтому передаточная функция оптимизированного замкнутого контура тока имеет вид
1/Кт
WK.T.(P) 2TjP42T P-f 1
току;
Т - сумма нескомпенсированных постоянных времени.
Пренебрегая величиной Тц, контур тока, в который входят последовательно соединенные .передаточные функции адаптивного регулятора 8 тока, преобразователя 3, двиOJ,(P) U3l(P)Kl+ U32(P)K2Wy.K.2(P)Wl2(P)+ FcT,(P)WcT,(P) Ш2(Р) U32(P)K2 + U3l(P)K|Wy.K.|(P)W2l(P) + FcT.(P)WcT,(P),
где ) - передаточная функция узла зо сти и колебаний по главным 11 компенсации инерционно-каналам.
«лаca(P)-U3i(P)Ki-Fc.(P)W.,(P)
Wy.K.2(P)W,2(P)
)2(P-)-y32(P)K2-FcT.(P)Wcr.(P)
Wy.K,(P)W2,(P)(j3i(P)I,
Поскольку эти передаточные функции находятся параллельно главным каналам (см. фиг. 2), то для их компенсации необходимо
-Wy.K.2(P)W,2(P) -.(P)+U|.(P)K.+ Fc..,(P)WcMP)
U32V J
(на первом барабане) и
-Wy.M(P)W2.(P) (P)(P)K2+FcMP)Wc.(P)
Uai (.И)
наличие в главных каналах щих сигналов:
(на втором барабане).
Передаточные функции WCT, (Р) и WcTj(P) в реальных условиях, когда изменение статической нагрузки конвейера происходит
-Wy-K.2(P)Wl2(P)
(на первый барабан) и
-u)i(P)+U3i(P)Ki+ FcT,(P)U32(P)K2
W (P)+U52(P K2+FcT.(P).
-wy.K.i(p)W2,(p) -IJ3;(P)K,
(на второй барабан).Для формирования корректирующего сиг- Указанные корректирующие сигналы соз- 55нала на первом приводном барабане сигнал дают в главных каналах колебания, нахо-с блока 22 выделения статического усилия .дящиеся в противофазе с колебаниями, выз-пропускают через интегратор 18, складывают ванными взаимовлиянием приводов.с сигналом задания Уз с задатчи1 а 7 интенкомпенсацию взаимовлияния, вызванного введением узлов 11 компенсации инерционности и колебаний гибкого тягового органа по главным каналам на каждом приводном барабане конвейера 1.
Поэтому выражения для скоростей можно представить в следующем виде:
наличие в главных каналах корректирующих сигналов:
плавно, можно свести к интегрирующим
звеньям l//IiP и l/bP.
И на входы САУ подают корректирующие
сигналы:
-u)i(P)+U3i(P)Ki+ FcT,(P)U32(P)K2
i
сивности, умноженным пропорциональности Ki
(усили20
на коэффициент
Ш|(Р
U3i(P)
тель 15), вычитают сигнал с датчика 19 частоты вращения и делят с помощью дели- теля 17 на сигнал задания на втором приводном барабане, умноженный на коэффи„С02(Р)/
циент пропорциональности К2 JTp)(
литель 15 на втором приводном барабане). Q
Формирование корректирующего сигнала на втором приводном барабане производится аналогично. Обратные связи должны быть осуществлены по всем выходным координатам скорости.
Устройство, реализующее способ, рабо- 15 тает следующим образом.
Конвейерные весы 23 измеряют погонную нагрузку конвейера.
Сигнал с конвейерных весов 23 подается на задатчик 7 интенсивности САУ приводом каждого приводного барабана. ;
В каждый задатчик 7 интенсивности заводят отрицательную обратную связь по частоте вращения (в задатчике 7 интенсивности производят сравнение сигнала с конвейерных весов 23 с сигналом с датчика 19 25 частоты вращения, пропорциональным текущему значению частоты вращения электродвигателя на приводном барабане). Сформированный в задатчике 7 интенсивности сигнал задания Уз, складываясь в сумматоре 5 с корректирующими сигналами, зо поступающими с датчика 19 частоты вращения, с датчика 20 момента инерции, с блока 21 перераспределения нагрузки между приводными барабанами и с блока 22 выделения статического усиления, образует управляющий сигнал, поступающий в блок 4 регуляторов. Здесь организована система управления, основанная на двукратном применении видоизмененного принципа подчиненного регулирования, которая позволяет осуществить оптимизацию контуров тока и скорости по главным каналам. За счет этого в главных каналах устраняются инерционности, выражающиеся электромагнитной и электромеханической постоянными времени, и колебания гибкого тягового органа при изменении управляющих воздействий.
Математически это выражается сведением практически к пропорциональному звену последовательно соединенных передаточных функций блока 4 регуляторов, преобразователя 3 и двигателя 2 структурной схемы электрической части и соответствующего главного Канала структурной схемы конвейера на каждом приводном барабане (см. фиг. 2).
Остаются лишь те колебания, которые
35
40
бана блок 6 компенсации колебаний в ленте, вызванных влиянием соседнего приводного барабана. С цомощью блока 6 в главном канале искусственно создают колебания, которые взаимно уничтожаются с реально существующими колебаниями, вызванными влиянием соседнего приводного барабана.
Корректирующий сигнал, создающий такие колебания, получают следующим образом.
В блоке 6 сигнал задания Уз усиливается с помощью усилителя 15 с коэффициентом усиления Ki и подается в сумматор 16, где складывается с инвертированным сигналом с датчика 19 частоты вращения и с пропущенным через интегратор 18 сигналом, пропорциональным приложенному статическому усилию на соответств-ующем приводном барабане, взятым с блока 22 выделения статического усилия.
Выходной сигнал сумматора 16 делится Б делителе 17 на сигнал задания другого приводного барабана, усиленный в аналогичном усилителе 15 с коэффициентом усиления К2.
Деление на ноль в делителе 17 исключено, так как операции по формированию корректирующего сигнала, направленного на устранение взаимовлияния приводных барабанов, производятся как второй шаг после компенсации инерционностей и колебаний по главным каналам, а следовательно, уже обязательно при наличии задающего сигнала.
В результате работы блоков 4 регуляторов и блоков 6 компенсации колебаний в ленте, вызванных взаимовлиянием приводных барабанов, получаются два независимых канала управления приводом каждого приводного барабана.
Выходные величины, которыми являются частоты вращения электродвигателей приводных барабанов, прямо пропорциональ ны управляющим сигналам.
Формула изобретения
45
Способ управления двухбарабанным ленточным конвейером, основанный на изменении частоты вращения двигателей в зависимости от изменения грузопотока, отличающийся тем, что, с целью повышения точности управления во время протекания динамических режимов путем компенсации колебаний тягового органа, обусловленных взаимовлиянием приводов кон- 50 вейера, формируют корректирующий сигнал для каждого двигателя как отношение результирующей, являющейся суммой инвертированного сигнала частоты вращения первого электродвигателя и сигналов, обусловленных статическим и тяговым усиобусловлены взаимовлиянием приводных 55 лиями, к сигналу составляющей частоты
барабанов. Для их устранения вводят в САУ приводом каждого приводного баравращения второго электродвигателя, обусловленной его тяговым усилием.
бана блок 6 компенсации колебаний в ленте, вызванных влиянием соседнего приводного барабана. С цомощью блока 6 в главном канале искусственно создают колебания, которые взаимно уничтожаются с реально существующими колебаниями, вызванными влиянием соседнего приводного барабана.
Корректирующий сигнал, создающий такие колебания, получают следующим образом.
В блоке 6 сигнал задания Уз усиливается с помощью усилителя 15 с коэффициентом усиления Ki и подается в сумматор 16, где складывается с инвертированным сигналом с датчика 19 частоты вращения и с пропущенным через интегратор 18 сигналом, пропорциональным приложенному статическому усилию на соответств-ующем приводном барабане, взятым с блока 22 выделения статического усилия.
Выходной сигнал сумматора 16 делится Б делителе 17 на сигнал задания другого приводного барабана, усиленный в аналогичном усилителе 15 с коэффициентом усиления К2.
Деление на ноль в делителе 17 исключено, так как операции по формированию корректирующего сигнала, направленного на устранение взаимовлияния приводных барабанов, производятся как второй шаг после компенсации инерционностей и колебаний по главным каналам, а следовательно, уже обязательно при наличии задающего сигнала.
В результате работы блоков 4 регуляторов и блоков 6 компенсации колебаний в ленте, вызванных взаимовлиянием приводных барабанов, получаются два независимых канала управления приводом каждого приводного барабана.
Выходные величины, которыми являются частоты вращения электродвигателей приводных барабанов, прямо пропорциональ ны управляющим сигналам.
Формула изобретения
Способ управления двухбарабанным ленточным конвейером, основанный на изменении частоты вращения двигателей в зависимости от изменения грузопотока, отличающийся тем, что, с целью повышения точности управления во время протекания динамических режимов путем компенсации колебаний тягового органа, обусловленных взаимовлиянием приводов кон- вейера, формируют корректирующий сигнал для каждого двигателя как отношение результирующей, являющейся суммой инвертированного сигнала частоты вращения первого электродвигателя и сигналов, обусловленных статическим и тяговым усилиями, к сигналу составляющей частоты
вращения второго электродвигателя, обусловленной его тяговым усилием.
CpUB.J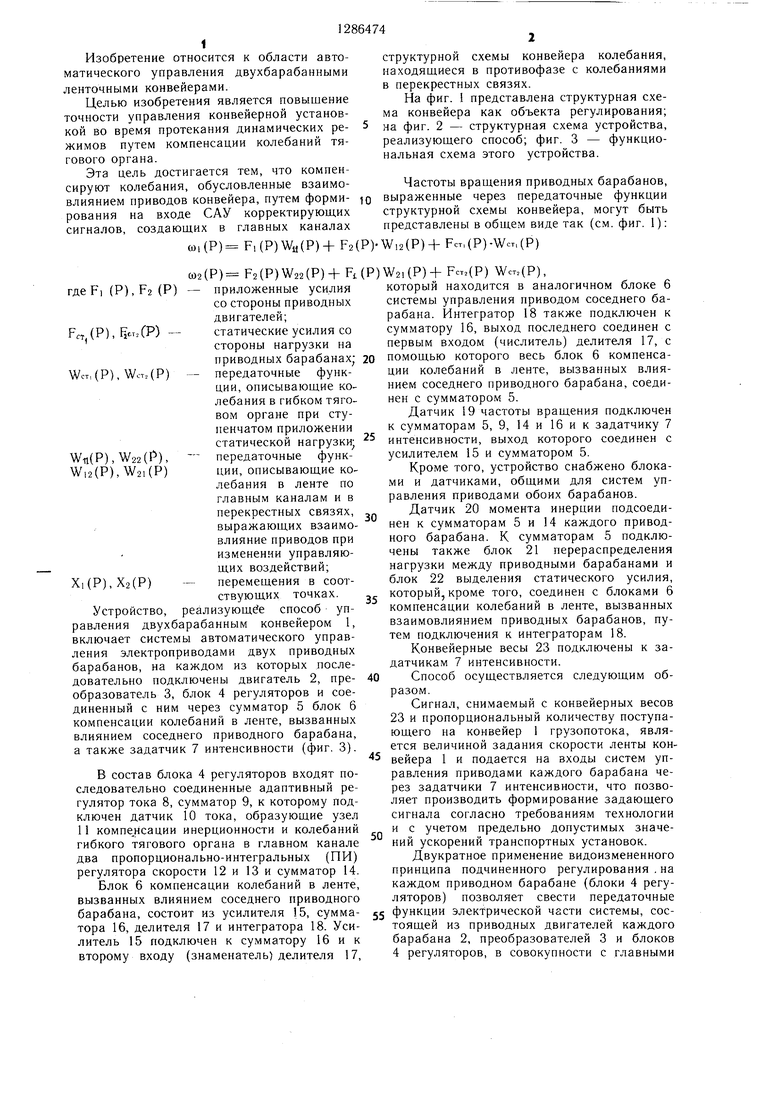

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления многоприводной подъемно-транспортной установкой с гибким тяговым органом | 1986 |
|
SU1425141A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| Устройство для формирования сигнала обратной связи системы управления гидроагрегатом | 1977 |
|
SU947821A1 |
| Устройство для управления подъемнотранспортной установкой с гибким тяговым органом | 1975 |
|
SU602430A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2007 |
|
RU2332581C1 |
| Система автоматического управления | 1982 |
|
SU1113781A1 |
| Система для передачи телеизмерительной информации | 1981 |
|
SU1023379A2 |
| Система управления пресс-гранулятором | 1984 |
|
SU1194690A1 |
| Устройство для регулирования производительности компрессора | 1987 |
|
SU1562534A1 |
| Устройство для управления приводом робота | 1987 |
|
SU1579770A1 |

Изобретение относится к области конвейерного транспорта и позволяет с высокой точностью управлять конвейерной установкой во время протекания динамических режимов. Для этого осуществляют компенсацию колебаний (К) бегового органа, обусловленных взаимовлиянием приводов конвейера. В зависимости от изменения грузопотока изменяют частоту вращения (ЧВ) электродвигателей (ЭД) приводных барабанов. При этом компенсируются инерционности и К по главным каналам. Для компенсации взаимовлияния ЭД приводов конвейера для каждого ЭД формируют корректирующий сигнал. Сначала находят сумму инвертированного сигнала ЧВ одного ЭД и сигналов, обусловленных статическим и тяговым усилиями. Затем определяют откощение этой суммы к сигналу составляющей ЧВ другого ЭД, обусловленной его тяговым усилием. Сформированные корректирующие сигналы создают в главных каналах К, находящиеся в противофазе с К, вызванными взаимо- а влиянием приводов. Выходные величины (ЧВ приводов) каждого полученного независимо го канала управления приводом каждого приводного барабана прямо пропорциональны управляющим сигналом. 3 ил. (Л гчэ СХ) О5 
УЗТ
Z
Ш
Контир TOKO Збено элЕктро меха yfj ,u u нической
/Ш
11
U32
1 FCT, (P)
Wll
Ш
ме /
/Ш
2
Фиг.3
| Запенин И | |||
| В., Бельфор В | |||
| Е | |||
| и др | |||
| Моделирование переходных процессов ленточных конвейеров | |||
| М.: Недра, 1976, с | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Назаренко В | |||
| М | |||
| Построение оптимизированных на динамичность систем управления ленточными конвейерами.- Известия ВУЗов | |||
| Горный журнал, 1980, № 3, с | |||
| Способ размножения копий рисунков, текста и т.п. | 1921 |
|
SU89A1 |
