В ОСНОВНОМ авт. св. N° 95261 описан индуктивный датчик, якорь которого выполнен в виде винта, а полюсные надставки электромагнито; в виде гайкн или полугайки. Внутренний диаметр резьбы гайки имеет небольшой зазор относительно наружного диаметра резьбы винтового якоря. Такое выполнение дает возможность получения сплошной шкалы измерений. В то же время оно не обеспечивает компактности отсчетного устройства и требует значительного времени при настройке на заданные линейные перемеш,ения в пределах сотен и десятков миллиметров.
В описываемом индуктивном датчике отсчетное устройство выполнено в виде поворотного и передвижного по осп вспомогательного валика с расположенными на нем по спирали вь ключаюш.пми упорами. Вспомогательный валик раздельно кинематически связан с линейной шкалой сотен (при повороте валика) и лимбом десятков и единиц миллиметров (при осевом перемешении валика).
Для коррегирования механических погрешностей устройство выполнено в виде пакета коррегирующих дисков, связанных рычажным механизмом с передвиЛСным корпусом лимба отсчета малых перемешении индуктивного датчика, каждый из которых соответствует ста миллиметрам линейного перемеш,ения.
Такое выполнение описываемого индуктивного датчика обеспечивает компактность отсчетного устройства и ускорениеего настройки на заданные линейные перемешения в пределах сотен и десятков миллиметров, а также упрош;ает изготовление и повышает точность устройства для коррегирования механических ошибок.
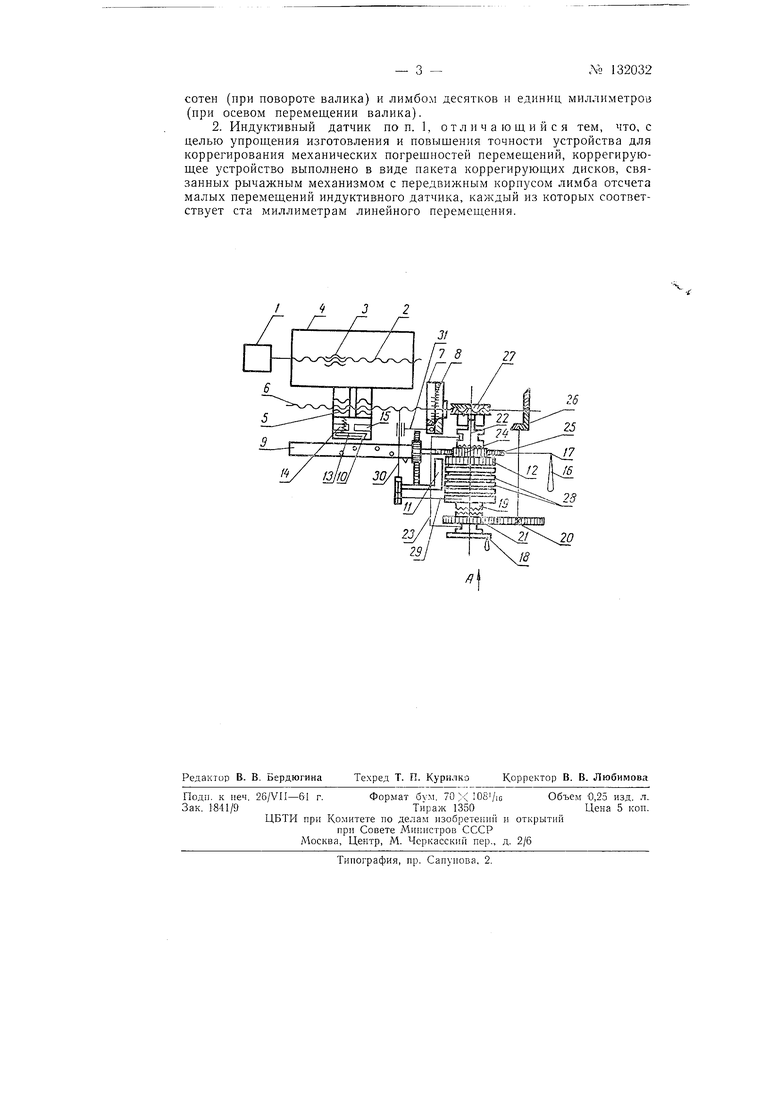
На чертеже изображена схема описываемого индуктивного датчика.
От привода / через ходовой винт 2 и гайку 3 может перемешаться рабочий стол 4. Для отсчета величины перемешения стола 4 на задан-ную величину координат дифференциальный винтовой проходЛ 132032
ной индуктивный датчик 5, описанный в основном авт. св. № 95261. Датчик со столом относительно отсчетного винта-якоря 6 с шагом, в 2 мм. Винт-якорь 6 свободно проходит внутри датчика 5 с боковым зазором в 0,15 мм и расположен параллельно движению стола.
Набор долей мм производится поворотом винта-якоря 6 на угол, определяемый соответствующим поворотом шкалы 7 относительно шкалы 8. При повороте витки винта-якоря 6 сдвигаются относительно витков датчика на требуемые доли миллиметра.
Отсчет сотен и десятков миллиметров осугцествляется при помош,и поверстного и передвижиого вспомогательного валика Я с упорами 10, располоБ-сенными на нем по спирали через 100 мм пути стола с угловым смеш,ением 15° относительно поверхности валика .9.
Валик 9 кинематически связан с линейной шкалой // сотен (при повороте валика 5) и с лимбом 12 десятков и единиц миллиметров (при осевом иеремеш,ении валика 9).
Для того, чтобы зафиксировать задапюе по; оже1ие стола, необходимо электроиндикатор включить за 0,1-0,3лгл1 до набранной координаты. Это производится при помощи упора W и рычага 13, назначение которых включить микропереключатели М и 15 при заданной координате.
При наборе заданной координаты сначала поворотом рукоятки 16 и вала 17 поворачивают валик 9 с упорами 10 на угол, соответствующий заданной сотне миллиметров, отсчитываемой по шкале //. Затем маховиком 18 включают кулачковую муфту 19. При этом зубчатые шестерни 20 и 21 выйдут из зацепления, а муфта 22 через тягу 23 отключится от реечной шестерни 24. Реечная шестерня 24 при помоши зубчатой рейки 25 переместит валик 9 в осевом направлении на величину десятков и целых единиц миллиметров, отсчитываемых по делениям лимба 12.
При г овороте маховика IS к обратном направленип кулачковая муфта 19 выключается, а шестерни 20 и 21 входят в зацепление. При помощи зубчатой пары 26 конических шестерен и червячной пары 27 поворачивается винт-якорь 6 до набора на шкалах 7 и 8 заданных долей миллиметра. При этом валик 9 через червячную иару 27 и рзечиую пару 24, 25 также переместится ;ia заданные доли миллиметра.
В дальнейшем при перемещении стола 4 рычаг 13 наталкивается на упор 10, после чего включается электроиид катор и система автоматической остановки стола от импульса датчика автоматичес и остановит стол 4 в заданной координате.
Для исправления ошибок перемещения стола из-за неточности измерительной системы служит коррегирующее устройство. Оно состоит из коррегирующих дисков 28 (по одному диску на каждые 100 мм пути стола) и рычажной системы 29, 30, 31, воздействующих в виде дополнительного поворота на конусный лимб 7. Переход рычага 29 с одного коррегирующего диска 28 на другой производится поворотом рукоятки 16 на требуемую сотню миллиметров.
Предмет изобретения
1. Индуктивный датчик по авт. св. N° 95261, отличающийся тем, что, с целью обеспечения компактности отсчетного устройства индуктивного датчика и ускорения его настройки на заданные линейные перемещения в пределах сотен и десятков миллиметров, отсчетное устройство выполнено в виде поворотного и передвижного по оси вспомогательного валика с расположенными иа нем по спирали выключающими упорами, раздельно кинематически связанного с линейной щкалой
сотен (при повороте валика) и лимбом десятков и единиц миллиметров (при осевом перемещении валика).
2. Индуктивный датчик поп. 1, отличающийся тем, что, с целью упрощения изготовления и повышения точности устройства для коррегирования механических погрешностей перемещений, коррегирующее устройство выполнено в виде пакета коррегирующих дисков, связанных рычажным механизмом с передвижным корпусом лимба отсчета малых перемещений индуктивного датчика, каждый из которых соответствует ста миллиметрам линейного перемещения.
27
/7
