4
to
ot
00
со
Изобретение относится к конвейерному транспорту и может быть использовано во всех отраслях промышленности, где применяют ленточные конвейеры, транспортирующие груз на большие расстояния. ; Целью изобретения является повышение надежности работы привода.
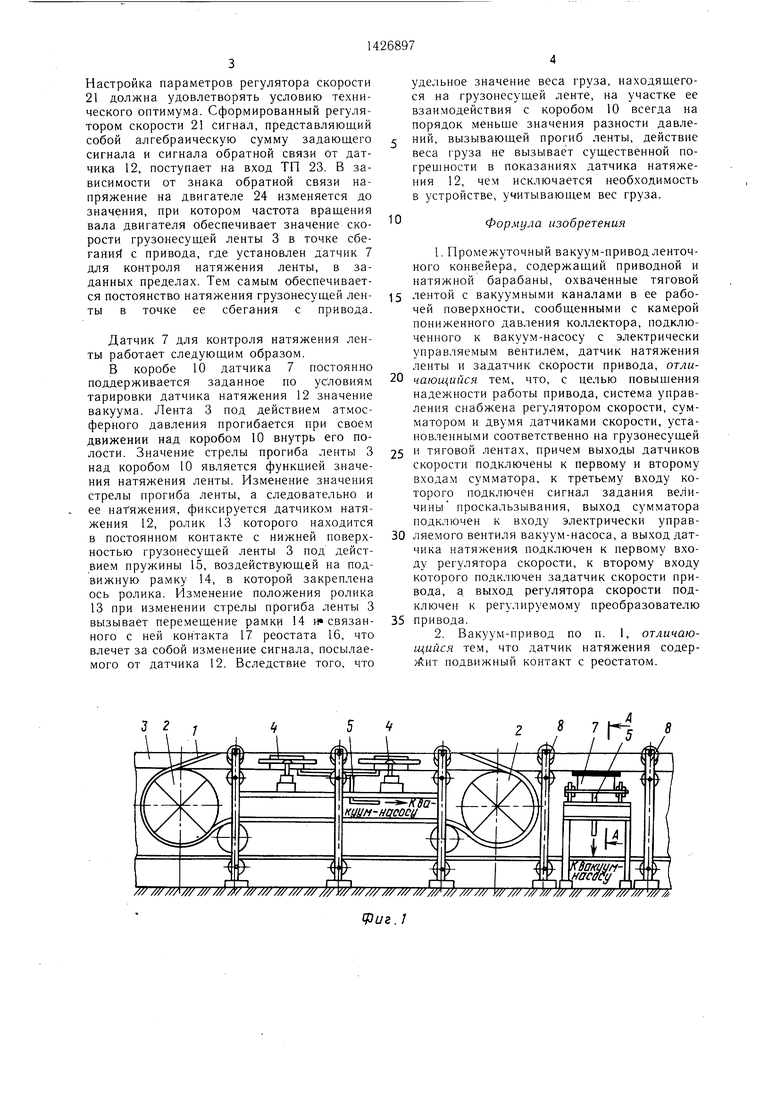
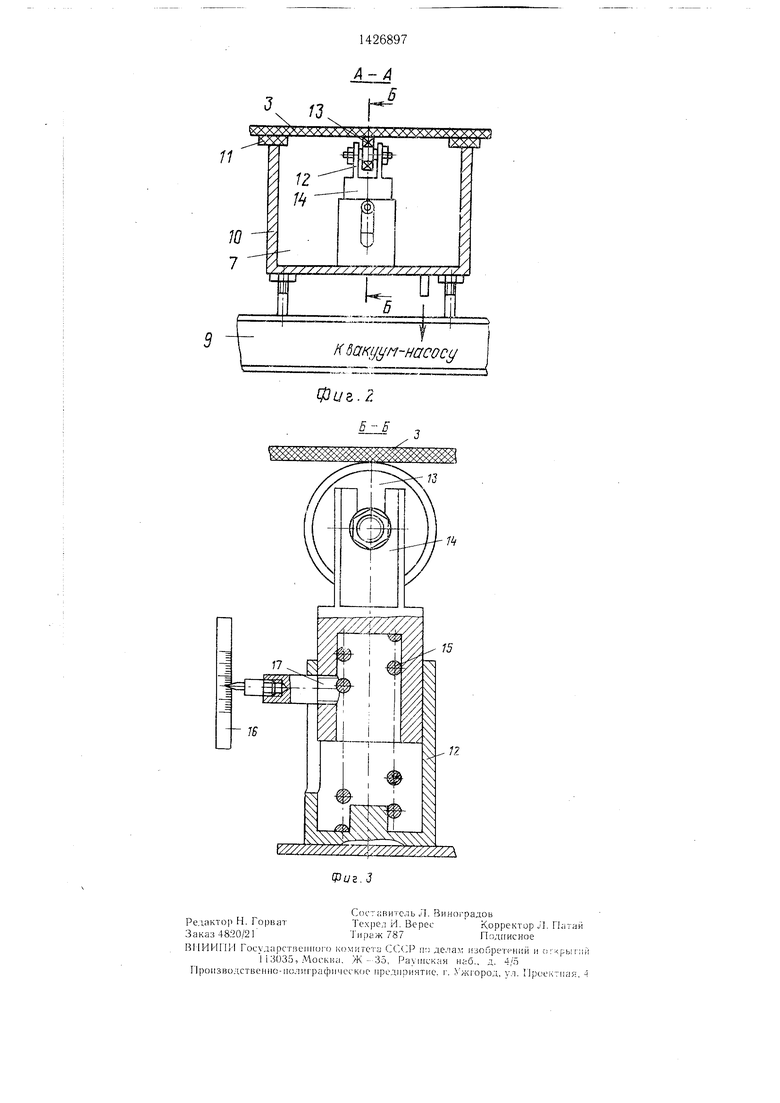
На фиг. 1 изображен привод, общий вид; на фиг. 2 - разрез А-А на фиг. 1 (разрез по поперечной оси устройства для контроля натяжения грузопесущей ленты); на фиг. 3 - разрез Б-Б на фиг. 2 (разрез по продольной оси датчика перемещения); на фиг. 4 - принципиальная схема взаимодействия элементов цепи и ап- TiapaTOB системы автоматического регулирования работы промежуточных вакуум-приводов.
; Промежуточный вакуу.м-привод состоит 1из тяговой ленты , охватывающей привод- {ной и натяжной барабаны 2 и располо жепной под грузонесушей лентой 3. В ра- (бочей обкладке тяговой ленты 1 с ва- ;куумными каналами выполнены глухие на- зы, связанные отверстиями с коллекторами 4 :с камерой пониженного давления, расположенными под тяговой лентой 1. Коллек- торы связаны вакуум-трубонроводом 5 с вакуум-насосом бис датчиком 7 для контроля натяжения грузонесущей ленты. Датчик 7 для контроля натяжения располо- жен за приводным барабаном 2 между роликоопорами 8 на раме 9 и включает герметичный короб 10 с футеровкой 11 из низкофрикционного материала на его наружной поверхности. В центральной части дна короба 10 расположен датчик 12 натяжения, состоящий из ролика 13, связанного с подвижной рамкой 14 пружиной 15. Рамка 14 связана с реостатом 16 при помощи подвижного контакта 17. Грузонесущая 3 и тяговая 1 ленты имеют силовой контакт с датчиками скорости 18 ленты устройства для контроля проскальзывания грузонесущей и тяговой лент, связанными с сумматором 19 определения наличия проскальзывания, связанным в свою очередь с двигателем электрически управляемого вентиля 20.
Регулятор скорости 21 имеет электрическую связь с задатчиком скорости 22 привода, с датчиком 12 натяжения, а также с тиристорным преобразователем (ТП) 23 двигателя 24 привода.
Вакуум-привод работает следующим образом.
До пуска электродвигателя 24 промежуточного привода производится включение вакуум-насоса 6, который через трубопровод 5 откачивает воздух из коллекторов 4, сообщенных с ними отверстий и пазов тяговой ленты 1, а также из короба 10 датчика 7, При этом создается разряжение между грузонесущей 3 и тяговой 1 лен
тами, которые прижимаются друг к другу давлением, равным разности между атмосферным и остаточным давлением между лентами, что обеспечивает надежное сцепление
лент. Создание разряжения в коробе 10 ведет к прогибу грузонесущей ленты 3, действующей на ролик 13 датчика 7, который опускается вместе с рамкой 14, сжимает пружину 15 и смещает подвижной контакт 17 относительно реостата 16. Сопротивление последнего изменяется на величину, пропорциональную натяжению грузонесущей ленты. Выходной сигнал датчика 7 поступает на регулятор скорости 21, где величина этого сигнала сравнивается с за5 дающим сигналом задатчика скорости 22, пропорциональным заданному натяжению грузонесущей ленты. После пуска электродвигателя 24 привода приводится во вращение барабан 2, который передает движение ленте 1, движущей грузонесущую лен0 ту 3. Когда фрикционная связь между лентами 1 и 3 оказывается недостаточной для приведения в движение грузонесущей ленты 3, начинается проскальзывание тяговой ленты 1 относительно грузонесущей
2 ленты 3. Вследствие этого значения скоростей лент различные. Это зафиксируется датчиками скорости 18, связанными с сумматором 19. Датчиком скорости 18 грузонесущей ленты подается сигнал напряжения положительной полярности, а датчиком ско0 рости 18 тяговой лепты - сигнал напряжения отрицательной полярности. Суммируясь на сумматоре 19, они дают значение выходного сигнала рассогласования, поступающего в цепь управления приводом вентиля 20, регулирующего быстроту откачки
5 вакуум-насоса 6 путем изменения количества воздуха, поступающего через пего в вакуум-трубопровод 5. Под действием сигнала рассогласования датчиков скорости 18 вентиль 20 уменьщает количество воздуха, поступающего в вакуум-трубопровод 5, что приводит к увеличению разряжения в вакуумной системе, а следовательно, на поверхности контакта лент 1 и 3. Это приводит к увеличению силы трения между лентами и устранению их относительного
5 проскальзывания. Б периоды пуска конвейера, а также при неравномерной загрузке участка грузонесущей ленты 3, ведомой приводом, в точке установки датчика 7 наблюдается изменение натяжения ленты 3. Это изменение фиксируется датчиком натя0 жения 12, контролирующим стрелу прогиба ленты 3. Выходным сигналом датчика 12 натяжения является напряжение постоянного тока, величина которого пропорциональна натяжению грузонесущей ленты 3. На общий регулятор скорости 21 каждого нри5 вода, представляющий собой ПИ-регулятор, поступает сигнал от датчика натяжения 12, а также управляющее воздействие (управляющий сигнал) от задатчика скорости 22.
0
Настройка параметров регулятора скорости 21 должна удовлетворять условию технического оптимума. Сформированный регулятором скорости 21 сигнал, представляющий собой алгебраическую сумму задающего сигнала и сигнала обратной связи от датчика 12, поступает на вход ТП 23. В зависимости от знака обратной связи напряжение на двигателе 24 изменяется до значения, при котором частота вращения вала двигателя обеспечивает значение скорости грузонесущей ленты 3 в точке сбе- ганий с привода, где установлен датчик 7 для контроля натяжения ленты, в заданных пределах. Тем самым обеспечивается постоянство натяжения грузонесущей ленты в точке ее сбегания с привода.
Датчик 7 для контроля натяжения ленты работает следующим образом.
В коробе 10 датчика 7 постоянно поддерживается заданное по условиям тарировки датчика натяжения 12 значение вакуума. Лента 3 под действием атмосферного давления прогибается нри своем движении над коробом 10 внутрь его полости. Значение стрелы прогиба ленты 3 над коробом 10 является функцией значения натяжения ленты. Изменение значения стрелы прогиба ленты, а следовательно и ее натяжения, фиксируется датчиком натяжения 12, ролик 13 которого находится в постоянном контакте с нижней поверхностью грузонесущей ленты 3 под действием пружины 15, воздействующей на подвижную рамку 14, в которой закреплена ось ролика. Изменение положения ролика 13 при изменении стрелы прогиба ленты 3 вызывает перемещение рамки 14 и« связанного с ней контакта 17 реостата 16, что влечет за собой изменение сигнала, посылаемого от датчика 12. Вследствие того, что
удельное значение веса груза, находящегося на грузонесущей ленте, на участке ее взаимодействия с коробом 10 всегда на порядок меньще значения разности давле- НИИ, вызывающей прогиб ленты, действие веса груза не вызывает существенной по- грещности в показаниях датчика натяжения 12, чем исключается необходимость в устройстве, учитывающем вес груза.
10
Формула изобретения
{. Промежуточный вакуум-привод ленточного конвейера, содержащий приводной и натяжной барабаны, охваченные тяговой
лентой с вакуумными каналами в ее рабочей поверхности, сообщенными с камерой пониженного давления коллектора, подключенного к вакуум-насосу с электрически управляемым вентилем, датчик натяжения ленты и задатчик скорости привода, отличающийся тем, что, с целью повыщения надежности работы привода, система управления снабжена регулятором скорости, сумматором и двумя датчиками скорости, установленными соответственно на грузонесущей
и тяговой лентах, причем выходы датчиков скорости подключены к первому и второму входам сумматора, к третьему входу которого подключен сигнал задания величины проскальзывания, выход сумматора подключен к входу электрически управляемого вентиля вакуум-насоса, а выход датчика натяжения подключен к первому входу регулятора скорости, к второму входу которого подключен задатчик скорости привода, а выход регулятора скорости подключен к регулируемому преобразователю
привода.
2. Вакуум-привод по п. 1, отличающийся тем, что датчик натяжения содер- йит подвижный контакт с реостатом.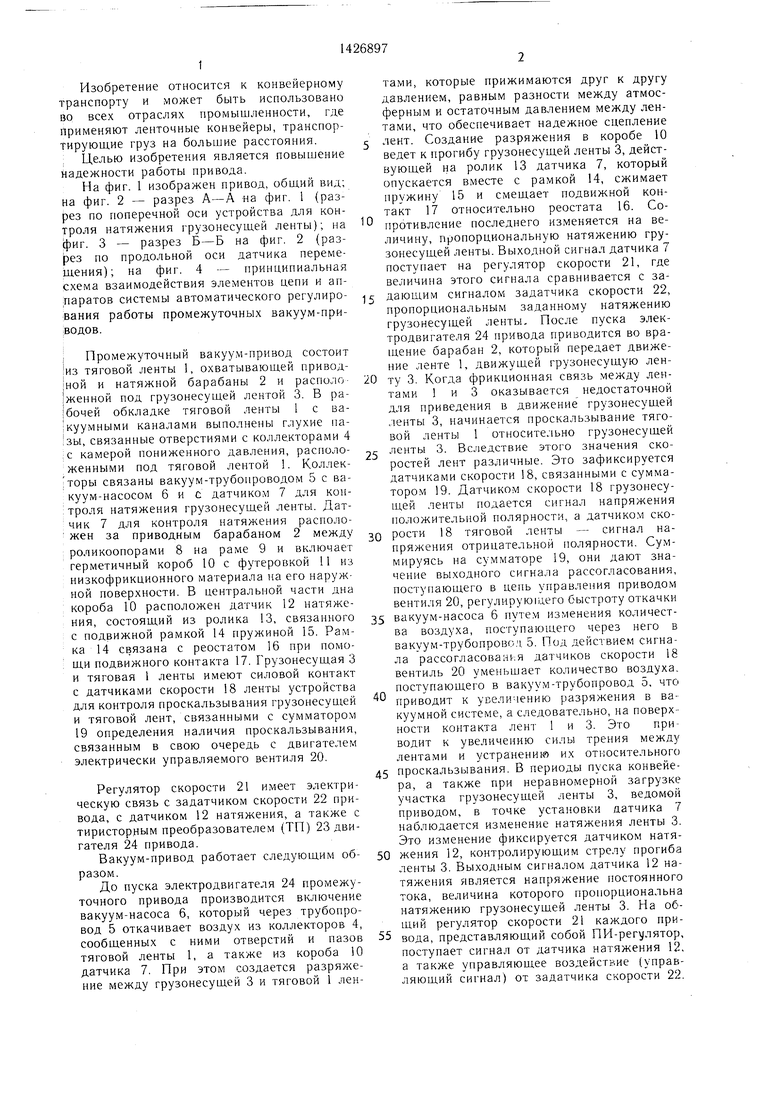
| название | год | авторы | номер документа |
|---|---|---|---|
| Система передачи грузов между судами в море в условиях качки | 1982 |
|
SU1013342A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1982 |
|
SU1049342A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1988 |
|
SU1601020A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1981 |
|
SU969584A1 |
| Способ управления процессом копания экскаватора-драглайна и устройство для его осуществления | 1989 |
|
SU1819949A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1982 |
|
SU1057368A1 |
| Система передачи грузов между судами в море | 1988 |
|
SU1594063A1 |
| Пресс непрерывного действия для изготовления древесно-стружечных плит | 1981 |
|
SU1043024A1 |
| Устройство контроля грузонесущей способности конвейера | 1989 |
|
SU1752688A1 |
| Устройство защиты стрелы от растяжки ковша экскаватора-драглайна | 1977 |
|
SU777157A1 |
Изобретение относится к конвейерному транспорту и м. б. использовано для транспортирования грузов на большие расстояния. Цель изобретения - повышение надежности работы привода. Вакуум-привод содержит приводной и натяжной барабаны 2, охваченные тяговой лентой I с вакуумными каналами в ее рабочей поверхности, грузонесущую ленту 3. Каналы сообш.ены с камерой пониженного давления коллектора 4. Он подключен к вакуум-насосу 6 с электрически управляемым вентилем 20. Вакуум-привод имеет датчик 12 натяжения ленты Г и задатчик скорости 22 привода, сум.матор 19 и два датчика 18 скорости, регулятор 21 скорости. Датчик 12 имеет подвижный контакт с реостатом. Изменение натяжения ленты 3 фиксируется датчиком 12. Уд,ельное значение массы груза, находяшегося на ленте 3, будет всегда на порядок меньше значения разности давлений, вызывающей прогиб ленты 3. Вследствие этого действия .масса груза не вызовет существенной погрешности в показаниях датчика 12, чем исключается необходимость в устр-ве, учитывающем массу груза. 1 3. п. ф-лы, 4 ил. I (Л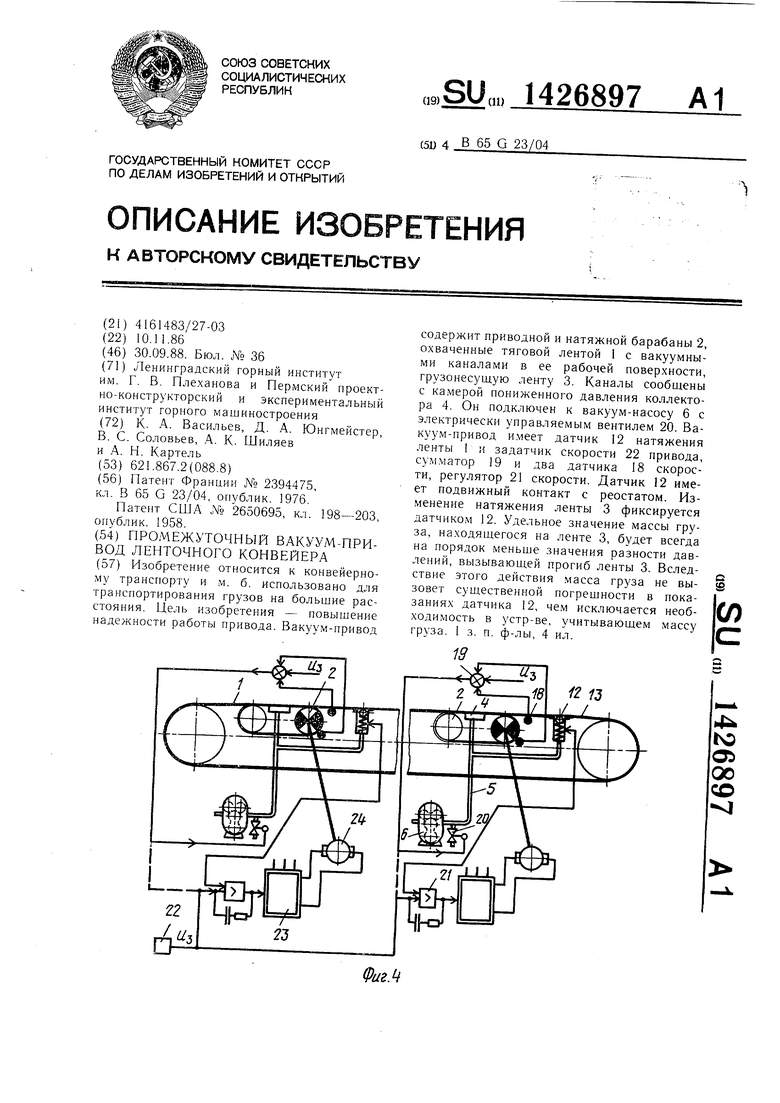
./
Б- Б , 1
| СПОСОБ ОПРЕДЕЛЕНИЯ СРОКОВ НАЧАЛА ОСЕВОЙ НАГРУЗКИ НА НИЖНЮЮ КОНЕЧНОСТЬ ПРИ ПЕРЕЛОМАХ И КОНТРОЛЬ ЕЕ ДИНАМИКИ | 2009 |
|
RU2394475C1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Планшайба для точной расточки лекал и выработок | 1922 |
|
SU1976A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СОСТОЯНИЯ ТРАНСФОРМАТОРА | 2013 |
|
RU2650695C2 |
| Складная решетчатая мачта | 1919 |
|
SU198A1 |
| Реактивная дисковая турбина | 1925 |
|
SU1958A1 |
